Цель работы: Приобретение практических навыков в воспроизведении кинематических схем и определении основных кинематических параметров реальных электромеханических систем РЭС.
Вопросы к домашнему заданию
1. Что такое кинематическая схема механизма? Для чего она нужна?
Кинематическая схема ЭМС – это схема, на которой с помощью условно графических обозначений изображают звенья ЭМС и кинематические пары с указанием размеров необходимых для анализа.
Кинематические схемы необходимы для наглядного представления различных ЭМС, а так же для детального анализа каждой из составляющих этого механизма.
2. Какие типы кинематических схем существуют? Дать краткое назначение каждого типа.
Кинематические схемы в зависимости от основного назначения подразделяют на структурные, функциональные и принципиальные. На структурной кинематической схеме элементы изображают в виде простых геометрических фигур, а так же все составные части и связи между ними. На функциональных схемах обозначают в виде простых геометрических фигур функциональные элементы, участвующие в передаче движения, с использованием буквенных кодов. На кинематической принципиальной схеме отображают все совокупность кинематических элементов и их соединений, все кинематические связи между парами, цепями и т.д.
3. Правила выполнения кинематических схем.
Правила выполнения кинематических схем устанавливают стандарты: 2.701—84 (СТСЭВ 651—77), 2.70В-68 (СТ СЭВ 1187—78), 2. 770— 68, 2.721—74 (СТСЭВ 1984—79).
На структурной кинематической схеме изображают в виде простых геометрических фигур все основные функциональные части изделия и основные взаимосвязи между ними. Внутри геометрических фигур указывают наименование функциональных частей изделия. Допускается (при применении ЭВМ) графическое изображение функциональных частей и связей между ними заменять аналитической надписью. Для обозначения функциональных частей применяют буквенные коды (табл. 1).
На функциональной кинематической схеме изображают в виде простых геометрических фигур все функциональные части изделия, участвующие в процессе, иллюстрируемом данной схемой, и связи между ними.
Внутри каждой геометрической фигуры указывают соответствующее обозначение или надпись. Обозначения функциональных частей располагают в последовательности их функциональной связи. Допускается, если это не нарушает наглядности представления процессов, учитывать действительное расположение функциональных частей.
Для обозначения функциональных частей применяют буквенные коды.
Расположение механизмов на принципиальной схеме соответствует положению исполнительных органов — исходному, среднему или рабочему.
Для упрощения чтения схем допускается перемещать элементы механизма за пределы его контура и поворачивать элементы вместе с валом.
Каждому кинематическому элементу схемы присваивают порядковый номер, начиная от источника движения, и буквенно-цифровые позиционные обозначения.
Покупной или заимствованный механизм (редуктор, вариатор и др.) нумеруют одним номером, без разбивки на элементы. Валы нумеруют римскими цифрами.
4. Какие параметры и характеристики могут быть определены из кинематического анализа механизма?
Из кинематического анализа механизма могут быть определены:
- угловые и линейные перемещения ведомых звеньев;
- линейные перемещения, скорости и ускорения точек звеньев;
- передаточные отношения механизма.
Результаты кинематического анализа используются для оценки соответствия кинематических свойств механизма заданным условиям, а также для последующих динамических и прочностных расчетов. (Например, по найденным значениям ускорений определяются инерционные нагрузки на звенья, а установленные зависимости изменения скорости позволяют рассчитать инерционные характеристики механизма к каждом его положении).
5. Дать определение функции положения, передаточного отношения, передаточного числа. Передаточное отношение группы соединённых механизмов.
Функцией положения (перемещения) ведомого звена называется функциональная зависимость между перемещениями ведомого и ведущих звеньев механизма.
Передаточной функцией механизма называется первая производная от функции положения по углу поворота φ1 или линейному перемещению S1 ведущего звена. Мгновенное значение передаточной функции определяет отношения мгновенной угловой скорости ωm (или линейной скорости VN точки N) ведомого звена m к угловой скорости ωk (или линейной скорости VА точки А) ведущего звена k.
Если звенья механизма только вращаются, то вместо передаточной функции рассматривают передаточное отношение.
Передаточным отношением называется отношение мгновенных угловых скоростей (или угловых перемещений, частот вращения) ведущего k и ведомого m звеньев. Например, передаточная отношение от ведущего k к ведомому m звену:
ikm= ωk / ωm=dφk/dφm=nk/nm
Передаточному отношению ikm приписывается положительный знак, если движение звеньев, относительно параллельных осей, совпадают и отрицательный, если не совпадает.
Передаточное отношение системы соединенных механизмов:
где ij – передаточное отношение j-го механизма.
Передаточное число не зависит от направления потока энергии и выбора ведущего звена, а показывает лишь во сколько раз механизм способен изменить угловую скорость.
 .
.
6. Какими параметрами определяется передаточное отношение червячной передачи?
Передаточное отношение червячной передачи от червяка 1 к колесу 2 определяется соотношением:

где z1 – число заходов червяка и z2 – число зубьев колеса – определяются непосредственным подсчётом.
7. Что такое «паразитное» колесо? Для чего оно служит? Как оно влияет на передаточное отношение механизма?
Паразитное — зубчатое колесо, вводимое в качестве промежуточного между ведущим и ведомым колесами в случаях, когда они не могут войти в сцепление или когда нужно изменить направление вращения ведомого вала. Паразитные зубчатые колеса применяют в тех случаях, когда расстояние между первым и последним валом велико и непосредственно зацепляющиеся колеса увеличивают габаритные размеры механизма, или же в тех случаях, когда нужно соответственно изменить направление вращения последнего вала.
Паразитные колеса не влияют на абсолютное значение передаточного отношения, но влияют на его знак.
8. Приведите примеры условного изображения на кинематической схеме элементов: зубчатого зацепления, червячной передачи, винтовой передачи, шарнирного и жёсткого закрепления, отсчетного устройства.
Зубчатые передачи:
а) внешнее зацепление без уточнения типа зубьев
б) с прямыми зубьями

в) с косыми зубьями

г) с шевронными зубьями
д) с внутренним зацеплением
 .
.
Червячная передача:
 .
.
Винтовая передача:
 .
.
Шарнирное закрепление:
 .
.
Жесткое закрепление:
 .
.
Отсчетное устройство:
 .
.
9. Каким свойством обладают начальные окружности зубчатых колёс?
Начальная окружность - это воображаемая окружность, являющаяся контуром основания начального цилиндра; она делит каждый зуб на две неравные части: меньшую - головку зуба и большую - ножку зуба, ее условно изображают штрих - пунктирной тонкой линией толщиной s/3 и менее. По радиусам начальных окружностей можно определить передаточное отношение зубчатой передачи:

10. Что такое многоступенчатая передача? Как вычислить передаточное отношение многоступенчатой передачи? Как определить знак передаточного отношения?
Многоступенчатой передачей называется механизм, состоящий из ряда соединенных между собой простых передач. Передаточное отношение многоступенчатой передачи равно произведению передаточных отношений её ступеней:
Если направление движения начального и конечного звеньев многоступенчатой передачи не совпадают, то передаточное отношение берётся с отрицательным знаком.
11. Назовите основные типы ЭМС и дайте перечень кинематических параметров для каждого класса.
К передачам относятся механизмы: зубчатые, червячные, фрикционные и гибкой связью.
Фрикционные передачи роликами: осуществляют передачу движения между параллельными и пересекающимися валами. Передаточное отношение фрикционной передачи роликами с учетом упругого скольжения:

 ,
,
где x =1,01-1,03 – коэффициент, учитывающий скольжение и зависящий от шероховатости поверхности, наличия смазки и условий эксплуатации; D1, D2 – диаметры роликов;.
Передачи гибкой связью применяют для передачи вращения между валами при относительно больших межосевых расстояниях. Такие передачи используют при любом расположении валов, но особенно между параллельными валами.С учетом скольжения ремня по шкивам передаточное отношение:
где ξ = 1.01÷1.03 – коэффициент, учитывающий скольжение.
Зубчатые передачи:Передаточное отношение от колеса 1 к колесу 2 одноступенчатой зубчатой передачи с внешним зацеплением
определяется из соотношения:
 ,
,
где n1 и n2, j1 и j2, r1 и r2, z1 и z2 – числа оборотов, углы поворота, радиусы начальных окружностей, числа зубьев первого и второго колеса соответственно – определяются непосредственным замером.
Червячные передачи: Передаточное отношение червячной передачи от червяка 1 к колесу 2 определяется соотношением:
где z1 – число заходов червяка и z2 – число зубьев колеса – определяются непосредственным подсчётом.
 Передаточное отношение передачи винт – гайка:
Передаточное отношение передачи винт – гайка:
где S - шаг резьбы; zp – число заходов; d2 – средний диаметр резьбы; b - угол подъёма резьбы.
12. В каком случае применяется последовательный ряд колёс, а в каком ступенчатый?
Ступенчатый ряд колес применяется для получения большого передаточного отношения, в нём, в отличие от последовательного ряда колес, колеса жестко соединены между собой осью и представляют собой одно звено.
Ступенчатый ряд характеризуется тем, что на каждой промежуточной оси располагается по два зубчатых колес, причем каждое из колес входит в одно зацепление с другим колесом. Общее передаточное отношение ступенчатой зубчатой передачи равно произведению передаточных отношений отдельных ступеней

Где m – число внешних зацеплений.
Паразитный (последовательный) ряд является частным случаем ступенчатого ряда, когда на каждой промежуточной оси находится по одному паразитному колесу, входящему в два зацепления с другими. Паразитные колеса не влияют на величину передаточного отношения, но могут изменить его знак. Формула передаточного отношения для паразитного ряда имеет вид:
 .
.
Лабораторные задания
Задание первое. Воспроизвести, кинематическую схему предложенной ЭМС.
1. Определить основные кинематические функции, выполняемые ЭМС.
Функция, выполняемая данной ЭМС - изменение скорости углового перемещения.
2. Определить типы всех передаточных звеньев ЭМС.
Все передаточные звенья представляют собой зубчатые передачи.
3. Выяснить взаимодействие всех звеньев ЭМС.
Взаимодействие между звеньями происходит посредством внешнего зацепления зубчатых колес.
4. Пользуясь условными обозначениями кинематических элементов воспроизвести кинематическую схему ЭМС.
5. Присвоить позиционные обозначения всем элементам ЭМС.
6. Описать принцип действия и взаимодействие всех звеньев по кинематической схеме.
Кинематическая схема редуктора представлена на рисунке 1.
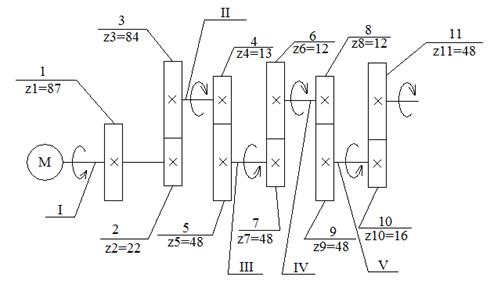
Рисунок 1 – Кинематическая схема редуктора
Задание второе. Определить кинематические параметрыЭМС: передаточное отношениеЭМС в целом, передаточные отношения по ступеням.
Передаточные отношения отдельных кинематических пар:
| 
|
| 
|
|
Передаточные отношения ступеней и системы в целом:




Так как  – то данная ЭМС является редуктором.
– то данная ЭМС является редуктором.
Вывод: в ходе лабораторной работы были приобретены навыки в воспроизведении кинематических схем и определении основных кинематических параметров электромеханических систем, применяемых в РЭС.