Рассматривается ПО режима полета по маршруту, предназначенное для решения задач программных расчетов траекторий полетов в горизонтальной плоскости во всех режимах автоматич.
Наиболее часто:
1) «программный полет» по плановым ППМ (ИПМ®ППМi®КПМ) задаваемым штурманом (летчиком) в оперативном режиме полета;
2) «оперативный полет» для выхода в заданную точку с заданными параметрами ЗПУ и S.

Маршруты могут строится с пролетом ППМ и с ЛУР (при L<ЛУР признак «полет с ЛУР»).
Траектория формируется по результатам логического анализа команд с ПУ (признаки включения программного полета, включающие ЛУР, координаты и номера ИПМ, ППМi, КПМ). Кодовые номера ППМ облегчают обращение к массивам данных.
Текущее положение ЛА определяется относительно программных точек траектории, и выражается соотношениями:

(7.24) – для сферической земли. Для эллипсоида ____ формулы Коврайского:
________ 
____________________  км
км

«0» - текущее местоположение.
 - очередной
- очередной  - текущее
- текущее  .
.
 - очередной - пройденный .
- очередной - пройденный .
 - следующий - очередной .
- следующий - очередной .
 - текущее - пройденный .
- текущее - пройденный .
 - следующий - пройденный .
- следующий - пройденный .
Прямой полет:  . Обратный полет
. Обратный полет  .
.
Индексация ППМ (кодовые номера) изменяются в момент смены ЛЗП:  ;
;  , а
, а  - новое значение, т.о. формируется тройка ППМ.
- новое значение, т.о. формируется тройка ППМ.
В режиме «программный полет» ВСС осуществляет следующие действия: вычисляется угол доворота (УД) в точку ППМ и формируется признак «доворот», формируется  (см. п. 7.1); при УД=0 (вычисляется в процессе разворота) и W направленный к ППМ формируется ЧО; сбрасывается признак «доворот»; формируется признак «ЧО рт» (начинается полет по ЛЗП); формируется признак «смена ЛЗП» (при подходе к ППМ,
(см. п. 7.1); при УД=0 (вычисляется в процессе разворота) и W направленный к ППМ формируется ЧО; сбрасывается признак «доворот»; формируется признак «ЧО рт» (начинается полет по ЛЗП); формируется признак «смена ЛЗП» (при подходе к ППМ,  ); формируется новая тройка ППМ. Траектория может меняться оперативно (полетное программирование).
); формируется новая тройка ППМ. Траектория может меняться оперативно (полетное программирование).
После ввода или выборки  и записи
и записи  в соответствующие ячейки, рассчитывается УД:
в соответствующие ячейки, рассчитывается УД:
УД=ПУ-ЗПУ;  ;
; 
где  - гироскопический угол ГСП;
- гироскопический угол ГСП;  - угол ____ной ориентации ГСП.
- угол ____ной ориентации ГСП.
Рассчитан УД ® в алгоритм ______________.

Модуль алгоритма выхода на ИПМ:

Вход – по отсутствию признака «предпосадочный маневр». ПМ основного маршрута имеют
Ni 61…76. ПМ оперативного маршрута 01…04.
После загрузки Ni=Nипм и рассчитывается УД, формируется признак «доворот» и УД поступает для вычисления .
Модуль формирования управляющего сигнала .
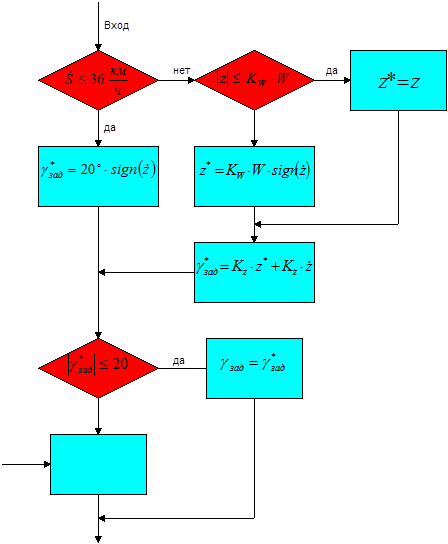
Угол излома траектории 0…180°.
Все коэффициенты для самолетов типа ТУ-154.
 характеризует степень перпендикулярности линии полета и ЛЗП.
характеризует степень перпендикулярности линии полета и ЛЗП.
При £ 36 км/ч  (т.е. доворот с max креном), ³ 36 км/ч,
(т.е. доворот с max креном), ³ 36 км/ч,  (см. п. 7.1.1. (7.13)).
(см. п. 7.1.1. (7.13)).


_____________ введено ограничение на max , что исключает сваливание самолета:


Модуль подрежима смещения ЛЗП.

Смещенный полет на  на дальность
на дальность  . После прохода заданной дальности
. После прохода заданной дальности  смещение обнуляется и полет продолжается по программно-заданной ЛЗП. При смене ЧО заданное смещение сохраняется и вычисляется новое значение ЛУР с учетом введенного значения
смещение обнуляется и полет продолжается по программно-заданной ЛЗП. При смене ЧО заданное смещение сохраняется и вычисляется новое значение ЛУР с учетом введенного значения  . Если введенная длительность полета меньше некоторой заданной величины, определяемой длительностью переходных процессов, основного и вспомогательного ________лей алгоритмов, _____лет смещением __ отменяется.
. Если введенная длительность полета меньше некоторой заданной величины, определяемой длительностью переходных процессов, основного и вспомогательного ________лей алгоритмов, _____лет смещением __ отменяется.
Разворот может быть выполнен в т ______________ в полетного задания, переход. __________ на другую и в оперативном _______________ сходе на оперативную ЧО.
Модуль реализации алгоритма ЛУР:

В первом блоке осуществляется идентификация самолета по отношению к тройке ППМ (осуществляется привязка местоположения ЛА к одной из ЧО; поиск осуществляется по алгоритму выхода на ИПМ с последующим перебором ППМi, так и по представленному алгоритму путем перебора программных ЧО).

Программа осуществляет выход на 3-й ППМ путем «сшивания» ЧО.