Лабораторная работа №3
Исследование измерительных преобразователей
Механических величин
Цель работы: исследование характеристик и принципов действия измерительных преобразователей угловых и линейных перемещений.
Измерительные преобразователи (ИП) механических величин применяются как самостоятельные приспособления для контроля положения объектов и их частей в процессе движения, так и преобразовательные элементы в других устройствах для измерения линейных и угловых перемещений. ИП механических величин можно разделить на дискретные и непрерывные. Дискретные ИП используют для контроля конечных или промежуточных положений подвижных объектов или их частей. Непрерывные ИП используют для непрерывного контроля перемещений. Среди них различают ИП линейного (поступательного) и углового (вращательного) перемещения.
Указанные ИП имеют различные статические характеристики. Статическая характеристика определяет функциональную зависимость выходной величины Y от входной Х в установленном режиме, т. е. после истечения времени, когда изменения информации, массы, энергии в звене прекратились. Аналитически статическую характеристику можно обозначить как y=f(x).
В зависимости от вида функции f, ИП делятся на линейные и нелинейные. К линейным относятся ИП, в которых статическая характеристика имеет вид Y=kx (рис1, а). Это уравнения прямой линии, которая выходит из начала координат. Величину K называют коэффициентом передачи ИП. В метрологии эту величину называют коэффициентом чувствительности. При нелинейной характеристике коэффициент K меняется в значительных пределах и определяется как K=  для соответствующего рабочего пункта А (рис. 1, б).
для соответствующего рабочего пункта А (рис. 1, б).
Для каждого преобразователя существует порог чувствительности  - это минимальное значение входной величины, которая может быть измеренная с помощью данного преобразователя. Максимальное значение входной величины, которое можно измерять с помощью преобразователя с нормированной погрешность, называется границей преобразования. Отношения границы преобразования Xм к порогу чувствительности называют диапазоном измерения D= Xм/ .
- это минимальное значение входной величины, которая может быть измеренная с помощью данного преобразователя. Максимальное значение входной величины, которое можно измерять с помощью преобразователя с нормированной погрешность, называется границей преобразования. Отношения границы преобразования Xм к порогу чувствительности называют диапазоном измерения D= Xм/ .
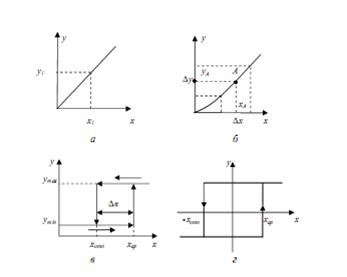
Рисунок 1 - Статические характеристики измерительных преобразователей
Дискретные ИП имеют, как правило, релейную статическую характеристику (рис. 1, в, г). У них при некотором значении плавно изменяемой входящей величины Х происходит резкое, скачкообразно изменение выходной величины Y. Причем из-за наличия в дискретных ИП зоны неоднозначности наблюдается неоднозначность хода характеристики. При непрерывном увеличении и уменьшении входной величины Х скачкообразно изменение выходного Y происходит при разных значениях Х.
В первом случае при Х = Хср (срабатывания) Y скачком меняется от Ymin до Ymax.Во втором случае при Х = Хотп (отпускания) Y меняется от Ymax до Ymin. Такие статические характеристики называются релейными. Они могут быть нереверсивными, если при уменьшении или увеличении Х величина Y не меняет знак или направление (рис. 1, в), и реверсивными, в которых при изменении направления Х меняется знак Y (рис.1, г). Для статических характеристик релейной ВП можно определить коэффициент возврата Кв= Хотп / Хср и зону возврата  .
.
К элементам с релейной характеристикой относятся различные контактные и бесконтактные конечные выключатели, электромагнитные и пневматические реле, контактные измерители уровня, температуры и др.
Дискретные ИП механических перемещений используют для получения управляющих сигналов или команд. Их можно разделить по назначению на командные и размерные, по конструкции - на контактные и бесконтактные.
Командные предназначены для получения руководящих команд в определенных точках пути перемещения элемента станка или какого-либо вспомогательного устройства и называются путевые или конечными переключателями.
Размерные преобразователи измеряют размеры деталей, которые обрабатываются, или величины перемещений рабочих органов.
В контактных при нажатии руководящего упора на приводное приспособление (шток) i выключателя подвижные контакты мостикового типа опускаются вниз. При этом замкнутые контакты размыкаются, а разомкнутые замыкаются. В пазу штока между мостиками находится пружина, которая создает контактный натиск. Вторая пружина обеспечивает самовозврат коммутирующего устройства в исходное положение после отпускания упора.
В бесконтактных выключателях управляющий сигнал вырабатывается в результате изменения параметров выходных цепей электрической схемы в результате изменения индуктивной связи между обмотками при введении между ними экрана.
Наиболее распространенными непрекращающимися ИП механических перемещений являются реостатные, электромагнитные и фотоэлектрические.
Реостатным ИП называют переменный резистор, подвижный контакт которого перемещается в соответствии с механическим перемещением детали или рабочего органа механизма. Натуральная входная величина реостатного ИП -перемещение, выходная - активное сопротивление.
Электромагнитные ИП (ЭИП) реализуют следующие основные разновидности функций преобразования:

где L - индуктивность обмотки; W1, W2 - количество витков обмоток; M -взаимная индуктивность обмоток; 1м = R,. + Rs - магнитное сопротивление магнитной цепи преобразователя; Rс - магнитное сопротивление стального стерж ня ИП; R3 - сопротивление воздушного зазора; е - электродвижущая сила (ЭДС); d<P /dt - скорость изменения магнитного потока.
В практике измерений перемещений наибольшее распространение получили дифференциально-трансформаторные преобразователи (ДТП).
ДТП используется при измерении расхода, давления, уровня и других параметров, которые могут быть преобразованы в перемещение. Они применяются в системах дистанционной передачи показаний.
В фотоэлектрических преобразователях (ФП) механическое перемещение преобразуется в электрические сигналы, содержащие информацию о величине и направлении перемещения.
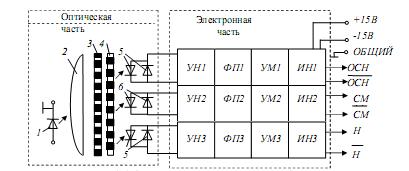
Рисунок 2 – Оптическая система и схема преобразователя
ФП состоит из механической, оптической и электронной частей. Механическая часть обеспечивает жесткую связь объекта измерения с чувствительным элементом ФП.
Оптическая система проводит световой поток от светодиода 1 через линзы 2, растровую индикаторную пластину 3 и растровые диск 4 на фотодиоды 5 и 6. На индикаторной пластине 3 растры расположены в двух секторах и смещены один относительно другого на 90 электрических градусов. Два фотодиода установлены под каждым сектором растровой пластины.
При вращении растрового диска 4 меняется световой поток, и фотодиоды будут выдавать первичные сигналы ОСН (основной) и СМ (смещен) вида sin ф) и cos ф0 соответственно, где ф0 - относительное смещение растров. Фотодиод в центре растрового диска выдает третий сигнал начала отсчета (нулевой сигнал) Н.
Первичные сигналы всех трех каналов поступают на усилители напряжения УН, а потом на формирователи ФП, которые преобразуют синусоидальные сигналы в прямоугольные импульсы. После формирователей сигналы передаются на усилитель мощности УМ и инверторы ИН. В результате на выходе образуется шесть сигналов - три основные (ОСН, СМ, Н) и три инверсные (ОСН, СМ, Н). С помощью этих сигналов определяется начальная точка отсчета передвижения, пройденный угол и направление вращения датчика.
Экспериментальные данные
1. Исследование реостатного преобразователя
| I, мм | R, Ом |
Оределяем чувствительность:

2. Исследование дискретного преобразователя
| Срабат БВК | Вкл. | |
| Отпуск БВК | Выкл. | |
| Срабат ВК | Вкл | |
| Отпуск ВК | Выкл. |
Определяем величину позиционирования
 = /113-111/ = 2 (мм)
= /113-111/ = 2 (мм)
Определяем зону неоднозначности переключателя
 = /3900-3889/ = 11 (мм)
= /3900-3889/ = 11 (мм)
3. Исследование фотоэлектрического преобразователя.
| N, деления лимба | n, количество импульсов |
Строим графическую зависимость n = f(N)
Вывод: в ходе лабораторной работы были исследованны характеристики и принцип действия измерительных преобразователей угловых и линейных премещений; по данным исследования реостатного преобразователя можно сделать вывод, что зависимость сопротивления от положения ползунка носит нелинейный характер. Следовательно ИП нелинейный. Хотя на некоторых участках график носит линейных характер. При исследовании фотоэлектрического преобразователя было установлено, что зависимость носит линейный характер. И данные можно использовать с применением некоторой поправки.