Автоматические регуляторы мощности установок дуговых
Сталеплавильных печей
Первыми отечественными конструкциями были регуляторы типа “рeле-контактор-двигатель», с появлением электромашинных усилителейим на смену пришли регуляторы типа «генератор—двигатель» (АР, РМД). Силовые и управляющие магнитные усилители вызвали к жизни надежные и неприхотливые в обслуживании регуляторы АРДМ-М, получившие распространение на ДСП емкостью до 6-т. Значительное улучшение показателей ДСП было достигнуто благодаря переходу на гидропривод перемещения электродов (серия печей емкостью 6, 12, 25, 50 и 100т) с регуляторами АРДГ. Наиболее совершенным регулятором, удовлетворяющим современным требованиям, является тиристорный регулятор АРДМТ, применяющийся на всех ДСП с электромеханическим приводом электродов.
Дальнейшее совершенствование регуляторов мощности ДСП ведется по пути увеличения эксплуатационной надежности и реализации заложенных в тиристорном и электрогидравлическом регуляторах резервов быстродействия, точности за счет введения корректирующих связей, применения принципов адаптивного управления, создания принципиально новыхсхем привода перемещения электродов. Значительный эффект, как показал опыт, дает применение новых малоинерционных двигателей.
В качестве критерия сравнительной оценки качества регулирования мощности успешно используется дисперсия тока, тесно связанная с основными технико-экономическими показателями работы ДСП.
Расчеты и результаты опросов специалистов показывают, что главными источниками эффекта от применения новых регуляторов являются:
сокращение численности персонала; уменьшение эксплуата-ционных расходов, связанных с ремонтом и наладкой; повышение скорости перемещения электродов и чувствительности регулятора.
В промышленных регуляторах мощности ДСП, описанных ниже (РМД, АРДМ-М, АРДМТ, АРДГ) использован опыт создания ряда других разработанных ранее регуляторов (АР, ЭММ, ЭМТ, РБС, ЭГР, АРАД и др).
Регуляторы РМД и АРДМ-М-2,2 изготавливаются харьковским предприятием «Укрэлектроремонт», регулятор АРДМТ—Чебоксарским электроаппаратным заводом и регулятор АРДГ — Новосибирским заводом электротермического оборудования.
Принципы построения САУ перемещением электродов
Основной задачей САУ перемещением электродов является стабилизация в определенных пределах длины дуги и вводимой в печь мощности.
Выбор параметров регулирования является одним из важнейших вопросов разработки САУ. Так как измерение длины дуги физически невозможно, применяются косвенные параметры, которые выбирают, исходя из следующих условий:
наличие достаточно тесной и монотонной функциональной связи параметра с длиной дуги;
возможность автоматического зажигания дуги при ее обрывах и пуске печи;
максимально возможная автономность управления фазами печи;
простота, точность и надежность датчиков и входных устройств.
В качестве параметров регулирования применяется ток печи, напряжение дуги и дифференциальный параметр А, равный:

Нетрудно заметить, что при специальном подборе коэффициентов  и
и  дифференциальный параметр при малых отклонениях пропорционален сопротивлению дуги
дифференциальный параметр при малых отклонениях пропорционален сопротивлению дуги

Все три параметра функционально связаны с длиной дуги и мощностью печи (при стабильном вторичном напряжении трансформатора) и могут обеспечить эффективную стабилизацию режима. Наиболее доступным для измерения параметром является ток, что является его серьезным преимуществом. Однако токовые регуляторы неспособны обеспечить автоматическое функциони-рование печи. Рассмотрим процесс пуска печи. При включении высоковольтного выключателя электроды пойдут вниз под воздействием опорного напряжения. Когда один из них коснется шихты, ток в нем не появится, так как печь питается по трехфазной схеме без нулевого провода. Ток появится только тогда, когда коснется металла второй электрод. До этого момента механизм первого электрода будет пытаться перемещать электрод вниз с вероятной его поломкой или погружением в жидкий металл при пуске с жидкой ванной и неизбежным ее науглероживанием. Аналогично действует регулятор и при отключении печи. Все три электрода пойдут вниз, если не предусмотрено специальное устройство, отключающее при этом опорное напряжение. В связи с этими недостатками в настоящее время токовые регуляторы на ДСП не применяются.
Без специальных мер не может обеспечить работоспособность печи и регулятор по напряжению. При пуске электроды под воздействием опорного напряжения идут вниз. При касании шихты одним электродом, например фазы А, напряжение Ua становится равным нулю из-за перемещения нулевой точки в точку А (рис. 22.1,б). Однако при этом регулятор сразу поднимает электрод, разрывая его контакт с шихтой. Регулятор будет производить колебательное перемещение электрода около шихты, пока случайно моменты касания двух электродов не совпадут. Для предотвращения этого явления необходимо вводить сигнал по току, запрещающий подъем электрода при его отсутствии. Аналогично при отключении печи при отсутствии блокировки по току электроды будут подниматься вверх.
По-иному проходит пуск печи с дифференциальным регулятором. При отсутствии тока регулятор опускает электрод под воздействием не опорного, а фазного напряжения. В связи с этим при касании металла электрод остановится, так как при этом отсутствуют сигналы и по току, и по напряжению (рис. 22.1,б). При касании второго электрода в обоих электродах появляется ток двухфазного КЗ, в связи с чем оба электрода на повышенной скорости пойдут вверх, зажигая дуги (рис. 22.1, в).

Рис. 22.1. Векторные диаграммы фазных токов и напряжений в нормальном режиме (а), однофазном (б) и двухфазном (в) замыкании электродов на шихту и при несимметричном (г) режиме
В это же время из-за увеличенного фазного напряжения третий электрод увеличит свою скорость движения вниз. Поэтому автоматический пуск печи проходит без затруднений и за минимальное время. При отключении печи пропадают и токи, и напряжения, поэтому электроды останавливаются.
Важным вопросом является автономность регулирования фаз. В ДСП ввиду электромагнитной связи между элементами токоподвода и совместного изменения фазных напряжений из-за смещения нулевой точки печи изменение тока в одном электроде приводит к изменению электрического режима других фаз. Это приводит к паразитным перемещениям электродов, которые особенно значительны при работе токовых регуляторов, так как при увеличении тока в одной из фаз токи в других тоже увеличатся (рис. 22.1, г). Однако при этом увеличиваются и фазные напряжения из-за перекоса звезды напряжений. Поэтому дифференциальный регулятор дает меньше паразитных перемещений электродов.
Идеальный регулятор по напряжению дуги обеспечивает полную автономность работы регуляторов электродов. Однако точно измерить напряжение дуги во время плавки очень сложно. Непрерывный контроль Ud может быть осуществлен методом аналогового моделирования электрической цепи ДСП с контролем производных тока. Мгновенное значение напряжения дуги определяется по формуле

где L, М — индуктивность и взаимная индуктивность фаз;
1 - 3 — номера фаз.
Расчет по приведенной формуле реализуется с помощью суммирующего усилителя с четырьмя входами, коэффициенты передачи по которым подбираются экспериментально при настройке схемы. Напряжение на выходе усредняется и фильтруется для получения сигнала, пропорционального Ud. Такое прецизионное устройство снижает надежность работы регулятора, и поэтому регуляторы по напряжению дуги пока распространения не получили.
Дифференциальный регулятор в отличие от регулятора по напряжению имеет простые и надежные входные устройства. Все перечисленные качества обеспечили дифференциальному регулятору повсеместное применение на ДСП. Определенным его недостатком является значительное влияние питающего напряжения на мощность печи. В то же время нестабильность напряжения практлчески слабо влияет на длину дуги.
Принципы построения регулятора перемещения электрода иллюстрируются функциональной схемой (рис. 22.2). Блок формирования параметра БФП, состоящий из двух датчиков ДТ и ДН и схемы сравнения СС, формирует дифференциальный параметр и его отклонение от заданного значения. Последнее поступает на регулирующее устройство РУ, где преобразуется в соответствии с законом управления и предварительно усиливается. Двигатель электрода ДЭ получает напряжение от силового усилителя СУ и перемещает электрод посредством механизма МПЭ. Для обеспечения заданного качества регулирования в регулятор с помощью блока корректирующих обратных связей БКОС вводятся корректирующие обратные связи. В разных системах применяются различные обратные связи.
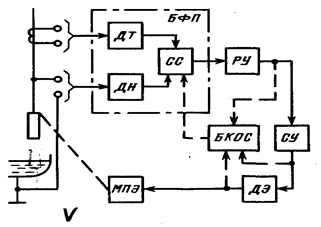
Рис. 22.2. Функциональная схема одной фразы регулятора перемещения электрода
В промышленности работает большое число локальных САУ ДСП. Они различаются в основном типом силового усилителя. (На старых ДСП применяются регуляторы с электромашинными усилителями типа РМД, магнитными усилителями типа АРДМ-М и др. Они имеют низкие технические характеристики и не выпускаются промышленностью. В настоящее время серийно изготовляются электромеханические тиристорные регуляторы типа АРДМ-Т и

Рис. 22.3. Принципиальная схема блока формирования дифференциального параметра
электрогидравлические типа АРДГ, которые подробно рассматриваются ниже.
Вне зависимости от типа регулятора блок БФП в них примерно одинаков (рис. 22.3). Он получает сигнал, пропорциональный току от трансформаторов тока ТА, для печей средней и большой емкости, установленных на стороне высокого напряжения трансформатора. Сигнал фазного напряжения в режиме холостого хода формируется искусственной звездой сопротивлений (обычно используются вольтметры), нулевая точка которой соединена с кожухом печи. Сигналы тока и напряжения подаются на потенциометрическую схему сравнения, состоящую из сопротивлений, с помощью которой получают сигнал управления

Иначе: Наилучшим параметром регулирования оказалось полное сопротивление фазы Zд, полученное на основании измерения тока дуги и напряжения фазы.

где a и b – постоянные коэффициенты, зависящие от коэффициентов трансформации измерительных трансформаторов и регулировочных сопротивлений, которые подбирают при настройке вручную.
 – заданное и текущее значение полного сопротивления дуги.
– заданное и текущее значение полного сопротивления дуги.
Таким образом, регулятор в данном случае поддерживает постоянным полное сопротивление фазы Zд =const.)
Коэффициенты k1 и k 3, неизменны во время работы печи. Коэффициент k2, реализуется с помощью переменного сопротивления, управляемого с помощью блок-контактов переключателя ступеней напряжения ПСН (см. рис. 22.3), и равен коэффициенту трансформации силового трансформатора на данной ступени напряжения.
Коэффициент k4=R3/R4 реализует задание регулятора по току и позволяет обеспечить баланс схемы сравнения при различных заданиях тока печи. Необходимо отметить, что в окрестности заданного режима отклонения напряжения невелики и составляют менее 2%. В связи с этим при малых изменениях режима регулятор фактически работает как токовый, реализуя свои возможности дифференциального регулятора при больших отклонениях режима. Поэтому и задание регулятору задается в долях номинального тока.
Сопротивление R1 защищает ТА от режима холостого хода,R2 ограничивает ток в измерительной цепи. Цепи напряжения защищаются плавкими предохранителями F. Измерительные цепи напряжения регулятора защищены с помощью разделительного трансформатора Т. Переключатель S отключает измерительные цепи при переходе на ручное управление.
Автоматический регулятор мощности на тиристорах
Регулятор АРДМТ обеспечивает работу трех рабочих каналов (по одному на фазу) и имеет один резервный канал регулирования мощности ДСП. Наименование регулятора расшифровывается следующим образом: А—автоматический, Р—регулятор, Д—дуги, М—механическая передача, Т—тиристорный. Две следующие цифры — мощность двигателя перемещения электрода и исполнение пульта управления: 01—1 кВт; шкафное исполнение; 03—3,2 кВт, шкафное исполнение;11—11 кВт, исполнение для работы сидя. Далее следует условное обозначение климатического исполнения У или Т по ГОСТ 15150-69 и цифра, соответствующая категории размещения по тому же ГОСТ.
В автоматическом режиме регулятор имеет пропорциональную характеристику при перемещении электродов вниз со скоростью не менее 2 м/мин и релейно-пропорциональную — при перемещении электродов вверх со скоростью не менее 5 м/мин; с регулируемой зоной нечувствительности от 3 до 10%. Регулятор обеспечивает возможность изменения задаваемой мощности в пределах 20—125%.
Основные технические данные регуляторов АРДМТ-01У4 (Т4), АРДМТ-ОЗУ4 (Т4) и АРДМТ-11У4 (Т4):
Питающая сеть... 380 В., 50 Гц.
Двигатель перемещения электродов:
постоянное напряжение... 220 В.
возбуждение независимое... 220 В.
мощность:
АРДМТ-01У4 (Т4)... До 1 кВт.
АРДМТ-ОЗУ4 (Т4)... До 3,2 кВт.
АРДМТ-11У4 (Т4)... До 11 кВт.
Напряжение на входе регулятора... 110—150 В.
Ток на входе регулятора... 5 А.
Габариты щитов шкафа управления … 850Х600Х240 мм.
Масса щитов... До 700 кг.
Габариты пульта... 1606Х745Х1150 мм.
Масса пульта:
для работы стоя... До 300 кг.

для работы сидя... До 200 кг.
Рис.22.4 Электрическая схема регулятора АРДМТ (на одну фазу)
Регулятор работает по принципу поодержаня определенного соотношения между напряжением и током фазы, соответствующего заданной мощности, вводимой в ДСП.
На мост сравнения поступает сигнал с датчика тока через разделительный трансформатор Тр1 и выпрямитель В1 и сигнал, пропорциональный напряжению фазы, через разделительный трансформатор Тр2 и выпрямитель В2. Сигнал рассогласования  , алгебраически складываясь с сигналами задания и обратной связи по напряжению двигателя, усиливается в БУ в качестве управляющего воздействия
, алгебраически складываясь с сигналами задания и обратной связи по напряжению двигателя, усиливается в БУ в качестве управляющего воздействия  , поступает в блок питания и управления БПУ, управляющий работой системы импульсно-фазового управления СИФУ1 или СИФУ2 в зависимости от знака управляющего воздействия. Фаза отпирающих импульсов, формируемых в СИФУ и управляющих силовым вентильным блоком СВБ, определяет ток якоря двигателя перемещения электрода ДЭ и, следовательно, скорость перемещения электрода. Блок токоограничения ТО задает пусковой ток двигателя ДЭ.
, поступает в блок питания и управления БПУ, управляющий работой системы импульсно-фазового управления СИФУ1 или СИФУ2 в зависимости от знака управляющего воздействия. Фаза отпирающих импульсов, формируемых в СИФУ и управляющих силовым вентильным блоком СВБ, определяет ток якоря двигателя перемещения электрода ДЭ и, следовательно, скорость перемещения электрода. Блок токоограничения ТО задает пусковой ток двигателя ДЭ.
Небольшие отклонения электрического режима печи от заданного регулятор отрабатывает в пропорциональном режиме, когда скорость перемещения электрода определяется разностью сигналов задания и обратной связи по напряжению двигателя. При больших возмущениях, например при к. з. электрода, сигнал обрат-ной связи ограничен стабилитроном Ст.; при этом регулятор обеспечивает максимальную скорость перемещения электрода.
После отработки возмущения обратная связь по напряжению двигателя обеспечивает интенсивное торможение системы «двигатель — электрод», за время которого электрод проходит не более 1/3 длины дуги.
Регулятор состоит из щита шкафов управления и пульта управления (шкафного исполнения - в АРДМТ-01У4 и исполнения для работы сидя - в АПДМТ-11У4).На пульте установлены аппаратура управления регулятором и электропечным трансформатором, контрольно-измерительные приборы и сигнальные лампы. В пульте управления шкафного исполнения, кроме того, установлен трансформатор питания регулятора. Пульт управления шкафного исполнения можно располагать непосредственно на рабочей площадке печи.