ВВЕДЕНИЕ
Данное пособие «расчет судового электропривода рулевого устройства» является руководством при выполнении курсового проекта по дисциплине «Электрооборудование и автоматика судов» студентами специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов». заочной формы обучения Иртышского филиала НГАВТ.
Цель курсового проекта состоит в том, чтобы закрепить знания, полученные в процессе изучения курса «Электрооборудования и автоматика судов», а так же сопутствующих дисциплин при разработке конкретных разделов курсового проекта. Кроме того, в процессе разработки проекта студент должен получить навыки инженерного подхода к решению практических технических задач и вопросов.
Судовой электропривод рулевого устройства является самым ответственным приводом, так как от его работы может зависеть не только производительность работы судна в целом, но и безопасность плавания, сохранность пассажиров, экипажа и груза.
К электроприводу рулевого устройства предъявляются самые жесткие требования со стороны Российского Речного Регистра и других классификационных и контролирующих органов.
Перед началом работы над проектом необходимо повторить разделы курса «Электропривод», а так же курсов «Электрические машины»; «Электрические аппараты» и другие разделы, относящиеся к проектированию. Студент должен ясно представлять себе требования соответствующих разделов правил Российского Речного Регистра, Морского регистра России и других контролирующих организаций, а так же ГОСТ, ОСТ, РТМ, ТУ и т.п.
ОБЪЕМ И СОСТАВ КУРСОВОГО ПРОЕКТА И ТРЕБОВАНИЯ К ЕГО ВЫПОЛНЕНИЮ
Расчетно-пояснительная записка
Пояснительная записка оформляется в соответствии с методическими указаниями:
Беляков В. Е., Руппель А. А., Сидоренко А. А. «Правила выполнения и оформления контрольных, лабораторных работ и курсовых и дипломных проектов».
Расчетно-пояснительная записка должна содержать:
- титульный лист
- задание на проектирование
- введение, расчеты, диаграммы и т.п. с пояснениями к ним;
- заключение
- список литературы
- оглавление
В введении необходимо показать общие задачи проектирования и требования, предъявляемые к проектируемому электроприводу. Сделать анализ рулевых ЭП и цель проекта.
В отдельных главах пояснительной записки приводят расчеты и описание необходимых параметров и характеристик соответствующих схем и оборудования, выбор и конструкция аппаратов, машин и изделий. Расчеты и описание должны сопровождаться эскизами, графиками, диаграммами и т.п. Все рисунки (диаграммы, эскизы) должны иметь сквозную письменную и выполняться на стандартных листах бумаги.
Формулы должны иметь расшифровку с указанием всех входящих в них величин и их размерности в системе СИ. Если формулы, технические данные отдельно оборудования берутся из литературы, то необходимо давать ссылки на эту литературу, указывать ее номер в списке литературы. Если приводятся однотипные расчеты, то в пояснительной записке приводится только один расчет, а остальные сводятся в таблицу.
В записке необходимо сделать выводы о результатах проектирования.
Записка должна состоять из 25…30 страниц формата А4.
Графическая часть
В этой части должно быть сделано следующее:
- принципиальная схема ЭП со спецификацией
- монтажная схема ЭП или структурная
Чертежи выполняются на листах формата А2 или в электронном виде.
Примечание. Выполнять проект по приведенным примерам не рекомендуется, так как это приводит к ошибкам. примеры служат для сравнения результатов проектирования (например, для сравнения мощности привода исходных параметров судна).
Расчет электропривода рулевого устройства
1. Общие сведения
Рулевое устройство служит для управления судном; удержания на курсе, изменения курса и маневрах. Рулевое устройство состоит из пера руля с баллером, передаточного механизма, двигателя и системы управления и контроля.
1.1. Типы рулей и определение размеров пера руля
На судах применяются рули: простые (обыкновенные), балансирные и полубалансирные. Перо руля может быть пластичной и обтекаемой формы. Простые рули имеют возможность более надежного крепления к рудерпосту, поэтому применяются на ледоколах и судах активного ледового плавания. Обтекаемая форма руля уменьшает сопротивление движению судна, поэтому такие рули применяются почти на всех современных судах. Обтекаемость пера руля мало оказывает влияния на максимальные момент баллера, но влияет на сопротивление движения судна. При простом руле момент сопротивления на баллере проявляется сразу при отклонении руля от диаметральной плоскости, а при баллансирном или полубалансирном – только при достижении угла α, который, зависит от степени балансировки.
1.1.1. Площадь пера руля
 или
или 
где L – длина корпуса судна между перпендикулярами, м
T - осадка в полном грузу, м
β – коэффициент зависящий от назначения и типа движителя судна, который принимают:
 - для речных колесных судов
- для речных колесных судов
 - для речных винтовых судов
- для речных винтовых судов
 - для озерных и морских судов
- для озерных и морских судов
м – коэффициент зависящий от типа судна, который принимают:
м=(0,02…0,025) – для судов каботажного плавания
м=(0,045…0,083) – для речных винтовых
м=(0,025…0,033) – озерные и морские буксиры
1.1.2. Обычно при наличии двух гребных винтов (самый распространенный вариант) принимают два руля. Однако из-за конструктивных соображений, увеличение маневренности и других факторов, иногда приходится применять количество рулей отличающихся от числа винтов. Есть речные суда, у которых при двух винтах количество рулей достигает 6 единиц. В этих случаях необходимо площадь S разделить на число рулей.
Так при двух рулях
 , м2
, м2
1.1.3. Высота руля (размах руля)
h=T – (0,5…1), м – для морских судов
h=(0,9…0,95)Т – для речных судов
1.1.4. Ширина руля (хорда руля)

1.1.5. Относительная толщина руля, характеризующая профиль руля обтекаемой формы

где б – наибольшая толщина профиля сечения пера горизонтальной плоскостью, м
1.1.6. Относительный размах

1.1.7. Степень балансировки (компенсации)
 редко 0,37 (предельная величина)
редко 0,37 (предельная величина)
Обычно принимают с=(0,15…0,2)
Отсюда Sб = c S - площадь балансирной части, м
Степень компенсации в очень редких случаях принимают равной 0,37, так как дальнейшее увеличение приводит к неустойчивой работе рулевого привода.
1.2. Передаточные механизмы
Передача момента двигателя на баллер руля бывает электромеханической и электрогидравлической.
Электромеханические подачи могут быть секторными (самые распространенные как на речных, так и на морских судах), винтовые (редко встречающиеся), штуртросовые (в основном на судах старой постройки) и валиковые (на малых судах).
Электрогидравлические передачи можно разделить на передачи с насосами постоянной передачи и с регулируемой передачей.
Так как в проекте предусматривается расчет привода с электромеханической передачей, то и рассмотрим более подробно эту передачу, а именно: секторную рулевую машину РЭР 7,5 – II.
Рулевая машина монтируется на фундаменте 2. Момент вала двигателя 1 через червячную 5 и цилиндрическую 3 пары редуктора передается на цилиндрическую шестерню 6. Валы редуктора и электродвигателя соединены между собой эластичной пальцевой муфтой. Шестерня 6 поворачивает зубчатый венец сектора 8, бронзовой втулкой насаженного свободно на баллере 14 руля. Ниже сектора на баллере жестко посажен румпель 12, связанный с сектором двумя пружинными амортизаторами 9, которые предохраняют зубья передач от повреждения при ударе волн о перо руля. Сектор 8 поддерживается опорными роликами 11, по которым он перекатывается при перекладки руля. Поворот сектора ограничивается электрическим конечным выключателем 4 с приводом от вала шестерни 6 и буферными ограничителями. Положение пера руля передается на пост управления электрическим датчиком 19 с приводом 20 от баллера руля.
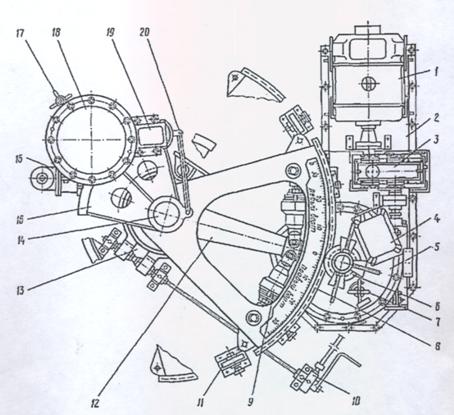
Рис. 1 Секторная рулевая машина
Сектор 15 запасного ручного привода закреплен на баллере. Его зубчатый венец поворачивается шестерней выходного вала червячного редуктора 18, червяк которого вращают штурвалом с помощью валиковой передачи 16. Основной и запасной приводы отключатся кулачковыми муфтами.
Для определения момента на баллере руля необходимо знать силу давления на перо руля и точку ее приложения, т.е. радиус.
 , Н∙м
, Н∙м
где F2 – равнодействующая всех сил давление на перо руля, Н, зависящая от угла перекладки α, град
r – радиус расстояния от передней кромки руля до центра приложения силы
2.1. Сила давления
Есть несколько методик и эмпирических формул для определения силы давления воды на перо руля и момент на баллере. Самые точные результаты дает продувка модели руля в аэродинамической трубе или при использовании соответствующих таблиц или диаграмм, построенных в результате продувки различных профилей рулей. из-за отсутствия указанных материалов будем пользоваться ниже приведенной формулой справедливой для плоского руля прямоугольной формы.
где с – постоянный коэффициент
с = (195…220) – для двухвинтовых судов
с = (370…415) – для одновинтовых судов
2.2. Радиус
Радиус r не остается величиной постоянной, так как центр приложения силы F2 смещается в зависимости от угла перекладки.
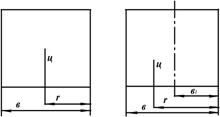
Рис. 2 Простой и балансирный рули (ц –центр давления силы F2, r - радиус, в1 – ширина балансирной части пера руля)
r = (0,2+0,3sinα)в – для простого руля, м
r = c(0,2+,0,3sinα)в-в – для балансирного руля, м
2.3 Момент на баллере
 - для простого руля Н∙м
- для простого руля Н∙м
 - для балансирного руля Н∙м
- для балансирного руля Н∙м
где v – скорость полного переднего хода судна, м/с
S1 – площадь одного пера руля (если каждый руль приводится в движение от отдельного электродвигателя)
α – угол перекладки руля, град
Момент следует определить только для переднего хода.
Примечание. При расчете F2, r и Мб рекомендуется составить таблицы куда занести все результаты расчета (см. примеры). По результатам расчета следует построить кривые зависимостей  и
и  . При балансирном руле нужно определить угол α1 в зависимости от Мо, пользуясь кривой , как показано на примере 2.
. При балансирном руле нужно определить угол α1 в зависимости от Мо, пользуясь кривой , как показано на примере 2.
3. Момент на валу электродвигателя
3.1 Момент на валу электродвигателя при перекладки руля от диаметральной плоскости на любой борт

где I – передаточное число от вала двигателя к баллеру, обычно i = (1000…2500)
 - к.п.д. передаточного механизма
- к.п.д. передаточного механизма
3.2 Момент при перекладки от борта к ДП
Так как при обратном ходе определение момента представляет значительные трудности, то его принимают равным моменту холостого хода
 - для простого руля
- для простого руля
 - для балансирного руля
- для балансирного руля
4. Предварительный выбор исполнительного двигателя системы Г-Д
4.1. Максимальный момент на валу двигателя
4.2. Момент при отсутствии погрузочного момента (при перекладки от борта к ДП). Мо = (0,1…0,2)Мб мах – для простого руля, Мо = (0,2…0,3)Мб мах – для балансирного руля
4.3. Момент на валу заторможенного двигателя

4.4. Скорость идеального холостого хода
Для простого руля

Для балансирного руля

 и
и  - необходимо выразить в ряд
- необходимо выразить в ряд
где  - время перекладки руля с борта на борт с учетом время разгона
- время перекладки руля с борта на борт с учетом время разгона 
4.5 Номинальная расчетная мощность
 Вт
Вт
или  Вт
Вт
где  - номинальный расчетный момент двигателя Н∙м
- номинальный расчетный момент двигателя Н∙м
 - номинальная скорость выражения двигателя рад/с
- номинальная скорость выражения двигателя рад/с
4.6. Выбирают двигатель серии ПР или ПБ, имеющих закрытое исполнение, исходя PH и nH ( )
)
4.7. Для построения механической характеристики выбранного двигателя определяют
4.7.1. Номинальный момент
 Н∙м где Рн – в Вт,
Н∙м где Рн – в Вт,  - в рад/с
- в рад/с
4.7.2 Скорость идеального холостого хода

4.7.3 Скорость соответствующая Мо
4.7.4 скорость соответствующая 
5. Проверка выбранного двигателя на время перекладки руля в режиме маневрирования
5.1. Скорость двигателя при пуске до выхода на естественную характеристику (принимаем Мп = Мн)
5.2. Время разгона двигателя до выхода на естественную характеристику
 с
с
где k – коэффициент произведения движущихся масс к валу двигателя, обычно (k = 1,1…1,3), в рулевых приводах иногда достигает 1,6
 кг∙м2 – момент инерции
кг∙м2 – момент инерции
 - маховой момент выбранного двигателя, кг∙м2 берется из каталога
- маховой момент выбранного двигателя, кг∙м2 берется из каталога
5.3 Время разгона двигателя по естественной характеристике
 с
с
5.4 Угол перекладки руля за время разгона двигателя
 рад/с или
рад/с или  град
град
5.5. Время работы двигателя с моментов Мо
 - для простого руля
- для простого руля
 - для балансирного
- для балансирного
5.7 Время торможения двигателя (принимаем Мт = Мп)

5.8. Полное время перекладки


5.9 Строим нагрузочную диаграмму и тахограмму (рис. 3)
6. Проверка выбранного двигателя на прогрев
6.1. Среднеквадратичный момент двигателя при перекладке руля с борта на борт


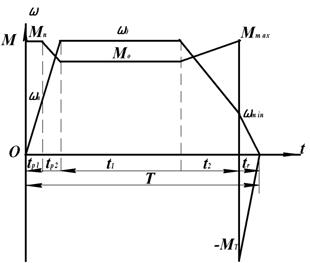
Рис. 3 Нагрузочная диаграмма и тахограмма двигателя при перекладке руля с борта на борт
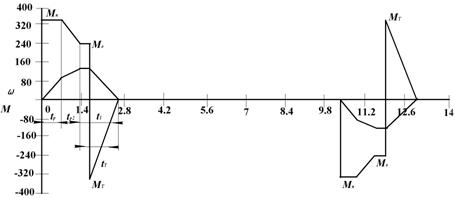
Рис. 4 Нагрузочная диаграмма и тахограмма двигателя при работе ЭП в режиме следования судна по заданному курсу
6.2. Время работы двигателя с моментом Мо при следовании по курсу (примем средний угол перекладки  )
)
6.3. Суммарное время работы ЭП за цикл

6.4. Время цикла
где z – нормированное число перекладок в час
6.5. Время паузы

6.6. Строим нагрузочную диаграмму и тахограмму
6.7. Среднеквадратичный момент при следовании судна по курсу


где  ,
,  эти коэффициенты отражают условия нагрева и охлаждения в повторно-кратковременном режиме работы
эти коэффициенты отражают условия нагрева и охлаждения в повторно-кратковременном режиме работы
7. Расчет и выбор преобразователя
7.1. Мощность генератора

где  - коэффициент загрузки двигателя исполнителя
- коэффициент загрузки двигателя исполнителя
Выбираем генератор постоянного тока с напряжением 115 В и вычисляем все его основные параметры
7.2. Габаритная мощность генератора
По этой мощности выбирают габарит генератора, так как наличие размагничивающей обмотки увеличивает габарит машины, хотя такая машина будет недоиспользована во время работы.
7.3. Коэффициент загрузки выбранного генератора

где Рг – расчетная мощность генератора
РН – мощность выбранного генератора
7.4 Мощность возбудителя
7.5 Коэффициент загрузки возбудителя

где Рнв – мощность выбранного возбудителя
7.6 Мощность приводного двигателя
Выбирают асинхронный двигатель серии 4А морской модификации или АМ, АОМ, МАФ
Примечание. Если задана система управления с ЭМУ в качестве генератора, то нужно выбрать ЭМУ по мощности генератора. Если задан ЭМУ как возбудитель, то выбирать его необходимо по мощности возбудителя. Если обмотки возбуждения питаются от судовой сети, то возбудитель не нужен, т.е. преобразователь будет двухмашинный.
В качестве генераторов и возбудителей применяют машины 2П или при отсутствии каталогов – П.
Пример расчета №1
Исходные данные
| Тип судна | сухогруз |
| Длина корпуса | 
|
| Ширина | 
|
| Осадка | 
|
| Скорость |  
|
| Угол перекладки руля | 
|
| Тип руля | Простой |
| Напряжение сети | 
|
| Тип электропривода | Г-Д с ЭМУ в качестве возбудителя |
| Управление электроприводом | следящее |
8. Предварительный расчет мощности привода
8.1 Определяем площадь пера руля
8.2 Принимаем к установке 2 руля, площадь каждого из них будет
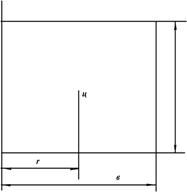
Рис. 5 Перо руля
Высота пера руля

Ширина пера руля
8.3 Сила давящая на перо руля

Такой расчет будет верным, если на каждый руль устанавливается отдельный привод. Если же один двигатель – исполнитель будет приводить оба руля, то в формулу силы необходимо подставить суммарную площадь рулей, т.е. 
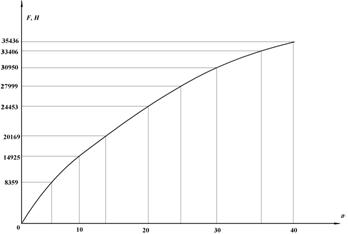
Рис. 6 Зависимость силы давления на перо руля от угла перекладки
8.4 Расстояние от центра силы до оси баллера

8.5 Момент на баллере руля


Рис. 7 Зависимость момента на баллере руля от угла перекладки
Максимальный момент на баллере руля для привода одного руля
 Н∙м
Н∙м
где принимаем 
 - скорость судна
- скорость судна
8.6 Момент двигателя расчетный максимальный
 Н∙м
Н∙м
Принимаем 

8.7 Момент холостого хода двигателя
 Н∙м
Н∙м
8.8 Момент стоянки двигателя под током
 Н∙м
Н∙м
8.9 Номинальный расчетный момент двигателя
 Н∙м
Н∙м
8.10 Условная скорость при холостом ходе



8.11 Номинальная угловая скорость

8.12 Номинальная мощность двигателя

9. Предварительный выбор двигателя
Тип двигателя ПР52М
Номинальное напряжение 
Номинальная мощность 
Номинальная мощность 
к.п.д. 
Частота вращения  (
( )
)
Наибольшая частота вращения  (
( )
)
Маховой момент 
9.1. Так как выбранный двигатель будет использоваться при напряжении 110В. то скорость его вращения будет снижена пропорционально сниженного напряжения

где  - напряжение по каталогу
- напряжение по каталогу 
 - напряжение генератора
- напряжение генератора 
 - частота вращения соответственно по каталогу
- частота вращения соответственно по каталогу 
 - частота вращения при снижении напряжения
- частота вращения при снижении напряжения


9.2 Номинальный момент выбранного двигателя
 Н∙м
Н∙м
где  - мощность двигателя, которая так же снизится при снижении скорости вращения в два ряда
- мощность двигателя, которая так же снизится при снижении скорости вращения в два ряда
9.3 Скорость идеального холостого хода
 или
или 
9.4 Скорость соответствующая 


9.10 Скорость соответствующая 

10. Проверка выбранного двигателя на время перекладки руля в режиме маневрирования
10.1 Скорость двигателя при пуске в момент выхода на естественную характеристику


 принимаем равным
принимаем равным  т.е.
т.е. 
10.2 Время разгона двигателя до выхода на естественную характеристику

где  - момент инерции двигателя
- момент инерции двигателя
 - коэффициент учитывающий инерционность вращающихся масс рулевой машины
- коэффициент учитывающий инерционность вращающихся масс рулевой машины
10.3 Время разгона двигателя на естественной характеристике

10.4 Угол перекладки руля за время разгона двигателя

10.5 Время работы двигателя с моментом

10.6 Время работы двигателя с моментом изменяющимся от до



10.7 Время торможения (принимаем  )
)

10.8 Полное время перекладки

11. Проверка выбранного двигателя на нагрев
11.1 Среднеквадратичный момент двигателя при перекладке руля с борта на борт


 Н∙м
Н∙м
 Н∙м
Н∙м
11.2 Время работы двигателя с моментом при следовании судна по курсу ()

11.3 Суммарное время за цикл

11.4 Время цикла
11.5 Время паузы

11.6 Среднеквадратичный момент двигателя при следовании судна по курсу

 Н∙м
Н∙м
 Н∙м
Н∙м
12. Выбор генератора
12.1 Мощность генератора

12.2 Выбираем генератор П42М
Номинальная мощность 
Номинальное напряжение 
Номинальный ток
к.п.д. 
Номинальная частота вращения 
13. Выбор возбудителя
13.1 Мощность возбудителя

13.2 Выбираем в качестве возбудителя генератор постоянного тока типа П21М
Мощность 
Напряжение 
Частота вращения 
к.п.д. 
При снижении оборотов до 1450 об/мин его мощность снизится примерно до 0,6 кВт, а напряжение до 115 В. Если возбуждение осуществляется непосредственно от судовой сети через выпрямитель, возбудитель выбирать не нужно.
14. Выбор приводного двигателя
14.2  Мощность двигателя
Мощность двигателя

где 
14.2 Выбираем приводной двигатель
тип 4А100S4ОМ2
Номинальная мощность 
к.п.д. 


Частота вращения 
Линейный ток 
Кратность пускового тока 

Скольжение 
Маховой момент 
Пример расчета №2
Исходные данные те же, что и в примере №1, за исключением типа руля. В данном примере руль полубалансирный
15. Предварительный расчет привода
15.1 Площадь пера руля
15.2 К установке принимаем два руля с площадью пера руля
15.3 Высота пера руля
15.4 Ширина пера руля
15.5 Сила давящая на перо каждого руля

Составим таблицу №1
Примем
Таблица 1 – Результаты расчетов

| 
| 
| 
| 
| 
|
| 0,087 | 0,226 | 108,25 | 8334,7 | ||
| 0,174 | 0,252 | 108,25 | 15068,4 | ||
| 0,25 | 0,276 | 108,25 | 19620,3 | ||
| 0,342 | 0,305 | 108,25 | 24434,2 | ||
| 0,433 | 0,325 | 108,25 | 29060,8 | ||
| 0,5 | 0,35 | 108,25 | 30851,25 | ||
| 0,573 | 0,37 | 108,25 | 33494,7 | ||
| 0,643 | 0,393 | 108,25 | 35498,4 |
15.6 Строим зависимость (кривую) (см. рис. 8)
15.7 Расстояние (радиус) от центра приложения силы  до оси баллера
до оси баллера

где  - ширина балансирной части пера руля
- ширина балансирной части пера руля
15.8 Момент на баллере руля
 Расчет сводим в таблицу №2 и строим график зависимости
Расчет сводим в таблицу №2 и строим график зависимости  см. рис. 9.
см. рис. 9.
15.9 Момент холостого хода 

Таблица 2 – Результаты расчета
|
| ||||||||

| 0,064 | 0,127 | 0,184 | 0,254 | 0,302 | 0,362 | 0,41 | 0,466 |

| 533,4 | 3610,1 | 6206,3 | 8776,4 | 11168,2 | 13732,8 | 16542,3 | |

| 10668,8 | 7220,3 | 12412,6 | 17552,7 | 22336,3 | 27465,7 | 33084,5 |
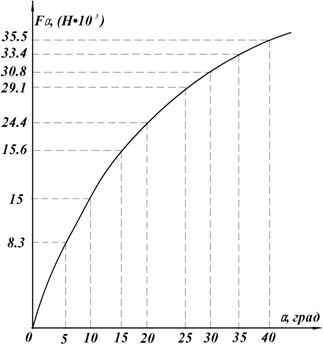
Рис. 8 Кривая 
При построении на оси М нужно отложить Мо и от него плавно провести линию  , как показано на графике. Тогда выход на кривую на оси абсцисс отсечет
, как показано на графике. Тогда выход на кривую на оси абсцисс отсечет  .
.
До угла  момент сопротивления является отрицательным и двигатель компенсирует только момент трения и передачи.
момент сопротивления является отрицательным и двигатель компенсирует только момент трения и передачи.
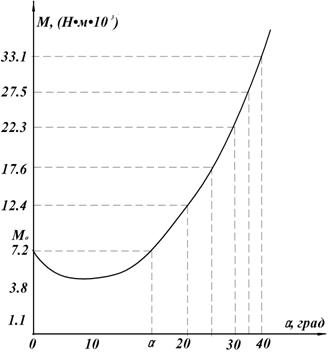
Рис. 9 Кривая
15.10 Максимальный момент на валу двигателя

15.11 Момент холостого хода

15.13 Номинальный момент

15.14 Угловая скорость холостого хода
