Начальное скольжение.

Номинальное скольжение Sн и критическое скольжение Sк двигателя.
Номинальное скольжение:

Критическое скольжение:

Определяем критическую угловую скорость вращения ротора двигателя:

Номинальное напряжение, конструктивный коэффициент, мощность двигателя:

Механические потери:
Коэффициент вязкого трения:

Сопротивление ротора:
Сопротивление статора:
Индуктивность статора и ротора:
Индуктивность статора и индуктивность ротора должны быть приблизительно одинаковы.



Индуктивность рассеивания статора и индуктивность рассеивания ротора:

Взаимоиндукция:

Проверка конструктивного коэффициента:
Можно принять что С1 (1.068) совпадает с выбранным ранее с1 (1.066), (небольшая разница в полученных данных произошла в результате округлений данных в расчётах), значит конструктивный коэффициент выбран правильно.
Приведенное активное сопротивление ротора:
Потери энергии в статоре:

Потери энергии при нагрузке:
Средний момент:

Потери энергии при пуске и торможении (Дж):

Потери мощности в номинальном режиме:
Допустимая частота включений:

Допустимая частота включений (по условию) Z =30, а допустимая частота включений двигателя (рассчитанная Z =530) значит по частоте включений двигатель вполне подходит.
8. Построение механической характеристики, используя формулу Клосса:
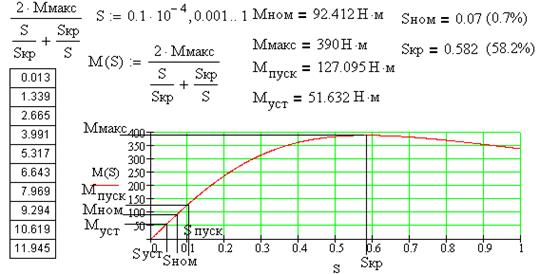
Для удобства производится также построение механической характеристики в логарифмическом масштабе.
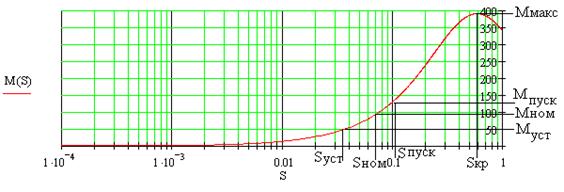
Рисунок 16 – Механическая характеристика двигателя
Графическим способом можно найти скольжение при пусковом и установившемся моментах (что и показано на графиках). Sпуск=0,11 (11%), Sуст=0,035 (3,5%).
Построение характеристики изменения скорости при изменении момента сопротивления на валу двигателя
β – жесткость механической характеристики электропривода.
Линеаризированная механическая характеристика асинхронного двигателя.

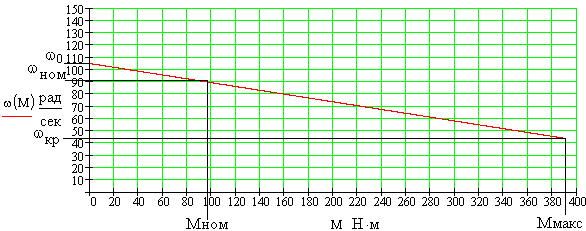
Рисунок 17 – Линеаризированная механическая характеристика
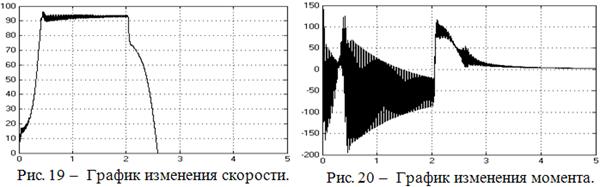
Построение переходных процессов
Все полученные в ходе проектирования данные вводятся в виртуальную электронную лабораторию (математический пакет) MATLAB, и производится построение переходных процессов.
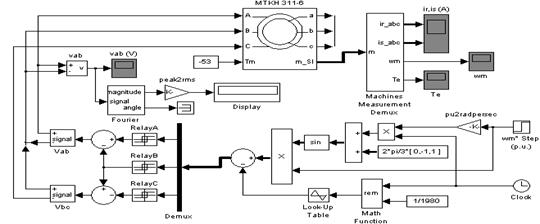
Рисунок 18 – Структурная схема ЭП
Все математические вычисления в данном курсовом проекте производились с помощью компьютерной программы (математического пакета) Mathcad 2000 Professional, а моделирование в виртуальной(компьютерной) электронной лаборатории (математическом пакете) MATLAB.
Литература
1. Львов А.П. Справочник электромонтёра. – Киев: Вища школа, Главное издательство, 1980, – 376 стр.
2. П.С. Сергеев Проектирование электрических машин. Издательство «Энергия», 1970 г.
3. М.М. Кацман. Проектирование электрических машин. М. Энергоатомиздат, 1984 г.
4. Ключев В.И.: «Теория электропривода», Москва, Энергоатомиздат, 1985 г.
5. Герман-Галкин С.Г.: «Компьютерное моделирование полупроводниковых систем в MatLab 6.0», Санкт-Петербург, Корона Принт, 2001 г.
6. Иванченко Ф.К.: «Конструкция и расчет подъемно-транспортных машин», Киев, Вища Школа, 1983 г.
7. Драчев Г.И.: «Теория электропривода», Челябинск, ЮУрГУиздат, 2002 г.
8. Борцов Ю. А, Соколовский Г.Г. Автоматизированный электропривод с упругими связями. – СПб.: Энергоатомиздат, 1992.