Общие сведения. Существует две группы способов использования судовой РЛС для определения места судна:
• по точечным ориентирам;
• по пространственным ориентирам.
Точечные ориентиры — это такие, размерами которых при про-!■ падке линий положения можно пренебречь. Точечные ориентиры делятся на:
• активные отражатели, которые изображаются на экране в виде ответной точки;
• пассивные отражатели, представляющие собой многогранные фигуры из металла, обладающие способностью отражать радиоволны без рассеивания. Наилучшей формой пассивных отражателей являются уголковые отражатели;
• естественные или искусственные ориентиры, которыми могут быть маяки, навигационные знаки, заводские трубы и т. п.
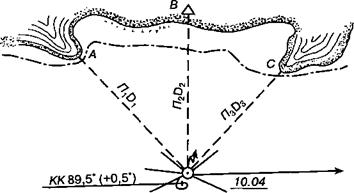 Рис. 23.1. Определение места судна по радиолокационным расстояниям
Рис. 23.1. Определение места судна по радиолокационным расстояниям
|
В практике судовождения точечные ориентиры встречаются редко. Поэтому для определения места судна используются пространственные ориентиры. К ним относятся объекты, изображения которых на экране РЛС и карте имеют размеры и их нельзя принять за точку (береговая черта, холмы, мысы, не имеющие резких очертаний, бухты, острова и т. п.).
Определение места судна по расстояниям, измеренным до нескольких ориентиров (рис. 23.1). Намечают перед определением места ориентиры на карте и быстро последовательно измеряют расстояния до них. При необходимости измеренные расстояния приводятся к од ному моменту времени.
В момент последнего измерения замечается время и отсчет лага. На карте находится обсервованное место, которое является точкой пересечения дуг окружностей, проведенных из ориентиров (учетом приведения их к одному моменту времени), как из центра с радиусами, равными измеренным расстояниям.
При выборе ориентиров необходимо следить за тем, чтобы ли нии положения пересекались под углом в пределах от 30 до 150* причем сначала измеряется расстояние до ориентира, котор близок к курсовому углу, равному 90°, а затем на ориентиры, кур совые углы которых близки к 0 или 180°.
На карте находится счислимая точка, указывается невязка, про кладывается линия пути, оформляются надписи.
Если при определении по трем расстояниям окружности не пе ресекаются в одной точке, то за обсервованное место принимается середина треугольника погрешностей. Если треугольник велик, то необходимо проверить правильность опознавания ориентиров, измерений и прокладки.
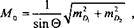
Радиальная средняя квадратическая погрешность определения места судна по расстояниям, кбт:
а) при двух ориентирах.
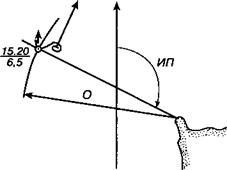
Определение места судна
По пеленгу и расстоянию.
Таким образом используя судовую РЛС можно производить определение места судна всеми доступными способами.
Контрольные вопросы:
1. Способ определения места судна с помощью круговых радиомаяков.
2. Способ определения места судна по радиомаякам.
3. Способы определения места судна по ЛОРАН-С, ДЕККА.
4. Особенности определения места судна с использованием судовой РЛС.
5. Оценка точности обсерваций с использованием радиотехнических средств.