Лекция 2. Основы теории автоматического регулирования
Преподаватель: Шафиков Рустам Минехаевич
А в т о м а т и ч е с к и м р е г у л и р о в а н и е м называется изменение какой-либо физической величины по требуемому закону без непосредственного участия человека.
Физическая величина, подлежащая регулированию, называется р е г у л и р у е м о й в е л и ч и н о й, а технический агрегат (аппарат), в котором осуществляется автоматическое регулирование, – р е г у л и р у е м ы м о б ъ е к т о м (о б ъ е к т о м р е г у л и р о в а н и я).
Обозначим через y(t) функцию, описывающую изменение во времени регулируемой величины, и пусть g(t) – функция, характеризующая закон ее изменения. Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g(t) за время работы системы с заданной степенью точности. Функция g(t) называется задающим воздействием.
В реальных объектах регулирования всегда существуют причины, отклоняющие регулируемую величину от требуемого закона изменения. Эти причины называются возмущающими воздействиями (возмущениями) и обозначаются:
F1(t), f2(t),..., fn(t).
Для борьбы с возмущениями объект регулирования (ОР) снабжается регулирующим органом (РО), воздействуя на который (вручную или автоматически) можно изменять регулируемую величину, компенсируя нежелательное ее изменение. Воздействие на регулирующий орган называется регулирующим воздействием и обозначается буквой m (рис. 5.1, а).
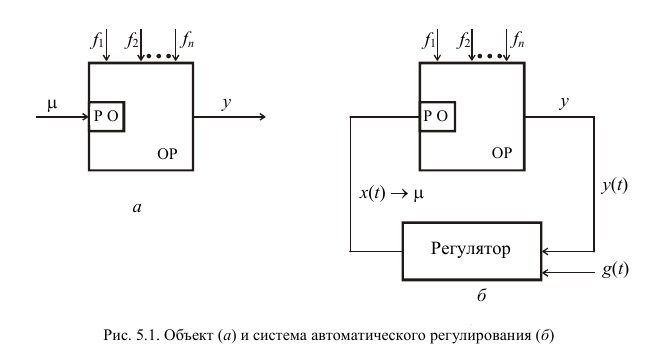
Устройство, автоматически решающее задачу регулирования в данном объекте, называется автоматическим регулятором. Объект регулирования и автоматический регулятор в совокупности образуют автоматическую систему регулирования (АСР) (рис. 5.1, б).
Если y(t) = g(t), а n = const, то АСР находится в стационарном, или установившемся режиме.
Если y(t) = g(t),а n = var, то АСР находится в нестационарном, или переходном режиме работы.
На рис. 5.2 приведены графики y(t) и x(t) в стационарном и переходном режимах работы АСР.
 Принципы регулирования
Принципы регулирования
Разнообразные, используемые в современной технике, регуляторы строятся на базе одного из двух основных принципов регулирования:
- по возмущению (по внешнему воздействию);
- по отклонению (по ошибке).
П р и н ц и п р е г у л и р о в а н и я п о в о з м у щ е н и ю. Этот принцип был предложен французским ученым Понселе и впервые реализован во второй половине ХIХ в. русским электротехником В.Н. Чиколевым в разработанных им регуляторах силы света дуговых ламп. Принцип регулирования по возмущающему воздействию называют также принципом компенсации возмущений.
Основной величиной, отклоняющей регулируемую величину от требуемого закона, являются всякого рода возмущающие воздействия. Для компенсации вредного влияния какого-либо возмущающего воздействия после его измерения можно осуществить регулирующие воздействия на объект, обеспечивающие изменение величины по требуемому закону. Для технической реализации данного принципа в состав автоматического регулятора должны входить устройства, позволяющие измерить возмущающее воздействие, и устройства, предназначенные для создания регулирующего воздействия на объект регулирования. Первые называются чувствительными элементами (ЧЭ), а вторые – исполнительными элементами (ИЭ) регулятора. Между чувствительными элементами и исполнительными могут быть включены промежуточные элементы (ПЭ), предназначенные для усиления или преобразования сигнала чувствительного элемента.
Общая схема АСР, реализующая принцип регулирования по возмущению, приведена на рис. 5.3.
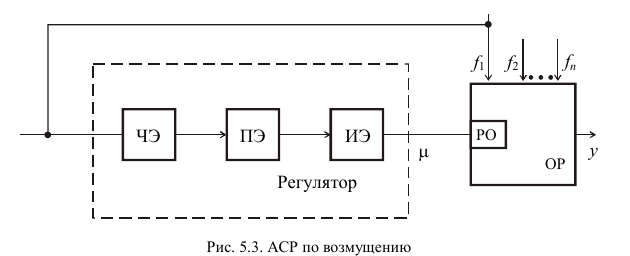
Из рис. 5.3 видно, что регулятор такого типа обеспечивает независимость инвариантность) регулируемой величины от возмущающего воздействия АСР, работающих по возмущению, имеет ряд недостатков:
1. В АСР, работающих по возмущению, инвариантность регулируемой величины обеспечивается лишь по отношению к тому возмущающему воздействию, которое измеряется чувствительным элементом регулятора. Наличие большого числа других, не контролируемых регулятором, возмущающих воздействий приводит к тому, что регулируемая величина отличается от требуемого значения, т.е. задача регулирования не выполняется.
2. Инвариантность по отношению к возмущению, измеряемому чувствительным элементом регулятора, в рассматриваемых АСР обеспечивается только при условии строгого соответствия параметров регулятора и объекта их расчетным значениям. Изменение параметров регулятора или объекта (вследствие старения, влияния внешних условий и т.д.) приводит в таких системах к отклонению регулируемой величины от требуемого значения.
Оба отмеченных недостатка АСР, работающих по возмущению, обусловлены тем, что в таких системах истинное значение регулируемой величины не измеряется и не контролируется. Регулирующее воздействие m от регулируемой величины y не зависит. Система работает по разомкнутому циклу.
Из-за отмеченных выше недостатков системы, работающие по разомкнутому циклу, для решения задач автоматизации применяются только в качестве составной части более сложных, комбинированных АСР.
П р и н ц и п р е г у л и р о в а н и я п о о т к л о н е н и ю. Этот принцип построения автоматических регуляторов предложен и впервые осуществлен в 1765 г. русским механиком И.И. Ползуновым в регуляторе уровня воды в котле изобретенной им паровой машины. Несколько позже (независимо от И.И. Ползунова) этот принцип использовал английский механик Дж. Уатт при разработке центрального регулятора скорости вращения выходного вала паровой машины. В связи с этим принцип регулирования по отклонению часто называют принципом Ползунова – Уатта.
Основная задача АСР состоит в выполнении равенства y(t) = g(t), причем чем точнее соблюдается равенство, тем лучше АСР. Разность между требуемым законом изменения регулируемой величины g(t) и действительным законом ее изменения y(t) характеризует качество работы АСР:
x(t) = g(t)-y(t), (5.1)
при идеальной работе x(t) = 0
Для оценки качества работы АСР используют так называемое отклонение:
y(t) = y(t)-g(t).
Принцип регулирования по отклонению состоит в том, что тем или иным путем определяется отклонение параметра и соответственно осуществляется регулирующее воздействие на объект регулирования, сводящее отклонение к нулю. Для определения сигнала отклонения используются три элемента: задающий, чувствительный и сравнивающий. Задающий элемент формирует воздействие g(t).
Чувствительный элемент измеряет действительное значение.
Сравнивающий элемент представляет собой простейшее вычислительное устройство.
Функциональная схема АСР, работающая по отклонению, приведена
на рис. 5.4.

В этой схеме регулируемая величина y измеряется чувствительным элементом и подается на вход сравнивающего элемента (СЭ). На другой вход сравнивающего элемента поступает задающее воздействие g, выработанное в задающем элементе (ЗЭ). На выходе сравнивающего элемента образуется сигнал отклонения. После преобразования в промежуточных элементах (ПЭ) сигнал ошибки поступает на исполнительный механизм, перемещающий регулирующий орган таким образом, чтобы свести сигнал ошибки к нулю. Чувствительный, промежуточный и исполнительный органы в совокупности образуют автоматический регулятор. На рис. 5.4 видно, что АСР, работающая по отклонению, состоит из соединенных между собой автоматического регулятора (АР) и объекта регулирования (ОР). На вход регулятора поступают задающие воздействия g и регулируемая величина y. Выходной величиной является регулирующее воздействие, приложенное к регулирующему органу.
В отличие от регулирования по возмущению при регулировании по отклонению ни одно из возмущающих воздействий не измеряется.
Основным преимуществом АСР, работающих по отклонению, перед АСР, реализующими принцип регулирования по возмущению, является их способность выполнять задачу регулирования при любом числе возмущающих воздействий. Объясняется это тем, что в АСР, работающих по отклонению, ни одно возмущение не измеряется; работа системы не связана ни с какими конкретными возмущениями. Вместо возмущения в таких системах непрерывно измеряется отклонение, характеризующее соответствие действительного закона изменения регулируемой величины требуемому. Вторым преимуществом АСР, работающих по отклонению, является отсутствие местных требований к стабильности характеристик элементов регулятора и объекта. Обусловлено это тем, что изменение параметров ре-
гулятора и объекта приводит к появлению отклонения, которое немедленно обнаруживается системой и ликвидируется.
Таким образом, АСР, работающие по отклонению, лишены основных недостатков АСР, работающих по возмущению. Это обстоятельство явилось причиной того, что в настоящее время регулирование по отклонению является основным принципом построения регуляторов в самых различных областях техники.
АСР, работающие по отклонению, представляют собой системы с обратной связью. Под обратной связью понимают подачу сигнала, когда сигнал обратной связи складывается с входным сигналом, обратная связь называется положительной, если вычитается, – отрицательной. Для систем регулирования входным устройством является задающее воздействие g, выходным – регулируемая величина y.
Наличие обратной связи в АСР, работающих по отклонению, приводит к образованию замкнутого контура передачи воздействий. Регулятор действует на объект, объект, в свою очередь, воздействует на регулятор. В связи с этим АСР, реализующие принцип регулирования по отклонению, называют системами, работающими по замкнутому циклу, или замкнутыми системами. Однако системам с обратной связью присущи и некоторые
недостатки.
Так как регулирующее воздействие, направленное на ликвидацию отклонения, появляется только при y = 0, то, следовательно, прежде чем ликвидировать отклонение, необходимо допустить его возникновение. Кроме того, замкнутые системы склонны к колебаниям.
Оба отмеченных недостатка АСР, работающих по отклонению, отсутствуют у систем, работающих по возмущению. В то же время, как уже указывалось, системы, работающие по отклонению, лишены основных недостатков систем, работающих по возмущению. Поэтому целесообразно использовать оба основных принципа регулирования в одной системе. Сис-
темы, в которых одновременно используется как регулирование по отклонению, так и регулирование по возмущению, называются системами комбинированного регулирования. Такие системы обычно представляют собой сочетание двух систем, одна из которых работает по замкнутому, а вторая по разомкнутому циклу, обеспечивает инвариантность регулируемой величины по отношению к одному из основных возмущений (рис. 5.5), наиболее сильно влияющему на регулируемую величину.

Система, работающая по замкнутому циклу, снимает вредное влияние
всех других возмущающих воздействий. Промежуточные и исполнительные элементы у обеих систем являются общими.
Основные виды автоматических систем регулирования
В зависимости от закона g(t) изменения регулируемой величины y(t) все АСР принято делить на системы стабилизации, программного регулирования и следящие.
С и с т е м ы с т а б и л и з а ц и и предназначены для поддержания постоянного значения регулируемой величины y(t). В этих системах g(t) = const.
С и с т е м ы п р о г р а м м н о г о р е г у л и р о в а н и я предназначены для изменения регулируемой величины y(t) по известному закону в функции времени или какой-либо другой величины. В таких системах задающее воздействие представляет собой заранее известную функцию времени g(t) = g0(t) или g = g0(z) и ее часто называют программой регулирования.
Программы вида g(t) =g0(t) называются временными, а программы вида g = g0(z) – параметрическими.
С л е д я щ и е с и с т е м ы предназначены для изменения регулируемой величины y(t) по закону, который заранее неизвестен. В таких системах воздействие g(t) представляет собой случайную функцию времени. В зависимости от наличия статических свойств все системы автоматического регулирования разделяют на статические и астатические.
Система автоматического регулирования, в которой в установившемся состоянии существует однозначная зависимость между значением регулируемой величины и положением регулирующего органа, называется с т а т и ч е с к о й.
А с т а т и ч е с к о й называют систему автоматического регулирования, в которой положение регулирующего органа не связано с установившимся значением регулируемой величины.
В зависимости от способности приспосабливаться (адаптироваться) к изменяющимся внешним условиям и перестраиваться таким образом, чтобы компенсировать указанные изменения, системы автоматического регулирования разделяются на экстремальные, самообучающиеся и обучаемые.
В э к с т р е м а л ь н ы х с и с т е м а х автоматически поддерживается экстремальное (минимальное и максимальное) значение регулируемого параметра, соответствующее оптимальным условиям протекания регулируемого процесса.
С а м о о б у ч а ю щ е й с я с и с т е м о й называется такая система, в которой самообучение при отыскании оптимального режима работы объекта регулирования все время автоматически совершенствуется по мере накопления в системе опыта регулирования.
О б у ч а е м о й с и с т е м о й называется такая система, в которой для нормального функционирования в процессе работы накапливается опыт, а обучающее воздействие система получает извне или со стороны человека оператора, или со стороны автоматического обучающего устройства, не входящего в состав этой системы.