Наверное, сегодня излишне говорить об отравлении природы ядовитыми выбросами и изменениях среды обитания при использовании огневых технологий. Здесь существует и множество других вредных факторов – например, истощение невозобновляемых природных ресурсов, необходимость их добычи, подготовки, транспортировки. И оправдывать такое положение вещей уже никак нельзя, если есть возможность альтернативной замены, к тому же не приносящей вреда окружающей Среде и даже облагораживающей её.
Конечно, говорить здесь нужно не только о ДВС (двигателях внутреннего сгорания), а вообще об огневых технологиях, но объём вырабатываемой всеми ДВС энергии сегодня в два раза превосходит энергетический потенциал всех земных электростанций. Поэтому следует уделить особое внимание мобильным источникам энергии. Например, каждый раз в такте расширения поршень ДВС вынужден преодолевать немалое давление атмосферы, что нельзя назвать рациональным использованием энергетических ресурсов. В защиту современных ДВС можно сказать только о высоко отработанной технологии их производства и эксплуатации, а также о заинтересованности в их использовании миллиардов производителей, потребителей и рабочих, но такого положения вещей уже явно недостаточно для будущего. «Дубовые» технологии здесь должны быть вытеснены «умными» технологиями управления использованием среды обитания. Нужно и самим поменяться, чтобы жить, а не просто существовать.
Начнём с ресурсов: есть ли возможность использовать для выработки энергии возобновляемые ресурсы и источники энергии - например, тепло? На первый взгляд, из-за низкого потенциала тепла на поверхности Земли это неудачная мысль, однако данный источник может быть вспомогательным (второстепенным) и использоваться только вместе с основным источником энергии – например, давлением окружающей среды или давлением воздуха в баллоне. И здесь мы приходим к мысли, что если каким-то образом получится использовать статическое давление без его растраты, тогда давление может быть вообще любой природы – например, давлением воды, силой пружин или/и весом груза (последнее не всегда удобно из-за большой требуемой массы груза). Вот это направление мы и будем развивать, чтобы устройство получилось универсальным. Попутно мы тем самым устраним и одни из основных экологических проблем – практически устраним загрязнение и снизим температуру окружающей среды (если использовать в качестве источника давления воздух или иной инертный газ в ёмкостях, который будет забирать тепло у окружающей среды, или же давление атмосферы по отношению к вакууму в ёмкостях).
На первый взгляд, воспользоваться статическим давлением без его растраты для движения механизмов невозможно, хотя это и идеальный вариант - потери давления за счёт работы механизмов в этом случае легко восполняются низкопотенциальными свободными силами: например, если источником давления является воздух в какой-либо ёмкости без растраты его объёма, то легко восполнить потери его давления при работе за счёт температуры среды, а для гидростатического давления воды или веса груза их потери восполняет гравитация. Но не будем торопиться с выводами. Во-первых, траектории движения могут быть согласованы с формой поверхностей оказываемого на тело давления (объёмный принцип), при этом можно использовать эффект выталкивания тела из области с большим давлением (напряжённостью, потенциалом) в область с меньшим давлением (движение в неоднородном поле сил). При этом изменения давления могут производиться как внешними силами (например, изменением формы поверхностей оказываемого на тело давления), так и внутренними силами (например, изменением размеров тела). Во-вторых, можно воспользоваться дополнительно другими свободными силами – например, силой инерции или силой тяжести. Также векторы давления и движения могут располагаться в независимых плоскостях (пересекающихся под прямым углом).

 Примем, что давление у нас меняется в пространстве (неоднородно) за счёт формы поверхностей оказываемого давления. Также используем возникающие при движениях силы инерции. При соблюдении всех указанных выше условий и требований принцип работы двигателя может быть таким:
Примем, что давление у нас меняется в пространстве (неоднородно) за счёт формы поверхностей оказываемого давления. Также используем возникающие при движениях силы инерции. При соблюдении всех указанных выше условий и требований принцип работы двигателя может быть таким:

Рис. Преобразование неоднородного статического давления и инерционных сил в движение ротора. Вариант 1. Плоскость вращения ротора перпендикулярна плоскости листа (развёртка поверхности вращения ротора) или расположена в плоскости листа (многоэлементный ротор). Левый и правый края рисунка сшиты по пунктирной линии.
Здесь воздух со статическим давлением p, находящийся в ёмкостях 1, через гибкие профилированные мембраны 2 воздействует на ролики 3 ротора (на рисунке не показан). Схема элемента ротора показана справа, он состоит из роликов 3 и рамы 4. За счёт формы мембран элементы ротора выталкивается из области с большим давлением в область с меньшим давлением, при этом ротор движется в одном направлении за счёт чередования расположения направляющих статора 2 (воздушных ёмкостей 1). Это похоже на то, как вишнёвая косточка вылетает из сжатых пальцев, только здесь это происходит периодически. Геометрический принцип расположения поверхностей оказываемого статором давления p эквивалентен односторонней Мёбиусной поверхности, число оборотов которой равно числу используемых элементов статора (между пунктирными линиями).
Энергетический выигрыш при работе двигателя получается за счёт использования инерционных сил, для этого ротор должен быть раскручен до некоторой критической скорости вращения стартёром, как в обычном ДВС. При ускорении роликов массы m вниз и вверх рама элементов ротора 4 упруго деформируется (надо подобрать материал) и тем самым облегчает движение ротора по направляющим статора 2. Для этого подобрана такая форма направляющих 2, как показано на рисунке. Чтобы снизить инерционность движения ротора, момент инерции роликов J должен быть по возможности минимальным, то есть их масса m должна быть сосредоточена в центре вращения и на валу рамы 4.
При движении в поле давлений статора каждый элемент ротора движется с переменным ускорением (почти по гармоническому закону). При объединении нескольких элементов на роторе он будет эти колебания нивелировать (уравнивать), что приведёт к установлению некой средней скорости вращения. Скорость вращения ротора практически не будет колебаться, если число элементов ротора и поверхностей давления статора будет достаточно велико (не менее четырёх).
Постоянство давления воздуха p в ёмкостях за счёт их большой поверхности поддерживается температурой среды T. Соответственно, при работе происходит потребление энергии атмосферы и её остывание, что в целом благотворно отразится на экологической обстановке. Чем выше давление p, тем больше мощность устройства и стартовая скорость при прочих равных показателях, но при этом требуется улучшать теплообмен со средой при сочетании разных его механизмов (теплопередача, испарение, излучение). Если обычный бензиновый или дизельный двигатель остужают принудительно, то здесь при умеренных мощностях обычно достаточно обеспечить хороший контакт со средой. И наоборот, при значительных колебаниях температуры среды может стать необходимым термостатирование двигателя. В конечном итоге, всё зависит от условий работы.
В некоторых случаях для работы можно задействовать дополнительно другие силы (например, гравитацию), при этом если механизм их использования отличается от рассматриваемого, то такой двигатель будет гибридным. Если на работу двигателя влияет сила тяжести, то можно менять его расположение разными поворотами.
Хорошей управляемости двигателя можно достичь разными способами. Поскольку ротор подвижен, регулировать мощность и останавливать двигатель лучше через поверхности статора путём их поворотов или сближения-удаления. Ввиду простоты схемы она нетребовательна к настройке, необходимо только обеспечить безопасность при выходе из строя разных элементов.
Возможна иная схема (принцип работы и все обозначения прежние):
Рис. Преобразование неоднородного статического давления и инерционных сил в движение ротора. Вариант 2. Плоскость вращения ротора.
Здесь направляющие статора 1 имеют эллиптическую форму. В общем случае они, как и в первом варианте, они могут иметь многолепестковую (многоэлементную) форму. Форма элемента ротора остаётся прежней.
Итак, что мы получили в итоге? Сочетание и согласованность в одном устройстве практически всех основных физических механизмов - преобразования статики в динамику (обратное характерно для гидроударных технологий), сил инерции, поперечных и продольных волн, вращения, использования тепла, есть даже геометрический принцип односторонней поверхности (лист Мёбиуса – форма и расположение источников давления). А это и есть основной природный принцип! Гармонию природы мы тем самым не нарушаем, как и соблюдаем основные принципы идеальности – эффективность, высокую управляемость, безопасность, универсальность, красоту, простоту, надёжность, скрытность работы (отсутствие шумов), компактность и лёгкость.
Существует похожая конструкция двигателя – роторная машина «Ротфен» Г.Первеева. У нас принцип работы отличается тем, что используется неоднородное статическое давление, разные варианты конструкций и траекторий движения. Природа давления p может быть тоже разной - магнитной, электромагнитной, электростатической, гравитационной, просто механической. Ёмкости 1 могут быть вакуумными, соответственно здесь будет работать уже непосредственно давление внешней среды. В общем, можно дать волю воображению.
Существуют и гироскопические преобразователи статического давления в движение, но они имеют достаточно сложную и тонкую механику, чего не скажешь о рассматриваемом устройстве - при налаживании его серийного произодства и сети сервисов трудностей будет гораздо меньше, чем при изготовлении и эксплуатации ДВС.
В принципе, ничто не мешает использовать в качестве статического давления p те же инерционые силы – для этого как нельзя лучше подойдут центробежная и кориолисова силы ротора. В этом случае принцип работы двигателя инвертируется – ротор становится активным, а пассивный статор имеет направляющие. Покажем, что саморазгон ротора в данном случае можно обеспечить без использования статора - только за счёт действия в нём инерционных сил, хотя при этом также понадобятся и другие внешние силы (давление окружающей среды). Здесь всё делается так же, как и в генераторе Виктора Шаубергера: центробежная сила ротора ускоряет жидкость (воду) к периферии ротора по направляющим (трубкам), что даёт дополнительную энергию, при этом за счёт возникшего вакуума (разрежения) в центре ротора давление атмосферы обеспечивает непрерывное поступление туда новых порций воды. Для беспрепятственного ускорения жидкости необходимо расширение трубок к периферии ротора (по типу рогов антилопы).
Во-первых, здесь требуется исключить торможение ротора при движении воды к периферии ротора по радиусу за счёт увеличения линейной скорости ротора (кориолисову силу), что достигается спиральной формой направляющих (трубок), закрученных в сторону движения жидкости. При такой их форме кориолисова сила, действующая перпендикулярно движению, начинает дополнительно разгонять жидкость. Также при этом образуется дополнительная центробежная сила, ещё больше ускоряющая ротор ротор и соответственно дающая прибавку мощности - для постоянного действия этой силы на всей траектории движения жидкости спиральные трубки имеют плавно нарастающий шаг (радиус) к периферии ротора (при этом жидкость выходит из сопел ротора не совсем по касательной, как показано на рисунке). О Спиральном движении рассказано также в конце статьи.
Во-вторых, необходимо обеспечить упругость рабочего тела (жидкости, воды) путём добавления в него воздуха в определённом соотношении, что даёт возможность воспользоваться помимо кинетической энергии жидкости также её потенциальной энергией сжатия (под действием той же центробежной силы) при выходе из сопла по касательной к периферии ротора. Для этого сопла имеют сужение в середине, при этом в результате резкого расширения сопла к концу и соответственно резкого падения давления рабочего тела внутри сопла часть воды превращается в пар (изменение агрегатного состояния рабочего тела) и соответственно происходит увеличение скорости рабочего тела и дополнительный саморазгон ротора. Упругая среда также уменьшает потери в жидкости на разрывы и турбулентность потока. Сопла обеспечивают дополнительно закрутку потока перпендикулярно радиусу с образованием зоны вакуума внутри, что ещё более ускоряет движение жидкости – это уже третья центробежная сила в конструкции. Для увеличения сжатия рабочего тела трубки (направляющие) также могут быть закручены перпендикулярно радиусу, как это сделано в генераторе Шаубергера (по типу рогов антилопы) – это четвёртая центробежная сила.
В-третьих, после выхода рабочего тела из сопел ротора по касательной его можно направить на направляющие статора, завихряющие рабочее тело и тем самым формирующие уже пятую центробежную силу, подталкивающую ротор.
В-четвёртых, при конусной форме и вертикальном расположении ротора жидкость разгоняется также силой тяжести, хотя это частично компенсируется подъёмом жидкости к вершине ротора против силы тяжести (частично, поскольку сила тяжести помогает согласованной работе других сил!).
Итак, в такой простой схеме жидкость согласованно ускоряют в общем случае восемь сил! При этом семь из них являются внешними (силы инерции и сила тяжести) и поэтому обеспечивают значительную прибавку мощности на роторе. Упрощённо схема работы показана на рисунке (ротор плоской или лучше конической формы):

Рис. Колесо с использованием инерционных сил и давления среды (вид сверху).
Управление происходит со статора, как и в предыдущих устройствах. Подробнее об этом можно почитать в описаниях генератора Шаубергера.

 Возможны и некоторые другие конструктивно более простые устройства, способных выполнять функцию холодильника или кондиционера вместе с возможностью привода механизмов, хотя и менее эффективные – например, колесо-холодильник А.Фролова:
Возможны и некоторые другие конструктивно более простые устройства, способных выполнять функцию холодильника или кондиционера вместе с возможностью привода механизмов, хотя и менее эффективные – например, колесо-холодильник А.Фролова:
Рис. Колесо-холодильник.
Здесь воздух под давлением p внутри колеса (упругое тело) после начального разгона под действием центробежной силы Fцб давит преимущественно на касательные перегородки колеса и тем самым ускоряет вращение (см. векторы сил на рисунке). За счёт большой площади перегородок возможно получить достаточный по величине суммарный крутящий момент. При объёмной форме перегородок можно получить также осевую составляющую центробежного давления (силы) Fцб, то есть безопорную тягу (подъёмная сила, на рисунке не показана). При работе упругая энергия газа расходуется, забирается у окружающей среды и тем самым остужает её. Мощность устройства можно повысить как увеличением давления воздуха p, так и выбором упругого материала со стороны давления газа p. Целесообразно обеспечить демпфирование устройства (с возможностью его регулировки при изменениях температуры и давления), что обеспечит охлаждение среды при постоянной скорости вращения и исключит необходимость периодического торможения. Общее требование при высокой скорости вращения, предъявляемое к маховикам и гироскопам – хорошая уравновешенность ротора.
Итак, в силу того, что статическое давления p при работе меняется незначительно (происходит преобразование статического давления в движение без потоков вещества), возможно восполнение его потерь ограниченными по величине свободными силами - теплом среды, гравитацией, электрическим или магнитным полем Земли и др. Если давление p оказывается какими-либо пружинами (а по сути здесь везде мы имеем дело с «пружинами» разной природы), то последние всегда теряют свою силу со временем (это касается также магнитных и электростатических «пружин»). Но пружины имеют важное преимущество – возможность большой амплитуды движений при малой массе, поэтому если возможна их периодическая замена с последующим восстановлением (пружины могут быть и магнитными, а ещё лучше электростатическими), то можно рекомендовать использование простого устройства на рычагах:

Рис. Колесо со сверхъединичным рычагом.
Это изобретение С.Заболоцкого, описанное в его патенте как «Новый рычаг с КПД больше 100%». В отличие от обычного рычага, использование блока позволяет получить многократный выигрыш в силе без проигрыша в пути, что поясняется рисунками (N-кратный выигрыш в силе зависит от отношения диаметра ролика к диаметру блока r). Единственное условие – ролик не должно заклинивать между ремнём (цепью) и шкивом блока (при необходимости можно сделать направляющие для ролика). Выигрыш в работе получается оттого, что ролик опирается через блок на нерастяжимый трос с левой стороны, эквивалентный точке опоры в обычном одноплечем рычаге «тачка». Парадокс в том, что энергия при этом образуется буквально «из ничего», причём это не единственный такой случай – таким же свойством рождения или уничтожения энергии обладают также, например, согласованные Спиральные формы и траектории (см. пояснение в конце статьи) или рождение и уничтожение пары тороидальный вихрей с противоположным направлением вращения. Но во всех случаях для этого требуются которые начальные затраты, как и при работе прочих устройств свободной энергии.
Заметим, что хотя рычаги широко используются в живой природе для преобразования сил и скоростей (например, при прикреплении мышц к костям), здесь не задействованы напрямую остальные физические механизмы. Общее с природой здесь – механизм параметрического резонанса с отбором мощности и управлением одним маховиком в независимых направлениях. Чем быстрее вращается маховик, тем легче перескакивает управляющий ролик из одного крайнего положения в другое. Для равномерности вращения нужно не менее четырёх блоков с пружинами. Необходимо также учитывать, что при размещении блоков с одной стороны устройства создаётся безопорная тяга устройства в направлении, противоположном направлению тяги блоков (здесь мы опять «погрешили перед наукой», но не жалеем об этом – всё силы инерции являются внешними, эфиропорными силами и поэтому могут использоваться как и все другие механические силы). В этом случае усложняется управление устройством (поскольку лучше управлять положением роликов на блоке), поэтому блоки лучше размещать равномерно и симметрично вокруг маховика, а привод делать через маховик.
Теперь рассмотрим возможность использования для привода силы тяжести. Опять же, использование принципов управления позволяет использовать для этой цели одну только гравитацию без инерционных сил, но последние могут очень помочь и упростить схему устройства, тес более это практически «даровые» силы. Доказательством тому служит конструкция гравитационного колеса Ивана Полуляха:
Рис. Колесо с использованием сил инерции и гравитации.
Здесь на крестообразной раме 1 через шарнир 4 закреплены грузы 3, которые при разгоне колеса под действием центробежных сил Fцб занимают положение вдоль направляющих рамы 1 и тем самым практически не влияют на движение колеса (скорость вращения w). Однако на грузы действует также сила тяжести, что вызывает провисание горизонтальных грузов относительно рамы.
Крестовина 2 имеет жёсткое зацепление с рамой 1, но при этом между ними имеется люфт - поэтому, хотя они и вращаются синхронно, крестовина 2 не давит на грузы 3. В центре вращения колеса расположен узел управления в виде клиновидной или гидравлической передачи 6, позволяющей путём давления клина или жидкости извне колеса поворачивать крестовину 2 относительно рамы 1 в направлении грузов 3 за счёт люфта между ними (показано маленькой стрелкой против направления вращения колеса w) и затем жёстко фиксировать её к раме 1 и тем самым к грузам 3. При этом справа колеса появляется крутящий момент силы тяжести груза из-за давления груза 3 на крестовину 2 и раму 1 в точке 5, а слева колеса крутящий момент отсутствует, что обеспечивает саморазгон всей конструкции. Если повернуть крестовину 2 относительно рамы 1 и грузов 3 дальше, то появляется также крутящий момент всех грузов в направлении вращения за счёт центробежных сил Fцб (на рисунке не показаны), и тогда можно обеспечить саморазгон колеса даже без использования силы тяжести (например, при горизонтальном расположении колеса). Чтобы остановить колесо, достаточно снять фиксацию крестовины 2 относительно рамы 1 и грузов 3, при этом можно тормозить колесо вращением крестовины 2 в обратном направлении.
Итак, даже в такой простой на вид конструкции есть множество нюансов, связанных с согласованным действием разных сил. В данном случае это позволяет управлять использованием силы тяжести автоматически. Достоинством конструкции по сравнению со многими гравитационными колёсами является также практическое отсутствие шумов при выходе на рабочий режим (скрытность работы). Как обычно, для использования инерционных сил требуется начальный разгон колеса. При неограниченном саморазгоне такое колесо склонно идти «в разнос», поскольку дополнительная мощность P от грузов растёт пропорционально частоте вращения колеса w (без использования управления). Если центробежная сила грузов не используется для создания тяги (линия расположения грузов находится с обратной стороны радиуса колеса), то возможно ограничение саморазгона за счёт ограничения использования силы тяжести грузов под влиянием центробежной силы Fцб. Поскольку последняя растёт как квадрат частоты вращения w, то тем самым квадратично снижается и эффективность использования силы тяжести грузов. Дополнительная мощность колеса P за счёт количества оборотов w растёт также как первая степень частоты вращения w, а итоговая энергетика колеса в данном случае зависит от частоты вращения по закону P~1/w.
Как приспособить такую конструкцию, скажем, для привода на велосипеде? Можно использовать для этого обратный ход педалей («тормоз» на старых велосипедах), прикрепив управляющую крестовину к ведомой звёздочке. Крестовина при надавливании на грузы фиксируется к раме колеса через храповый механизм («трещотка» велосипеда, работающая в обратном направлении при перевороте), причём фиксация должна сниматься при нормальном ходе педалей через клиновидную передачу (типа старого ножного тормоза, можно делать это и через ручной тормоз). Разогнавшись при помощи педалей, далее давим на ножной «тормоз» и некоторое время отдыхаем, наслаждаясь поездкой. Покажем реальными цифрами, что это возможно. Пусть масса одного груза m=500 г, число грузов N=4 и радиус вращения грузов R=20 см. Примем, что центробежная сила в 10 раз превосходит силу тяжести грузов, то есть Fцб=mv2/R=10mg, откуда требуемая скорость v=√(10gR)=4,5 м/с. Центробежная сила груза составит Fцб=mv2/R=50Н=5 кг веса, что позволяет использовать в колесе обычные спицы. Суммарная сила тяги Fтяги = N·Fцб/10 + mg =(N+1)mg=25Н=2,5 кг веса, что достаточно для поддержания постоянной скорости. При необходимости можно опять разогнаться педалями и повторить «торможение».
Гораздо эффективнее устройства, в которых центробежная сила используется целиком, хотя здесь есть и свои трудности. К таким механизмам относятся маятники и маховики с дебалансами В.Милковича (в последнем случае можно избежать использования силы тяжести и соответственно уменьшить массу грузов-дебалансов). Например, можно педалями постепенно раскрутить маховик с дебалансом, а для привода использовать возникающие при этом центробежные силы (для этого маховик должно свободно перемещаться относительно педалей, но это уже конструктивный вопрос и легко решаемый). За счёт ортогональности затраченной и используемой сил в такой схеме получается очень эффективный усилитель мощности, где человеческая сила тратится только на компенсацию потерь при трении в частях механизма. Избыток мощности опять же получается от действия внешних инерционных сил (центробежной силы):

Рис. Колесо с дебалансом.
Проблемы могут возникнуть при управлении таким механизмом, поскольку здесь оно никак не связано с механизмом образования силы, в отличие от предыдущего случая (здесь силы образуются вращающимся с большой скоростью маховиком). Но это решаемо - например, для управления можно использовать муфты сцепления, как это делается в автомобилях. Тогда в схеме будет три колеса – сам маховик, промежуточное колесо с кривошипо-шатунным механизмом (на рисунке показан рычаг как его часть) и оконечное колесо привода. Помимо сложности управления, в схеме есть большая холостая нагрузка на оси в горизонтальном направлении, хотя её можно значительно уменьшить подбором траектории движения груза-дебаланса m (например, при его расположении на ленте-цепи, огибающей некоторое количество роликов-шкивов). Зато здесь исключается саморазгон.
Согласованность разных сил и действий – основополагающий принцип любой организации. При использовании ограниченного числа сил в конструкциях другие силы попросту не учитываются и тем самым не могут облегчить нам жизнь. Рассмотрим для примера, насколько использование одной силы тяжести без учёта других сил может усложнить управление и соответственно конструкцию двигателя (но не принцип работы - здесь имеет место обратная зависимость!):
Рис. Гравитационное колесо с принудительным использованием силы тяжести.
В правой части рисунка показан прямолинейный элемент колеса (вид под прямым углом к плоскости рисунка), проходящий через центр колеса O. Он состоит из двух грузов 3 массой m со связывающим их тросом 4, перекинутым через блок 5 (блоки зафиксированы на колесе, на левом рисунке не показаны). Грузы имеют ролики, двигающиеся вдоль радиуса колеса по прямолинейным направляющим, составляющим часть рамы колеса (на рисунке не показаны). При тяге за один из грузов другой груз перемещается в противоположном направлении (на рисунке показано положение грузов в левой половине колеса).
Грузы двигаются также по неподвижным относительно колеса внутренней и внешней направляющим 1 и 2 (тоже посредством роликов), которые при такой их форме обеспечивают постоянство длины троса 4, связывающего грузы 3 (за каждый оборот грузов по внешней направляющей совершается два оборота грузов по внутренней направляющей). Видно, что крутящие моменты правой и левой половин колеса относительно его центра О существенно отличаются (показано вертикальными стрелками), поэтому это колесо достаточно мощное. Управление нагрузкой обеспечивается перемещением направляющих 1 и 2 горизонтально в противоположных направлениях (показано горизонтальными стрелками). Начальная раскрутка колеса здесь тоже может понадобиться, поскольку хотя согласованное перемещение грузов в противоположных направлениях и позволяет избежать совершения работы против силы тяжести (как и в колесе Ивана Полуляха), колесо будет сильно тормозится при управлении перемещениями грузов по внутренней и внешней направляющим. Управляемость и надёжность здесь существенно ухудшились - введение управления использованием гравитационных сил (помимо управления нагрузкой) существенно усложнило конструкцию. Также эта конструкция достаточно шумная при работе. Здесь нет влияния центробежных сил на положение грузов, хотя возможно их влияние на сопротивление движению грузов по направляющим. Заметим, что тяга такого колеса обеспечивается сразу двумя механизмами – опорным и безопорным, поскольку преобладает центробежная сила грузов в правой половине колеса и вызывает тягу вправо.
Тем не менее, возможны и совсем простые конструкции гравитационных двигателей, хотя обычно это сильно усложняет управление. Для примера, рассмотрим схему гравитационного двигателя С.Портнова:
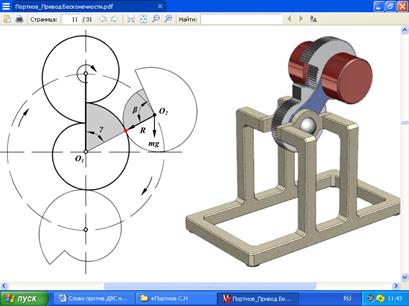
Рис. Нелинейное колесо.
Здесь направляющие периферического колеса и центрального статора и траектория их точки касания имеют форму спиралей одинаковой формы. Работа силы тяжести при перемещении центра масс O2 периферического колеса по замкнутой траектории относительно направляющей статора и центра конструкции О1 равна нулю, однако её суммарный вращающий момент при этом оказывается положительным, что обеспечивает непрерывное ускорение периферического колеса (без учёта центробежных сил). Здесь очень важно, чтобы центр движущейся спирали совпадал с её центром масс, в этом случае при сохранении радиуса вращения R момент инерции и скорость вращения спирали не меняются при свободном движении (но при этом меняется плечо движущей силы).
Действующая сила здесь может быть не только силой тяжести, но и любой потенциальной силой – например, силой сжатой или растянутой пружины. В общем случае такая схема работает как эффективный усилитель мощности (крутящих моментов), при этом центральный статор может вращаться в противоположную сторону относительно периферического колеса. Всё это позволяет понять универсальность согласованного Спирального движения, при этом вращение и прямолинейное движение – его частные (крайние) случаи с углами между касательной и радиус-вектором траектории с направлением на её Центр соответственно 90 и 0 градусов (прямолинейное движение вырождено, поскольку не имеет Центра и поэтому Относительно в отличие от криволинейных траекторий). В рассматриваемой конструкции этот угол постоянен в каждой точке спиралей, что даёт постоянство расстояния между их Центрами - такая спираль называется Логарифмической. К Спиральному движению не по форме, а по существу можно отнести и прочие виды криволинейного движения – движения по Эллипсу, Параболе и Гиперболе (изменение угла между касательной и радиус-вектором из Центра траектории). Всё это легко наблюдаемо в небесной механике.
Есть и более простые возможности изменения моментов сил M=Fd (плеча силы d) для производства или уничтожения энергии – например, качение одиночных спиральных форм по периодической замкнутой наклонной поверхности (использование рычага и обгонных муфт для передачи силы) или попеременное качение эллиптических форм («эстафетный», «волновой» двигатель-генератор), см. рисунки соответственно слева и справа:

Рис. Использование изменений плеча силы d, самих сил F и их моментов M=Fd (R=const).
Обобщая всё сказанное, можно сделать вывод, что источниками энергии могут внешние активные силы (движения и потенциалы среды, а точнее, их разности), внешние пассивные силы (инерция тел в среде), а также различные несоответствия между силами F и их моментами M=Fd (СЕ-рычаг, спиральные движения и формы). Последнее – частный случай ортогональности и независимости движений и воздействий.
P.S. Cледует уточнить, что инерция не является обычным сопротивлением среды или её упругостью, поскольку первое пропорционально скорости тела v, а упругость - смещению тела r, в то время как инерция зависит от ускорения тела a и поэтому является обычной силой. Её природа соответствует некой потенциальной «яме», образуемой вихрем среды вокруг тела (область вакуума), узлом волны на месте тела и/или природой трения тела о среду (оно пропорционально давлению среды на тело).
Таким образом, есть очень много возможностей для построения достаточно энергоёмких двигателей (генераторов энергии) при использовании только свободных сил, окружающих нас повсюду. И в такой ситуации нельзя равнодушно смотреть, как уничтожается окружающая природа. В данном случае «дубовые» бытовые технологии должны уступить место «умным» технологиям управления средой обитания. Для управления вещественной средой в отличие от эфирных технологий нет особых препятствий ни по здоровью, ни по безопасности. Время не ждёт!