Привод подъема по системе Г – Д получил распространение на горных предприятиях большой производственной мощности, где мощность подъемного двигателя превосходит 1000 – 1200 кВт. Одно из преимуществ привода по системе Г – Д связано с наличием приводного синхронного электродвигателя, который позволяет отдавать реактивную мощность в сеть и тем самым существенно улучшать средневзвешенный коэффициент мощности подъемных установок.
На рис. 6.6 показана функциональная схема системы Г – Д. Система автоматического управления скоростью электродвигателя выполнена по принципу подчиненного регулирования координат. Возбуждение генератора осуществляется от реверсивного тиристорного возбудителя ТВГ, возбуждение двигателя – от нереверсивного тиристорного возбудителя ТВД.
Система Г – Д содержит три большие постоянные времени: постоянную времени обмотки возбуждения, электромагнитную и электромеханическую постоянные времени электродвигателя. Поэтому система управления скоростью выполнена трехконтурной. Внутренний контур образован отрицательной обратной связью по напряжению генератора, средний – отрицательной обратной связью по току якоря электродвигателя, внешний – отрицательной обратной связью по скорости электродвигателя. Каждый контур содержит один ПИ-регулятор: регулятор напряжения РН, тока РТ и скорости PC.
Датчики ДТ и ДН служат для согласования по величине сигналов управления и гальванической развязки маломощных цепей управления и силовых цепей.
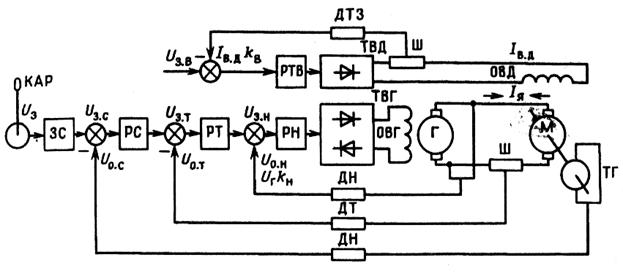
Рис. 6.6. Функциональная схема системы Г – Д с ТВ и системой подчиненного
Регулирования координат
На вход регулятора скорости PC поступает разность сигналов задания скорости  и обратной связи по скорости
и обратной связи по скорости  . Задание уровня скорости привода машины осуществляется машинистом воздействием на рукоятку сельсинного командоаппарата КАР на пульте управления. Скачкообразный сигнал с выхода КАР поступает на вход задатчика скорости ЗС, который формирует на выходе заданную диаграмму скорости в функции времени. Возбуждением электродвигателя управляет замкнутая система управления по току возбуждения электродвигателя. Задание номинального тока возбуждения
. Задание уровня скорости привода машины осуществляется машинистом воздействием на рукоятку сельсинного командоаппарата КАР на пульте управления. Скачкообразный сигнал с выхода КАР поступает на вход задатчика скорости ЗС, который формирует на выходе заданную диаграмму скорости в функции времени. Возбуждением электродвигателя управляет замкнутая система управления по току возбуждения электродвигателя. Задание номинального тока возбуждения  осуществляется подачей напряжения
осуществляется подачей напряжения  от независимого стабилизированного источника напряжения на вход ПИ-регулятора тока возбуждения РТВ. Обратная связь по току возбуждения снимается с шунта Ш и через датчик тока ДТЗ подается на вход РТВ.
от независимого стабилизированного источника напряжения на вход ПИ-регулятора тока возбуждения РТВ. Обратная связь по току возбуждения снимается с шунта Ш и через датчик тока ДТЗ подается на вход РТВ.
Система Г – Д с ТВ и подчиненной системой регулирования координат обладает динамическими свойствами, позволяющими с высокой степенью точности выполнить заданную диаграмму скорости. Применение ПИ-регулятора скорости позволяет получить высокую точность остановки.
Система Г – Д обладает определенными недостатками. Одним из наиболее существенных, ограничивающих применение привода, является наличие электромашинного преобразовательного агрегата для преобразования электроэнергии переменного тока в управляемую электроэнергию постоянного тока. Его установленная мощность в 2,5 – 3 раза превышает мощность регулируемого двигателя постоянного тока. Для установки электромашинного преобразователя требуется специальный фундамент. Из-за потерь электроэнергии в приводном двигателе и генераторе Г система Г – Д имеет низкий КПД, обычно не превышающий 0,8, что увеличивает расход электроэнергии. Наличие вращающихся частей и коллектора в электромашинном преобразователе снижает надежность работы привода. Дополнительное обслуживание приводного двигателя и генератора обусловливает увеличение эксплуатационных расходов.
Так же, как и для многих других производственных механизмов, в отечественной и зарубежной практике для шахтных подъемных машин широкое распространение получил электропривод по системе ТП – ДПТ. Применение системы ТП – ДПТ позволяет по сравнению с системой Г – Д сократить капитальные затраты, уменьшить массу и габариты электрооборудования, снизить расходы меди. Так как отсутствует электромашинный преобразователь, то система ТП – ДПТ обладает более высоким КПД, чем система Г – Д. Привод по системе ТП – ДПТ при правильном выборе тиристоров является более надежным в эксплуатации, прежде всего за счет исключения вращающихся частей преобразователя.
Высокое быстродействие ТП, систем управления дает возможность получать требуемые динамические характеристики привода. Незначительная мощность сигналов управления на входе ТП позволяет использовать маломощные управляющие устройства и проще реализовать сложные законы управления.
Однако системе ТП – ДПТ присущи следующие недостатки по сравнению с системой Г – Д: более низкий коэффициент мощности, искажение формы напряжения сети, пульсации выпрямленного тока. Это все приводит к дополнительным потерям электроэнергии. Для устранения этих недостатков необходимо применять специальные меры: устанавливать на стороне переменного тока фильтрокомпенсирующие устройства (ФКУ), улучшающие коэффициент мощности и снижающие уровень высших гармоник в напряжении сети; включать на стороне постоянного тока сглаживающий реактор, уменьшающий пульсации выпрямленного тока.
Для получения требуемых динамических и статических характеристик тиристорного электропривода постоянного тока применяется система подчиненного регулирования координат. Использование ПИ-регулятора скорости позволяет исключить статическую ошибку при движении подъемного сосуда, получить высокую точность остановки. Задатчик скорости дает возможность сформировать требуемую диаграмму скорости. Замкнутая система подчиненного регулирования координат обеспечивает точное выполнение заданной диаграммы независимо от величины и знака нагрузки.