С применением метода наименьших квадратов тесно связан вопрос о так называемом сглаживании экспериментальных зависимостей. Пусть производится опыт, целью которого является исследование зависимости некоторой физической величины Υ от физической величины X, причем предполагается, что Υ и X связаны функциональной зависимостью Υ = φ(Χ).
В результате наблюдений получены пары чисел
(xiyi) (i = 1, 2,..·, n).
О форме зависимости судят, исходя из существа задачи, или по внешнему виду экспериментальной зависимости. Например, экспериментальные точки, изображенные на рис. 53, предполагают прямолинейную зависимость вида у = ах + b, а на рис. 54 - полином второй степени у = ах2 + bх + с. В общем случае можно говорить
Рис. 53

Рис. 54

Рис. 55
о подборе полинома степени n-1, который задает кривую, проходящую через все n точек (хi yi). Но построение такого полинома нецелесообразно, ибо существующая закономерность будет искажена случайными ошибками наблюдений. Для сглаживания случайных уклонений как раз и служит метод наименьших квадратов.
С его помощью определяют параметры а, b, с сглаживающих полиномов. Так, для прямолинейных зависимостей будем иметь уравнения (3.3) вида


………………..
 (n>2)
(n>2)
Здесь роль неизвестных играют два параметра а и b, а роль измерений li - величины у; коэффициенты при а и b образуют матрицы

Поэтому имеем систему нормальных уравнений с двумя неизвестными

Решение легко выполнить с помощью обратной матрицы
где
Отсюда
 (3.66)
(3.66)
 (3.67)
(3.67)
| Таблица 77 | |||
| Номера наблю дений | xi | yi | υi |
| 2,8 | -0,16 | ||
| 2,7 | +0,11 | ||
| 2,9 | +0,08 | ||
| 3,3 | -0,16 | ||
| 3,2 | +0,11 | ||
| 3,4 | +0,08 | ||
| 3,6 | +0,05 | ||
| 3,9 | -0,08 | ||
| 4,0 | -0,02 | ||
| 4,2 | -0,04 | ||
| Σ | 34,0 | -0,03 |
Рассмотрим пример. Пусть имеем пары наблюдений (xiyi), представленные в табл. 77 и на графике в виде точек (рис. 55).
Далее вычисляем:
[x2] = 385, [ху] = 200,9, [x2]n – [x2] = 325.
График показывает, что можно предположить функциональную зависимость у = ах + b. Согласно формулам (3.66) и (3.67) имеем


Далее вычисляем уклонения (см. табл. 77) υi=0.168xi+b-уi, и осуществляем контроль на основании (3.15) или в подробной записи [xυ] = -0,18 = 0; [υ] =-0,03 = 0.
Для оценки точности вычисляем

Согласно формуле (3.47) 
 где
где

Поэтому


Можно показать, что когда функциональная зависимость имеет вид y=ax+b, задача нахождения параметров a и b математически тождественна задаче построения уравнения регрессии, однако по существу отличается от неё, так как наличие функциональной связи предполагает, что коэффициент корреляции r = 1. Так применяя метод наименьших квадратов к задаче 2.41 получим то же уравнение регрессии y=0.63x+0.71, но говорить о функциональной связи y и x не приходится(это видно по расположению точек на графике рис. 33).
Аналогично решается задача и для подбора параметров полиномов более высокого порядка в общем виде.
3.42 Составить коэффициенты нормальных уравнений для определения коэффициентов полинома y=ax2+bх + с.
| Таблица 78 | |||||
| Номера наблюдений | xi | yi | Номера наблюдений | xi | yi |
| 1,0 | 2,2 | 7,1 | 54,9 | ||
| 2,1 | 6,0 | 7,8 | 71,0 | ||
| 3,1 | 12,4 | 9,0 | 91,0 | ||
| 3,9 | 19,2 | 10,3 | 107,8 | ||
| 5,0 | 31,0 | 10,8 | 129,7 | ||
| 6,2 | 40,8 | 12,0 | 158,3 |
3.43. Определить коэффициенты сглаживающего полинома у=ах2+bх + с по следующим результатам измерений (табл. 78) и оценить их точность.
Рассмотрим здесь еще одну специальную задачу применения параметрического способа уравнивания. Пусть выполнено n измерений одной и той же величины и получены результаты yi искаженные систематическими ошибками ic, где с = const. Требуется из результатов измерений вывести не только уравненное значение величины X, но и оценить систематическую ошибку. В этом случае уравнения поправок будут υi=δx+ic+li где li = х(0)— уi. В качестве приближенного значения можно принять х(0)= 0 или какое-то удобное для вычисления значение, близкое к yi. Так как матрица коэффициентов уравнений поправок имеет вид

то получим матрицу коэффициентов нормальных уравнений

Вектор свободных членов будет

Решение получим с помощью обратной матрицы
 (3.68)
(3.68)
по формуле
 (3.69)
(3.69)
| Τаблица 79 | |||||
| Номера приемов | Значения уi | Номера приемов | Значения yi | Номера приемов | Значения Уi |
| 90°15'27,5" 29,7 | 90°15'37,3" 33,6 | 90°15'35,5" 38,8 | |||
| 29,7 30,9 | 31,7 33,2 | 33,3 32,1 | |||
| 34,6 | 37,9 | 38,7 | |||
| 34,1 | 34,9 | 39 1 | |||
| 31,3 | 35,3 | 39,4 | |||
| 33,5 | 27,2 | 39,9 |
Средние квадратические ошибки

Где
 (3.70)
(3.70)
Рассмотрим следующий пример. В табл. 79 даны 24 измерения зенитного расстояния на одном из пунктов триангуляции*.
Предполагая, что измерения выполнялись равномерно во времени и влияние систематической ошибки пропорционально времени, получить наиболее надежное значение измеренного угла, оценку систематической ошибки с и оценить точность измерений и результатов.
Решение. В качестве приближенного значения х(0) примем величину х(0)=90°15'20". Тогда найдем

Матрица (3.68)
поэтому решение (3.69)


По смыслу задачи это будет наиболее надежное значение угла, отнесенного к начальному моменту измерений.
Для величины  опуская здесь вычисления, согласно формуле (3.70) найдем
опуская здесь вычисления, согласно формуле (3.70) найдем

Поэтому точность измерений характеризуется средней квадратической ошибкой
а ошибки


Заметим, что если решать эту задачу, не предполагая наличия систематических ошибок, то получим
 = 90°15'34,3"
= 90°15'34,3"
и m = 3,72", не соответствующую точности измерений данным теодолитом.
3.44. Доказать, что если в каждом измерении одной и той же величины систематическая ошибка постоянна, то ее невозможно выявить рассмотренным способом, а величина m не будет искажена систематическим влиянием.
3.45. Составить матрицу коэффициентов нормальных уравнений, если систематическая ошибка действует по законам: 1) (i + b)с, 2) i2с, 3) аi2с, приняв n= 5.
3.46. С помощью таблицы случайных чисел (прил. XI) смоделировать ошибки n = 10 измерений со стандартом σ = 2 и с = 1, если систематические ошибки действуют по закону ic, где i - номер измерения. Получить оценку для систематической ошибки, оценить точность ее определения и точность измерений.
3.47. Сделать то же самое, если закон действия систематических ошибок φ(с) = c sin αj, где αj = αj-1 + 1°
§ 34. УРАВНИВАНИЕ НЕРАВНОТОЧНЫХ ИЗМЕРЕНИЙ ПАРАМЕТРИЧЕСКИМ СПОСОБОМ
Уравнивание неравноточных измерений выполняется под условием [ρυυ]= VTPV = min, где pi - веса измерений, а Р - диагональная матрица,
Вопрос установления весов pi был нами рассмотрен в § 24. Исходная система связи и уравнения поправок составляются так же, как и в случае равноточных измерений, но в отличие от него система нормальных уравнений имеет вид
 (3.71)
(3.71)
где алгоритмы


…………………………………….

………………………………….

В матричной форме уравнения (3.71) можно записать в виде
 (3.72)
(3.72)
где
 (3.73)
(3.73)
 (3.74)
(3.74)
Процесс вычислений при уравнивании неравноточных измерений, следовательно, отличается от уже рассмотренного случая лишь схемой составления нормальных уравнений. При этом можно поступить двояко: 1) привести неравноточные измерения к равноточным путем умножения i-го уравнения поправок на величину  2) нормальные уравнения составлять непосредственно по формулам (3.13) и (3.14).
2) нормальные уравнения составлять непосредственно по формулам (3.13) и (3.14).
В первой схеме (А) будем иметь систему уравнений поправок


…………………………………..

Где





и систему нормальных уравнений
совпадающую с (3.72). Ясно, также, что [ρυυ] = [  ]. Схема составления системы нормальных уравнений будет состоять из следующих двух таблиц (табл. 80, 81). Для простоты принято k = 3.
]. Схема составления системы нормальных уравнений будет состоять из следующих двух таблиц (табл. 80, 81). Для простоты принято k = 3.
Во второй схеме (В), которую применяют чаще, приходится составлять следующие таблицы (табл. 82 и 83).
| Таблица 80 | ||||||
| Номера измерении | ai bi ci li | si | 
| 
| 
| 
|
| 1 2 | a1 b1 c1 l1 a2 b2 c2 l2 ………… an bn cn ln | s1 s2 … s3 |  …
…

|  ……..
……..

|  …
…

|  …
… 
|
| Таблица 81 | |||

| |||

| 
| Контроль | |
| Таблица 83 | |
|
| |
| Контроль |
| Таблица 82 | ||||||
| Номера измерений | ai bi ci li | si | pi | ai pi bi pi ci pi li pi | sipi | υi |
| … n | a1 b1 c1 l1 a2 b2 c2 l2 …………….. an bn cn ln | s1 s2 … sn | p1 p2 …. pn | a1 p1 b1 p1 c1 p1 l1 p1 a2 p2 b2 p2 c2 p2 l2 p2 ………………………………….. an pn bn pn cn pn ln pn | s1p1 snp2 … snpn | υ1 υ2 … υn |
Решение нормальных уравнений, оценка точности неизвестных и их функций выполняется точно так же, как и в случае равноточных измерений. Следует лишь иметь в виду, что во всех формулах, относящихся к этому процессу, в алгоритмах Гаусса с двумя буквами добавляется буква р.
3.48. Уравнять параметрическим способом нивелирную сеть, представленную на рис. 56 (исходные данные приведены ниже), а результаты измерений - в табл. 84.
| Таблица 84 | |||
| Номера ходов | Превышение hi, м | Длина хода Li, км | 
|
| +6,135 | 33,0 | 1,21 | |
| +8,343 | 33,9 | 1,17 | |
| +5,614 | 30,4 | 1,31 | |
| + 1,394 | 32,7 | 1,22 | |
| -6,969 | 31,8 | 1,25 | |
| -0,930 | 29,9 | 1,34 | |
| +6,078 | 34,5 | 1,15 |
Марки Высоты исходных
марок, м
А 183,506
В 192,353
С 191,880

Рис. 56
Решение. Приближенные значения высот реперов получаем так:



Составляем уравнения поправок:

| Таблица 85 | |||||||
| Номера уравнений | |||||||
| + 1 | 0,0 | + 1,0 | 1,21 | -2,64 | |||
| - 1 | + 1 | - 1,7 | - 1,7 | 1,17 | +0,08 | ||
| + 1 | 0,0 | + 1,0 | 1,31 | -0,85 | |||
| -1 - | + 1 | -8,5 | -8,5 | 1,22 | -2,69 | ||
| - 1 | + 1 | -4,8 | -4,8 | 1,25 | -0,77 | ||
| + 1 | 0,0 | + 1,0 | 1,34 | +3,17 | |||
| + 1 | +0,9 | + 1,9 | 1,15 | +0,05 | |||
| - 1 | +2 | +3 | -14,1 | - 10,1 | |||
| δxj Контроль | -2,64 0,00 | -0,85 0,01 | +3,17 -0,01 | [ρυυ] = 32,42 |
| Таблица 86 | |||||||||
| a] | b] | с] | l] | s] | Контроль | F1 | F2 | Σ | SQ |
| [pa +3,60 [pb [pc [pl [ps | - 1,17 +4,88 | -1,22 -1,25 +3,81 | +12,36 +5,05 -16,37 + 121,9 | + 13,57 +7,51 -15,03 + 122,30 +128,35 | + 13,57 7,51 - 15,03 122,30 128,35 | + 1,00 | 1,00 -1,00 | +2,21 +3,46 +0,34 1,00 | 12,97 6,61 -16,03 |
| Σ1=[as]-[al]+(f1)1+(f1)2 Σ2=[bs]-[bl]+(f2)1+(f2)2 Σ3=[cs]-[cl]+(f3)1+(f3)2 |
Свободные члены выражены в сантиметрах.
Веса измерений вычисляем по формуле pi= 40/Li.
В табл. 85 и 86 приведены коэффициенты уравнений поправок и нормальных уравнений.
В качестве оцениваемых функций выбраны превышения по ходам 1 и 5. Для первой функции F1 коэффициенты f1 = 1, f2 = 0, f3 = 0, для второй f1 = 0, f2 = 1, f3 = - 1. В столбце Σ табл. 86 два последних числа равны соответственно [f]1 = 1 и [f]2 = 0.
Решение системы нормальных уравнении приведено в табл. 87.
В результате проведенного решения получены следующие значения неизвестных:
X1 = 189,641 м - 2,64 см = 189,615 м;
Х2= 197,967 м - 0,85 см = 197,953 м;
х3= 190,950 м + 3,17 см = 190,981 м.
Средние квадратические ошибки единицы веса и на 1 км хода равны:


Вес последнего неизвестного равен

Вес первого неизвестного получен дважды

Вес предпоследнего неизвестного


Средние квадратические ошибки:



После введения поправок в измеренные величины получим




| Таблица 87 | ||||||||||||||
| δx1 | δx2 | δx3 | l | S | Контроль 1 | Q1 | Q2 | Q3 | Qs | Контроль 2 | F1 | F2 | Σ | Контроль 3 |
| +3,60 (0,2778) (-1) | - 1,17 +0,325 | -1,22 +0,339 | + 12,36 -3,433 | + 13,57 -3,769 | + 13,57 -3,769 | - 1,00 +0,278 | +12,57 -3,492 | 12,57 -3,491 | + 1,00 -0,278 | +2,21 -0,614 | +2,21 -0,614 | |||
| (0,2222) | 4,50 (-1) | -1,65 +0,366 | +9,071 +2,015 | 11,92 -2,649 | + 11,92 -2,649 | -0,32 +0,072 | - 1,00 +0,222 | + 10,60 -2,355 | + 10,60 -2,355 | +0,32 -0,072 | + 1,00 -0,222 | +4,18 -0,929 | +4,17 -0,928 | |
| (0,3571) | +2,80 | -8,86 +3,171 | -6,07 +2,172 | -6,06 +2,171 | -0,46 +0,164 | -0,37 +0,131 | - 1,06 +0,357 | -7,89 +2,818 | -7,90 +2,823 | +0,46 -0,164 | -0,63 +0,227 | +2,62 -0,936 | +2,63 -0,937 | |
| 32,44 | 32,44 32,44 | 

| +0,031 -0,366 | -0,345 -0,333 | -0,345 -0,335 | |||||||||
| δx1 | δx2 | δx3 | ||||||||||||
| -2,636 -3,638 | -0,855 - 1,855 | +3,171 +2,171 | ||||||||||||
| + 1,002 | 1,000 | 1,000 | ||||||||||||
| Весовые коэффициенты | ||||||||||||||
| +0,376 +0,132 +0,164 | +0,132 +0,270 +0,131 | +0,164 +0,131 +0,358 |
Окончательным контролем правильности решения задачи является выполнение равенства  для каждого хода сети.
для каждого хода сети.
Способ узлов проф. В. В. Попова для составления нормальных уравнений
Для случая уравнивания нивелирных сетей и углов в сети полигонометрии проф. В. В. Попов предложил следующие правила составления нормальных уравнений с помощью чертежа сети:
а) квадратичные коэффициенты нормальных уравнений в строке j равны сумме весов ходов, сходящихся в узле с тем же номером j;
б) неквадратичные коэффициенты, расположенные в строке i и столбце h, равны отрицательному весу хода, соединяющего узлы с номерами j и h;
в) свободные члены нормальных уравнений получаются суммированием величин ±Pili тех ходов, которые сходятся в узле j, причем если узел является конечной точкой хода, то ставится знак «+», а если начальной, то «-».
Например, для нивелирной сети (см. рис. 56) нормальные уравнения будут



а свободные члены



Указанные правила тождественны следующим формулам составления матрицы R системы нормальных уравнений (3.72) ее диагональные элементы
 (3.75)
(3.75)
(запись i  j означает здесь принадлежность i-го хода j-му узлу), а недиагональные
j означает здесь принадлежность i-го хода j-му узлу), а недиагональные
 (3.76)
(3.76)
(знак суммы предусматривает случай, когда узлы j и k соединены несколькими ходами).
Вектор свободных членов b имеет элементы
 (3.77)
(3.77)
3.49. Составить по способу В. В. Попова систему нормальных уравнений в задаче 3.48.
3.50. Выполнить параметрическим способом уравнивание сети триангуляции (рис. 57), если. в ней измерены дирекционные углы

Рис. 57
Номера дирекционных Измеренные значения
углов
1 229°30'17,9'
2 294 06 17.4
3 183 34 12,7
4 238 54 00,7
5 281 56 01,2,
матрица весов которых

Координаты исходных пунктов взять из задачи 3.36. Исходные дирекционные углы
αOA =0°; αOB = 135°40’19,5".
Приближенные значения координат определяемых пунктов примем равными приведенным ниже:
Пункт Ρ x(0) y(0)
D 623,360 - 1393,272
С - 897,701 - 1488,183
Решение. Эта задача отличается от решенной ранее задачи 3.37 лишь тем, что теперь дирекционные углы неравноточны**. Таблицы коэффициентов уравнений поправок и составления нормальных уравнений имеют вид, приведенный в табл. 88, 89.
Решение нормальных уравнений и получение матрицы весовых коэффициентов представлено в табл. 90, а вычисление поправок  ,
,  с контролем
с контролем  и
и  - в табл. 88.
- в табл. 88.
Уравненные значения координат и уравненных дирекционных углов приведены ниже.
Пункт F х(р) у(0)
D 623,376 -1393,264
С -897,721 1488,173
Номера дирекционных углов Уравненные дирекционные
1 229°30'18,6"
2 294 06 17,2
3 183 34 13,3
4 238 54 00,2
5 281 56 02,6
При уравнивании этого построения имеем всего одно избыточное измерение, поэтому вычислить ошибку единицы веса μ не представляется возможным. Однако учитывая, что в качестве измеренных углов здесь приняты предварительно уравненные углы из задачи 3.36, можно применить формулу

где через  - обозначены поправки углов, уравненных в задаче 3.36.
- обозначены поправки углов, уравненных в задаче 3.36.
| Таблица 88 | ||||||||||||||||
| ai | bi | ci | di | li | si | 
| 
| 
| 
| 
| 
| 
| Контроль | 
| 
| |
| 0,858 | -0,731 | -0,1 | 0,027 | 1,414 | 1,213 | -1,034 | -0,141 | 0,038 | 0,038 | 1,01 | 0,71 | |||||
| 1,234 | 0,552 | -2,7 | -0,914 | 2,000 | 2,468 | 1,104 | -5,400 | -a, 828 | -1,828 | -0,46 | -0,23 | |||||
| -0,084 | 1,350 | 0,084 | - 1,350 | 1,1 | 1,100 | 1,414 | -0,119 | 1,909 | 0,119 | -1,909 | 1,556 | 1..556 | 1,556 | 0,81 | 0,57 | |
| 1,018 | -0,614 | 2,2 | 2,604 | 2,000 | 2,038 | -1,228 | 4,400 | 5,208 | 5,210 | -0,95 | -0,48 | |||||
| 0,662 | 0,140 | 2,6 | 3,402 | 1,414 | 0,936 | 0,198 | 3,676 | 4,810 | 4,808 | 1,96 | 1,39 | |||||

|  Коэффициенты увеличены в 10 раз
Коэффициенты увеличены в 10 раз
|

| ||||||||||||||
| Таблица 89 | |||||||
|
|
|
|
|
|
| Контроль | |

| 7,577 | 1,243 | -0,014 | 0,227 | - 13,683 | -4,650 | -4,650 |

| 5,932 | 0,227 | -3,644 | 0,913 | 0,913 | ||

| 5,043 | -2,544 | 12,593 | 15,301 | 15,305 | ||

| 5,191 | -7,646 | -8,414 | -8,416 | |||

| 64,474 | 52,884 | 52,893 | ||||

| 56,024 | 56,034 |
| Таблица 90 | |||||||
| Вспомогательные величины | 
| 
| 
| 
| l | s | Контроль |
| (0,1320) | 7,577 (-1) | 1,243 -0,1640 | -0,014 0,0018 | 0,227 -0,0300 | -13,683 1,8056 | -4,650 0,6137 | -4,650 0,6134 |
| (0,1746) | 5,728 -1 | ■0,229 -0,0400 | -3,681 0,6426 | -0,601 0,1049 | 1,676 -0,2926 | 1,675 -0,2925 | |
| (0,1986) | 5,034 -1 | -2,296 0,4760 | 12,592 -2,5014 | 15,230 -3,0254 | 15,230 -3,0254 | ||
| (0,5965) | 1,678 (-1) | -1,628 0,9713 | 0,048 -0,0286 | 0,048 -0,0287 | |||

| 1,6398 0,6401 | 0,8106 -0,1894 | -2,0391 -3,0390 | 0,9713 -0,0286 | 6,626 | 6,623 6,611 | |
| 0,9997 | 1,0000 | 0,9999 | 0,9999 | 10-4 | |||
| 1,000 1,000 0,999 1,001 | 0,1470 - 0,0776 -0,0356 -0,0784 | -0,0776 0,4069 0,1691 0,3720 | -0,0356 0,1691 0,3337 0,2839 | -0,0784 0,3720 0,2839 0,5965 |
Тогда

Оценка точности уравненных координат выполняется по формулам




а их функций - точно так же, как и в задачах 3.36-3.38, а именно:


Поэтому


3.J51. Для условий задачи 3.50 составить нормальные уравнения, пользуясь схемой А (не приводя измерения к равноточным). Сделать выводы о преимуществе схемы А или В с точки зрения объема и точности вычислений.

Рис. 58
3.52. Выполнить уравнивание нивелирной сети, изображенной на рис. 58. Оценить точность всех узловых реперов (матрицу весовых коэффициентов
получить по способу Ганзена) и уравненного превышения hi. Обратный вес этой функции вычислить по формуле (3.49) и в дополнительном столбце схемы Гаусса. Исходные данные приведены ниже, а измеренные превышения и длины ходов даны в табл. 91. Нормальные уравнения составить дважды: по схеме В и по способу узлов проф. В. В. Попова.
Номера опорных реперов Высоты опорных реперов, м
I 188,452
II 188,838
III 186,298
3.53. Выполнить предварительное уравнивание углов в полигонометрической сети (рис. 59). Оценить точность дирекционных углов узловых направлений, совпадающих со сторонами 1-30 и 2232. Суммы измеренных левых углов в ходах и исходные дирекционные углы на рис. 59 [3].
Решение. Суммы измеренных углов в каждом ходе принимаем в качестве измеренных величин (как и превышения ходов в нивелирной сети). Веса ходов принимаем равными  , где
, где  - число измеренных углов в каждом ходе. Предполагается, что на узловых точках углы измерены отдельно друг от друга. Далее вычисляем приближенные значения дирекционных углов сторон 1-30 и 2-32 по ходам 1 и 3:
- число измеренных углов в каждом ходе. Предполагается, что на узловых точках углы измерены отдельно друг от друга. Далее вычисляем приближенные значения дирекционных углов сторон 1-30 и 2-32 по ходам 1 и 3:
 = 196°08'42,3',
= 196°08'42,3',  = 162°38'47,1".
= 162°38'47,1".
| Таблица 91 | |||||||||||
| Превышения, м | Длина хода, км | ||||||||||
| Варианты | |||||||||||
| +2,214+0,001i | 12,8 | 13,4 | 14,0 | 8,0 | 11,1 | 11,8 | 13,2 | 15,1 | 16,6 | 17,5 | |
| +1,566 | 14,2 | 14,8 | 15,5 | 8,9 | 12,3 | 13,1 | 14,6 | 16,7 | 18,3 | 19,4 | |
| -0,302 | 8,7 | 9,1 | 9,5 | 5,4 | 7,6 | 8,0 | 8,9 | 10,2 | 11,2 | 11,8 | |
| -1,881 | 12,4 | 13,0 | 13,6 | 7,7 | 10,7 | 10,4 | 12,8 | 14,6 | 16,0 | 16,9 | |
| +0,915 | 5,8 | 6,1 | 6,4 | 3,6 | 5,1 | 5,4 | 6,0 | 6,9 | 7,5 | 7,9 | |
| -2,814 | 5,1 | 5,3 | 5,6 | 3,2 | 4,4 | 4,8 | 5,2 | 6,0 | 6,5 | 6,9 | |
| -3,137 | 7,8 | 8,3 | 8,6 | 4,9 | 6,8 | 7,2 | 8,1 | 9,2 | 10,1 | 10s6 | |
| + 1,517+0,001i | 10,1 | 10,7 | 11,1 | 6,3 | 8,8 | 9,4 | 10,4 | 12,0 | 13,1 | 13,8 |
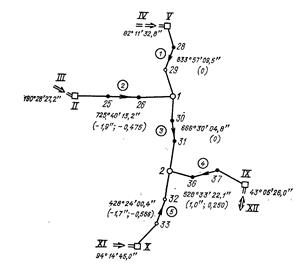
Рис. 59
Свободные члены уравнений поправок (фактически это невязки ходов, взятые с обратным знаком) вычисляем по формуле

где k - такое число, при котором выполняется неравенство  Ясно что по ходам 1 и 3 невязки равны 0. Нормальные уравнения составляем по способу узлов проф. В. В. Попова по формулам (3.75), (3.76) и (3.77) без составления уравнения поправок, так как коэффициенты перед неизвестными δα1 и δα2 как и в нивелирных сетях, равны ± 1 или 0. В общем виде нормальные уравнения будут
Ясно что по ходам 1 и 3 невязки равны 0. Нормальные уравнения составляем по способу узлов проф. В. В. Попова по формулам (3.75), (3.76) и (3.77) без составления уравнения поправок, так как коэффициенты перед неизвестными δα1 и δα2 как и в нивелирных сетях, равны ± 1 или 0. В общем виде нормальные уравнения будут

где свободные члены
Величины  и
и  приведены в скобках на рис. 59. В результате вычислений получаем систему
приведены в скобках на рис. 59. В результате вычислений получаем систему

Решая ее путем обращения матрицы, находим


Далее для углов каждого хода вычисляем величины

(


 )
)
представляющие собой поправки в суммы углов ходов. Контроль вычислений вытекает из формулы [paυ] = [pbυ] =... = 0 и приобретает вид

Соответственно для узлов 1 я 2 получаем
1) 0,207 - 0,268 + 0,060 = - 0,001,
2)- 0,060 + 0,411 - 0,351 = 0.
Поправки в углы в каждом ходе вычисляем по формуле

(здесь они не приводятся).
Далее по известным формулам вычисляем дирекционные углы всех сторон. Для оценки точности вычислим величину


Средняя квадратическая ошибка измерения одного угла
 а ошибка
а ошибка 
уравненных дирекционных углов


Коэффициент корреляции между ними 
Если на узлах углы измерены способом круговых приемов, то им следует приписать вес, равный 2, а всем остальным углам - веса, равные 1. Тогда вес суммы углов хода с одним узлом найдем, исходя из формулы

и вес
где, как и ранее, n' - число вершин хода, включая узловую точку. Для хода

Рис. 60
«от узла к узлу»  . Все вычисления аналогичны выполненным ранее стой разницей, что поправки углов на узловых точках вычисляются по формуле
. Все вычисления аналогичны выполненным ранее стой разницей, что поправки углов на узловых точках вычисляются по формуле