1. Рассмотрим однородное тело, находящееся пол воздействием внешних сил. На элемент объема этого тела действуют силы двух типов. К первому типу относятся силы, величина которых пропорциональна объему элемента. Такие силы
называются объемными. К ним, например, относятся сила тяжести, силы притяжения, центробежные силы и т. д. Ко второму типу относятся силы, действующие на поверхность элемента со стороны окружающих его частей тела и пропорциональные площади поверхности элемента. Такая сила, отнесенная к единице площади, называется напряжением. Мы будем рассматривать однородное напряжение, считая, что его действие на поверхность элемента определенной формы и ориентации не зависит от положения этого элемента и теле. Будем считать, кроме того, что тело под действием указанных выше сил находится в статическом равновесии.
Пусть М — произвольная точка рассматриваемого однородного тела и  содержащий эту точку элемент плоскости
содержащий эту точку элемент плоскости  проходящей через точку М. Ориентация элемента
проходящей через точку М. Ориентация элемента  определяется единичным вектором
определяется единичным вектором  нормальным плоскости
нормальным плоскости  (рис. 15).
(рис. 15).
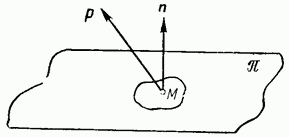
Рис. 15.
Сила  действующая на элемент
действующая на элемент  будет равна
будет равна

где  — напряжение в точке М, соответствующее элементу
— напряжение в точке М, соответствующее элементу  Это напряжение будет зависеть от ориентации элемента
Это напряжение будет зависеть от ориентации элемента  т. е. от вектора
т. е. от вектора  так что
так что

Так как мы рассматриваем однородное напряжение, то эта функция будет одинаковой во всех точках тела.
Оказывается, эта функция а будет линейной вектор-функцией аргумента  Чтобы доказать это, заметим прежде всего, что так как напряжения на разных сторонах одной и той же площадки имеют одинаковую величину и противоположные направления, то функция а удовлетворяет условию
Чтобы доказать это, заметим прежде всего, что так как напряжения на разных сторонах одной и той же площадки имеют одинаковую величину и противоположные направления, то функция а удовлетворяет условию 
Рассмотрим, далее, ортогональную систему координат с началом в точке М и базисными векторами  Проведем плоскость
Проведем плоскость  параллельно плоскости
параллельно плоскости  так, чтобы она образовала вместе с координатными плоскостями тетраэдр
так, чтобы она образовала вместе с координатными плоскостями тетраэдр 
(рис. 16). Рассмотрим, какие силы действуют на элемент объема нашего тела, заключенного внутри тетраэдра. На него, во-первых, действует объемная сила  где через
где через  обозначена сила, отнесенная к единице объема. Затем на каждую из четырех граней тетраэдра действует сила со стороны окружающих частей тела. Если положить
обозначена сила, отнесенная к единице объема. Затем на каждую из четырех граней тетраэдра действует сила со стороны окружающих частей тела. Если положить  то
то  на грань
на грань  тетраэдра будет действовать сила
тетраэдра будет действовать сила  где через
где через  обозначена площадь этой грани. Знак минус в этом выражении стоит потому, что внешняя нормаль к грани
обозначена площадь этой грани. Знак минус в этом выражении стоит потому, что внешняя нормаль к грани  тетраэдра совпадает с вектором
тетраэдра совпадает с вектором  Точно так же силы, действующие на грани
Точно так же силы, действующие на грани  будут равны соответственно
будут равны соответственно  где
где  — площади этих граней. На грань
— площади этих граней. На грань  будет действовать сила
будет действовать сила  где
где  — площадь треугольника
— площадь треугольника  Так как рассматриваемый элемент объема находится в статическом равновесии, то имеет место равенство
Так как рассматриваемый элемент объема находится в статическом равновесии, то имеет место равенство


Рис. 16.
Первое слагаемое этой суммы имеет более высокий порядок малости, чем остальные. Поэтому им можно пренебречь и написать предыдущее равенство в виде

Но легко проверить, что
где  — угол, который нормаль
— угол, который нормаль  к плоскости
к плоскости  образует с вектором Так как вектор
образует с вектором Так как вектор  единичный, то
единичный, то  Поэтому равенство (1) можно переписать так:
Поэтому равенство (1) можно переписать так:

Запишем разложение некторов  по базису
по базису 

Подставляя эти разложения в предыдущее равенство и приравнивая коэффициенты при линейно независимых векторах  получим
получим

Это равенство доказывает наше утверждение: напряжение  линейно зависит от нормали
линейно зависит от нормали  к элементу поверхности, функция а является линейной вектор-функцией, а матрица
к элементу поверхности, функция а является линейной вектор-функцией, а матрица  этой линейной вектор-функцииобразует тензор второй валентности, который называют тензором напряжений.
этой линейной вектор-функцииобразует тензор второй валентности, который называют тензором напряжений.

Рис. 17.
2. Докажем теперь, что тензор напряжений  является симметричным тензором. Для этого выделим из нашего тела куб с ребром
является симметричным тензором. Для этого выделим из нашего тела куб с ребром  и гранями, параллельными координатным плоскостям (рис. 17), и посмотрим, какие силы на него действуют, Обозначим через
и гранями, параллельными координатным плоскостям (рис. 17), и посмотрим, какие силы на него действуют, Обозначим через  площадь грани куба. Тогда на его грани
площадь грани куба. Тогда на его грани  действуют силы
действуют силы  на грани
на грани  силы
силы  и
и  на грани
на грани  и
и  — силы
— силы  Эти силы можно считать приложенными в центрах граней. Подсчитаем момент этих сил относительно точки Р, расположенной в центре куба. Легко видеть, что этот момент будет равен следующему выражению:
Эти силы можно считать приложенными в центрах граней. Подсчитаем момент этих сил относительно точки Р, расположенной в центре куба. Легко видеть, что этот момент будет равен следующему выражению:

Вычисляя входящие сюда векторные произведения по известным формулам (стр. 27), получим

Но так как выделенный кубик находится в статическом равновесии, то  Отсюда следует симметрия тензора
Отсюда следует симметрия тензора 

Диагональные компоненты  тензора напряжений называются нормальными компонентами, так как определяемые ими составляющие векторов
тензора напряжений называются нормальными компонентами, так как определяемые ими составляющие векторов  действуют перпендикулярно соответствующим координатным плоскостям. Положительное значение компоненты
действуют перпендикулярно соответствующим координатным плоскостям. Положительное значение компоненты  характеризует растяжение, а отрицательное — сжатие тела. Компоненты
характеризует растяжение, а отрицательное — сжатие тела. Компоненты  называются сдвиговыми компонентами тензора напряжений, так как определяемые ими составляющие векторов
называются сдвиговыми компонентами тензора напряжений, так как определяемые ими составляющие векторов  действуют параллельно соответствующим координатным плоскостям.
действуют параллельно соответствующим координатным плоскостям.
Тензор папряжеиий  как всякий симметричный тензор, может быть приведен к диагональному виду
как всякий симметричный тензор, может быть приведен к диагональному виду
при помощи ортогонального преобразования. При этом сдвиговые компоненты тензора  обращаются в нуль, а нормальные компоненты совпадают с собственными значениями этого тензора. Их называют главными напряжениями, а соответствующие им собственные направления — главными направлениями тензора напряжений.
обращаются в нуль, а нормальные компоненты совпадают с собственными значениями этого тензора. Их называют главными напряжениями, а соответствующие им собственные направления — главными направлениями тензора напряжений.
Уравнение характеристической поверхности тензора напряжений записывается в виде

Эта поверхность называется поверхностью напряжений. Если принять за базисные главные направления тензора о, то уравнение этой поверхности примет вид

Так как числа  могут быть как положительными, так и отрицательными, то эта поверхность может иметь любой из четырех видов, указанных в § 4 гл. 111 (стр. 107),
могут быть как положительными, так и отрицательными, то эта поверхность может иметь любой из четырех видов, указанных в § 4 гл. 111 (стр. 107),
Отметим еще некоторые частные формы тензора напряжений. Будем считать при этом, что за базисные направления  приняты главные направления этого тензора.
приняты главные направления этого тензора.
а) Линейное напряженное состояние (одноосное напряжение) характеризуется тензором  имеющим вид
имеющим вид

Такое строение тензор напряжений имеет, например, в длинном однородном вертикальном стержне, к концу которого подвешен груз.
б) Плоское напряженное состояние (двуосное напряжение) характеризуется тензором  вида
вида

Частным случаем плоского напряженного состояния является чистый сдвиг, при котором тензор напряжений имеет вид
Путем поворота базиса на 45° вокруг вектора  матрица чистого сдвига приводится к виду
матрица чистого сдвига приводится к виду

в) Объемное напряженное состояние (трехосное напряжение) - наиболее общая система напряжений с тремя отличными от нуля главными напряжениями. Его частным случаем является гидростатическое сжатие, при котором тензор  является шаровым:
является шаровым:

где  — давление, постоянное в рассматриваемом объеме жидкости.
— давление, постоянное в рассматриваемом объеме жидкости.
3. Предположим, что тело подвергается однородной малой деформации. В результате этой деформации точка М тела с радиусом-вектором х переходит в точку  с радиусом-вектором у, так что
с радиусом-вектором у, так что
где вектор и, определяющий перемещение точки М, зависит от вектора  Рассмотрим, как деформируется при этом окрестность точки М. Пусть
Рассмотрим, как деформируется при этом окрестность точки М. Пусть  принадлежащая этой окрестности точка с радиусом-вектором
принадлежащая этой окрестности точка с радиусом-вектором  (рис. 18), так что
(рис. 18), так что


Рис. 18.
Она перейдет в точку М с радиусом-вектором

где  Если положить
Если положить  , то получим
, то получим

где

Вектор  определяет деформацию окрестности точки М. И так как эта деформация предполагается однородной, т. е. одинаковой во всех точках рассматриваемого тела, то вектор Ди не должен зависеть от вектора х, а будет зависеть только от вектора
определяет деформацию окрестности точки М. И так как эта деформация предполагается однородной, т. е. одинаковой во всех точках рассматриваемого тела, то вектор Ди не должен зависеть от вектора х, а будет зависеть только от вектора 

Покажем, что зависимость вектора  от вектора
от вектора  является линейной зависимостью. Будем считать при этом, что функция
является линейной зависимостью. Будем считать при этом, что функция  является непрерывной функцией аргумента
является непрерывной функцией аргумента  это согласуется с физическим смыслом функции
это согласуется с физическим смыслом функции 
Итак, пусть  — две точки из окрестности точки М, определяемые радиусами-векторами
— две точки из окрестности точки М, определяемые радиусами-векторами 

Тогда

Складывая эти равенства, получим

Но  . Поэтому предыдущее равенство может быть переписано в виде
. Поэтому предыдущее равенство может быть переписано в виде

что совпадает с первым условием, которому удовлетворяет линейная вектор-функция.
Для доказательства выполнения второго ее свойства заметим, что из предыдущего равенства следует, что

при целом а. Далее, если  — целое, то
— целое, то

откуда
Сопоставляя предыдущие равенства, получим

т. е. второе условие, определяющее линейную вектор-функцию, выполняется для рациональных множителей  Но так как
Но так как  по предположению непрерывна, то это условие будет выполняться и для любых действительных а:
по предположению непрерывна, то это условие будет выполняться и для любых действительных а:

Таким образом, мы доказали, что при однородной деформации вектор  , определяющий деформацию окрестности точки М рассматриваемого тела, является линейной вектор-функцией от
, определяющий деформацию окрестности точки М рассматриваемого тела, является линейной вектор-функцией от  Если обозначить через
Если обозначить через  координаты векторов
координаты векторов  и Ди относительно ортонормированного базиса
и Ди относительно ортонормированного базиса  то эта линейная вектор-функция может быть записана в виде
то эта линейная вектор-функция может быть записана в виде

где  тензор второй палентности. Если обозначить через
тензор второй палентности. Если обозначить через  координаты вектора
координаты вектора  характеризующего положение точки
характеризующего положение точки  тела относительно точки
тела относительно точки  то из равенства (2) получим
то из равенства (2) получим

Так так деформация предполагается малой, то компоненты тензора  следует считать настолько малыми, что их произведениями при вычислениях можно пренебрегать.
следует считать настолько малыми, что их произведениями при вычислениях можно пренебрегать.
Тензор  описывает не только деформацию окрестности точки М рассматриваемого тела, но и ее вращение вокруг точки М. Чтобы выделить из пего часть, которая определяет чистую деформацию, рассмотрим, как меняются метрические свойства (длины и углы) при переходе от окрестности точки М к окрестности точки
описывает не только деформацию окрестности точки М рассматриваемого тела, но и ее вращение вокруг точки М. Чтобы выделить из пего часть, которая определяет чистую деформацию, рассмотрим, как меняются метрические свойства (длины и углы) при переходе от окрестности точки М к окрестности точки  Метрические свойства в окрестности точки М определяются квадратичной формой
Метрические свойства в окрестности точки М определяются квадратичной формой  а в окрестности точки
а в окрестности точки  - квадратичной формой
- квадратичной формой  Но из равенства (2) следует, что
Но из равенства (2) следует, что

Так как деформация малая, то третьим слагаемым в правой части равенства можно пренебречь, и мы получим

откуда

Полученная величина характеризует чистую деформацию окрестности точки М. Правая часть этого выражения может быть записана в виде

Разложим теперь тензор  на симметричную часть
на симметричную часть  и кососимметричную часть
и кососимметричную часть 

где

Подставляя это разложение тензора  в равенство (4), получим
в равенство (4), получим

гак как  Следовательно, деформация окрестности точки М определяется только симметричным тензором
Следовательно, деформация окрестности точки М определяется только симметричным тензором  который и называется тензором деформации. Кососимметричный тензор
который и называется тензором деформации. Кососимметричный тензор  не влияет на изменение метрических свойств окрестности точки М и, следовательно, определяет ее вращение вокруг точки М.
не влияет на изменение метрических свойств окрестности точки М и, следовательно, определяет ее вращение вокруг точки М.
4. Рассмотрим отдельно случаи, когда тензор является симметричным или кососиммегричным тензором. Пусть сначала  согу — кососимметричиый тензор. Покажем, что этот тензор порождает малый поворот окрестности точки М вокруг оси, определяемой вектором
согу — кососимметричиый тензор. Покажем, что этот тензор порождает малый поворот окрестности точки М вокруг оси, определяемой вектором  где
где

В самом деле, если  — линейное преобразование, имеющее кососимметричную матрицу
— линейное преобразование, имеющее кососимметричную матрицу  то, как было показано
то, как было показано  гл. III (стр. 106),
гл. III (стр. 106),

Поэтому

и


Рис. 19.
Но легко видеть, что последнее преобразование представляет собой попорот на малый угол  вокруг оси, проходящей через точку О и определяемой вектором о (рис. 19). Действительно, вектор
вокруг оси, проходящей через точку О и определяемой вектором о (рис. 19). Действительно, вектор  будет касательным к окружности, описываемой концом вектора
будет касательным к окружности, описываемой концом вектора  при его вращении вокруг оси
при его вращении вокруг оси  и его длина равна
и его длина равна  где
где  — расстояние конца вектора
— расстояние конца вектора  до оси
до оси 
Пусть теперь  — симметричный тензор. Этот тензор определяет чистую деформацию окрестности точки М. Тогда
— симметричный тензор. Этот тензор определяет чистую деформацию окрестности точки М. Тогда

Вектор  переходит в вектор
переходит в вектор

При этом с точностью до величин второго порядка малости

Следовательно, компонента  тензора
тензора  определяет относительное удлинение тела вдоль направления
определяет относительное удлинение тела вдоль направления  Компоненты
Компоненты  будут определять поворот этого направления по отношению к векторам
будут определять поворот этого направления по отношению к векторам  Точно так же компоненты
Точно так же компоненты  определяют относительное удлинение тела вдоль направлений и
определяют относительное удлинение тела вдоль направлений и  а компоненты
а компоненты  при
при  — поворот этих направлений. Кроме того, так как
— поворот этих направлений. Кроме того, так как  то поворот вектора
то поворот вектора  в направлении вектора
в направлении вектора  совпадает с поворотом векюра
совпадает с поворотом векюра  в направлении вектора
в направлении вектора  Компоненты
Компоненты  при
при  называют сдвиговыми компонентами тензора деформации.
называют сдвиговыми компонентами тензора деформации.
Найдем теперь относительное удлинение тела вдоль произвольного направления, определяемого единичным вектором  Пусть
Пусть  Тогда
Тогда

Удлинение тела вдоль направления вектора I равно проекции вектора  , которая вычисляется следующим образом:
, которая вычисляется следующим образом:

Относительное удлинение тела вдоль направления вектора I равно отношению этой проекции к первоначальной длине вектора  т. е. к
т. е. к  Если обозначить относительное удлинение через
Если обозначить относительное удлинение через  , то
, то

Легко найти величину относительного удлинения  тела, построив характеристическую поверхность тензора
тела, построив характеристическую поверхность тензора  уравнение которой имеет вид
уравнение которой имеет вид
Используя результат, полученный в § 5 гл. II, можно написать, что

где  — расстояние от центра О характеристической поверхности до точки М, в которой она пересекается с лучом
— расстояние от центра О характеристической поверхности до точки М, в которой она пересекается с лучом 
Определим еще, как изменится объем при деформации тела, определяемой тензором  Как было доказано в гл. III
Как было доказано в гл. III
(стр. 96), коэффициент искажения объемов при линейном преобразовании равен определителю матрицы этого линейного преобразования. Если обозначить через  обьем элемента тела до деформации, а через
обьем элемента тела до деформации, а через  объем того же элемента после деформации, то получим
объем того же элемента после деформации, то получим

где в правой части отброшены слагаемые, содержащие произведения компонент тензора деформации, являющиеся величинами не ниже второго порядка малости. Из этого соотношения видно, что коэффициент объемного расширения тела при деформации, определяемой тензором  равен следу этого тензора:
равен следу этого тензора:

Приведем симметричный тензор  к главным осям. Тогда его матрица примет диагональный вид:
к главным осям. Тогда его матрица примет диагональный вид:
Собственные значения  тензора
тензора  называются главными коэффициентами деформации тела, а его главные оси — главными направлениями деформации. Главные направления деформации тела характеризуются тем, что они остаются взаимно ортогональными при деформации. Главные коэффициенты деформации
называются главными коэффициентами деформации тела, а его главные оси — главными направлениями деформации. Главные направления деформации тела характеризуются тем, что они остаются взаимно ортогональными при деформации. Главные коэффициенты деформации  определяют удлинение тела вдоль главных направлений деформации.
определяют удлинение тела вдоль главных направлений деформации.
5. Вернемся теперь к общему случаю. Пусть однородная малая деформация тела определяется уравнениями

где  Так как с точностью до величин второго порядка малости
Так как с точностью до величин второго порядка малости

то произвольная деформация окрестности точки М представляет произведение чистой деформации, определяемой симметричным тензором деформации  и поворота, определяемого
и поворота, определяемого
кососимметричным тензором  При этом главные направления тензора деформации, оставаясь неподвижными в теле, поворачиваются вместе с ним под влиянием тензора поворота
При этом главные направления тензора деформации, оставаясь неподвижными в теле, поворачиваются вместе с ним под влиянием тензора поворота  вокруг вектора
вокруг вектора  с координатами
с координатами  на угол
на угол 
Рассмотрим поверхность, в которую перейдет сфера радиуса  с центром в точке М при малой деформации тела. Уравнение этой сферы может быть записано в виде
с центром в точке М при малой деформации тела. Уравнение этой сферы может быть записано в виде

Чтобы получить уравнение искомой поверхности, нужно в уравнении (6) выразить координаты вектора  через координаты вектора
через координаты вектора  с помощью уравнений (5). С точностью до величин второго порядка малости мы имеем
с помощью уравнений (5). С точностью до величин второго порядка малости мы имеем

Подставляя эти выражения в уравнение (6) и снова отбрасывая члены второго порядка малости, получаем

Но так как  где
где  то последнее уравнение может быть переписано в виде
то последнее уравнение может быть переписано в виде

Таким образом, при рассматриваемой деформации сфера с центром в точке М, определяемая уравнением (6), переходит в центральную поверхность второго порядка с центром в точке  определяемую уравнением (7). Легко доказать, что эта поверхность будет эллипсоидом. В самом деле, приведем тензор
определяемую уравнением (7). Легко доказать, что эта поверхность будет эллипсоидом. В самом деле, приведем тензор  к каноническому виду. Тогда уравнение (7) запишется так:
к каноническому виду. Тогда уравнение (7) запишется так:

Пользуясь малостью величин  перепишем его в виде
перепишем его в виде

А это уравнение представляет собой уравнение эллипсоида, полуоси которого  Этот эллипсоид называется эллипсоидом деформации.
Этот эллипсоид называется эллипсоидом деформации.
6. Заметим, что рассмотренные тензоры напряжений и деформации не связаны с симметрией кристалла. Это происходит потому, что указанные тензоры описывают не свойства кристалла, а первый из них описывает внешнее воздействие на кристалл, а второй — реакцию кристалла на это или какое-либо другое воздействие. Такие тензоры в кристаллографии называют полевыми тензорами. Тензоры же, описывающие свойства кристалла, называют материальнымп тензорами. К ним относятся рассмотренные выше тензор удельной электропроводности, тензор теплопроводности, тензоры диэлектрической и магнитной проницаемости и целый ряд тензоров, которые будут рассмотрены и следующем параграфе.