Назначение САРД.
Под автоматическим регулированием давления понимают плавное изменение давления путем изменения характеристик насосных агрегатов или характеристик трубопровода.
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------

----------------------------------------- ------------------------------
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------

-------------------------------------- ------------------------------------
-------------------------------------- ------------------------------------
-----------------------------------
-----------------------------------
САРД МНС должна выполнять функции:
1.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
2.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Точность поддержания усредненного значения давления должна быть
_____________________________________________________________
Блок-схема САР давления НПС.

____________________________________________________________________________________________________________________________________________________________________________________________________________________________
__________________________________________________________________________
______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
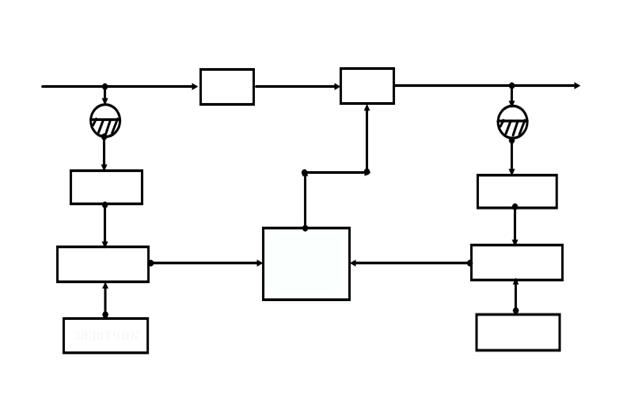
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Переходный процесс, динамические показатели и критерии качества САР.
Состояние САР, когда регулируемая величина остается неизменной во времени, является состоянием равновесия.
________________________________________________________________________
Возмущение - это событие, которое приводит к изменению регулируемой величины.
________________________________________________________________________
Под действием возмущения происходит отклонение регулируемой величины от заданного значения. Состояние равновесия нарушается, и начинается процесс его восстановления.
Переходным процессом_______________________________________
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Переходный процесс зависит от свойств САР, образующих ее элементов и может быть представлен в графическом виде.
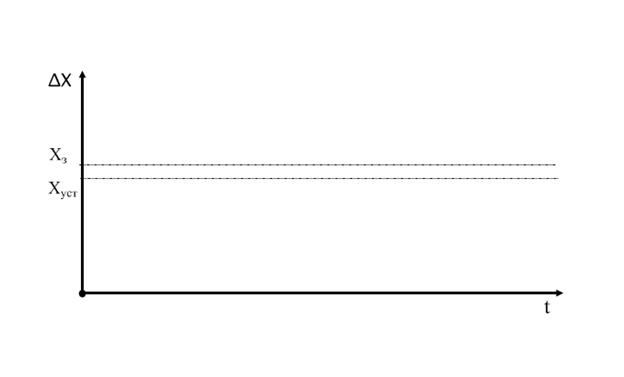
Динамические показатели системы определяются характером переходных процессов. Все процессы должны быть устойчивыми, т.е. со временем отклонения от заданного значения стремятся к постоянной величине и иметь характер затухающих колебаний.
Для характеристики переходного процесса и оценки его качества используются следующие динамические показатели:
1. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
2. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
3. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
4. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
5. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Затухание колебательных процессов численно определяется логарифмическим декрементом затухания. Эта величина представляет собой логарифм отношения первой наибольшей амплитуды отклонения ΔХmax 1 к амплитуде следующего отклонения ΔХmax 2 того же знака.
САР будет идеальной, если она будет точно поддерживать или повторять заданную величину без переходных процессов.
Вывод: ______________________________________________________
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Законы регулирования. Классификация регуляторов.
Достижимое качество процесса регулирования в значительной мере зависит от характеристик применяемых регуляторов.
 | |
| |
| |
| |
|

 Основные типы регуляторов:
Основные типы регуляторов:
1. П-регулятор___________________________________________________
2. И-регулятор___________________________________________________
3. ПИ-регулятор_________________________________________________
_____________________________________________________________
4. ПД-регулятор_________________________________________________
_____________________________________________________________
5. ПИД-регулятор_______________________________________________
__________________________________________________________________________________________________________________________
Первые два регулятора в своей работе используют по одному закону регулирования, следующие два регулятора в своей работе используют по два закона регулирования, а последний - три закона регулирования.
Очевидно, что ПИД-регулятор будет выполнять более качественное регулирование, но его применение должно быть экономически обоснованным, т.к. он дороже и сложнее, чем другие регуляторы.
 | |
| |
| |
| |
|
5. Пропорциональный регулятор.
П-регулятор, у которого________________________________________
____________________________________________________________________________________________________________________________________
 |
Кр
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.
Преимущества:________________________________________________
____________________________________________________________________________________________________________________________________
Недостатки:_______________________________________________________________________________________________________________________________________________________________________________________
Примеры:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Интегральный регулятор.
И-регулятор, у которого________________________________________
____________________________________________________________________________________________________________________________________
 |
Ти________________________________________________________________
__________________________________________________________________
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.
Преимущества:________________________________________________
____________________________________________________________________________________________________________________________________
Недостатки:_______________________________________________________________________________________________________________________________________________________________________________________
Примеры:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Пропорционально-интегральный регулятор.
ПИ-регулятор, у которого_______________________________________
______________________________________________________________________________________________________________________________________________________________________________________________________
 |
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.
ПИ-регулятор сочетает одновременно свойства пропорционального и интегрального регуляторов.
ПИ-регуляторы конструктивно более сложны, чем П- и И-регуляторы, требуют более сложной наладки, так как она осуществляется настройкой двух параметров.
Преимущества:________________________________________________
____________________________________________________________________________________________________________________________________
Недостатки:_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________