Типовой электропривод
Практическая работа №1. Изучение обозначений в схемах электрических принципиальных электроприводов
Цель работы: 1- изучить обозначения основных элементов, применяемых в схемах принципиальных электрических приводов, 2 – изучить схемы включения контроллеров, магнитных пускателей.
Теоретические сведения. Изложены в [1], [2], лекционном материале.
Порядок выполнения работы. Изучить обозначения коммутационной аппаратуры, аппаратуры управления, двигателей, преобразовательных устройств, электронных приборов (диоды, тиристоры, сисмисторы, транзисторы, микросхемы), датчиков – преобразователей информации. На основе раздаточного материала изучаются обозначения основных элементов и их схемы включения.
Используется обучающая программа на ПЭВМ.
Рекомендуемая литература.
1. Типовой электропривод промышленных установок. – С.А. Волотковский, В.И. Емец и др./ Под общ. ред. С.А. Волотковского. – Киев: Вища школа,1983.
2.
3.
Типовой электропривод
Практическая работа №2 Изучение электроприводов крановых механизмов.
Цель работы: 1 – изучить конструкции кранов (мостовых, козловых, портальных, и др.), 2 - состав и устройство их оборудования, 3 - системы электроприводов, 4 - схемы принципиальные электрические отдельных систем электроприводов.
Теоретические сведения. Классификация кранов по назначению, конструкции, типу грузозахватного механизма изложены в [1], [2], лекционном материале.
В крановом электроприводе используются следующие типы электродвигателей:
а) двигатели постоянного тока последовательного или независимого возбуждения. Регулирование их скорости осуществляется путем изменения подводимого к якорю двигателя напряжения и тока возбvждения;
б) асинхронные двигатели переменного тока с фазным ротором. Регулирование скорости этих двигателей производится путем введения в цепь их ротора резисторов;
в) асинхронные двигатели переменного тока с короткозамкнутым ротором, регулирование частоты вращения которых осуществляется изменением частоты напряжения преобразователя;
г) асинхронные двигатели переменного тока с короткозамкнутым ротором и двумя или тремя обмотками на статоре с разным числом полюсов. Регулирование частоты вращения этих двигателей производится пvтем изменения числа пар полюсов обмоток.
Большинство промышленных подъемных кранов оборудуются двигателями постоянного или переменного тока с регулированием частоты вращения и момента с помощью контроллеров. Специальные краны, предназначенные для выполнения особенно точной работы, снабжаются сложными системами электропривода с регулируемым источником питания двигателя.
В настоящее время применяются следующие системы электропривода крановых механизмов:
1. Система непосредственного управления с помощью силовых кулачковых контроллеров. Такая система используется для управления крановыми механизмами легкого и среднего режимов работы с диапазоном регулирования частоты вращения не более 3:1 и небольшим (до 120) числом включений в час.
В электроприводе механизмов подъема с двигателем постоянного тока применяется несимметричная схема контроллера с потенциометрическим включением якоря двигателя на положениях спуска, а в электроприводе механизмов передвижения -симметричная схема контроллера с последовательно включенными резисторами. Управление асинхронными двигателями переменного тока с фазным ротором осуществляется кулачковыми контроллерами, производящими коммутацию обмоток статора, а также переключение резисторов в цепи ротора.
2. Система с магнитными контроллерами. Эта система используется в установках постоянного и переменного тока. Операции по управлению в ней осуществляются с помощью командоконтроллеров. Такая система обеспечивает диапазон регулирования частоты вращения в пределах 6:1.
3. Система переменного тока с тиристорным регулятором напряжения. Напряжение на обмотку статора асинхронного электродвигателя с фазным ротором подается от тиристорного регулятора напряжения. При автоматическом регулировании напряжения с о. с. по скорости эта система обеспечивает регулирование частоты вращения в диапазоне 10:1.
4. С и с т е м а Г—Д. В крановых электроприводах эта система получила большое распространение, являясь до недавнего времени наиболее эффективной с точки зрения обеспечения необходимого диапазона регулирования скорости при всех многообразных режимах работы электропривода. Система Г—Д обеспечивает регулирование частоты вращения в диапазоне 10:1, обладает хорошими регулировочными характеристиками и отличается сравнительно невысокой стоимостью.
5. Система постоянного тока с тиристорным преобразователем напряжения (система ТП—Д). Эта система обладает хорошими регулировочными характеристиками и обеспечивает регулирование частоты вращения в диапазоне 10:1.
6. Система с тиристорным преобразователем частоты (система ТПЧ—Ад). Данная система при использовании асинхронных двигателей с короткозамкнутым ротором обеспечивает большой диапазон регулирования частоты вращения (до 60:1) и высокие динамические показатели электропривода.
Схемы принципиальные электрические наиболее применяемых типов электроприводов и их механические характеристики приведены на рис. 1 – 6. Схема защитной панели и конструкция тормозного механизма – на рис..
Порядок выполнения работы.
1. Изучить по приведенной литературе устройство, состав и параметры оборудования кранов.
2. Изучить схемы принципиальные электрические электроприводов с силовым и кулачковыми контроллерами типа ККТ 69А (рис.1), ККВ-02 (рис.20, ККТ61А (рис. 3), схему защитной панели (рис.), устройство тормозного механизма.
Контрольные вопросы.
1. Какое состояние тормозных механизмов кранов при отключенном электроприводе?
2.Для чего предназначен режим электромагнитного тормоза в электроприводе с кулачковым контроллером ККТ65 и как работает схема?
3. Как работает схема контроля выпрямительного моста в схеме электропривода с кулачковым контроллером ККТ65.
4. Как выбрать мощность двигателя лебедки крана.
Рекомендуемая литература
1. Типовой электропривод промышленных установок. – С.А. Волотковский, В.И. Емец и др./ Под общ. ред. С.А. Волотковского. – Киев: Вища школа,1983.
2. Соколов. М.И. Автоматизированный электропривод общепромышленных механизмов.-: М. Энергия, 1986 г.
3. Ильинский Н.Ф. Козаченко В.Ф. Общий курс электропривода. Учебное пособие для электротехн. и энергетич. Специальностей ВУЗов. М, Энергоатомиздат, 1992 г.
4. Ключев В.И., Терехов В.М. электропривод и автоматизация промышленных механизмов.- М.: Энергия,1980 г.
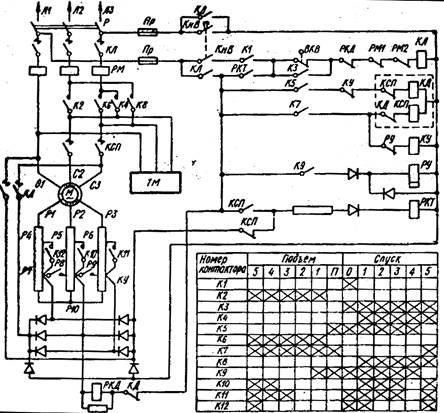
Рис.1 Принципиальная схема кранового электропривода с силовым кулачковым контроллером типа ККТ65А и диаграмма замыкания его контакторов
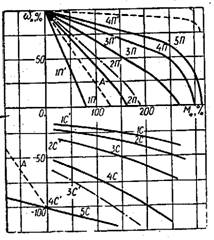
Рис. 2 Механические характеристики электроприводов с силовыми кулачковыми контроллерами типов ККТ65А и ККТ69А
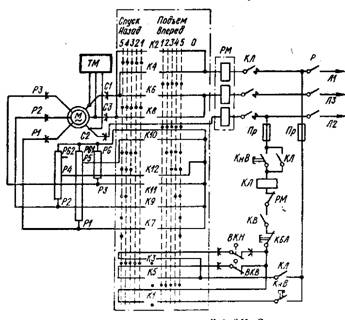
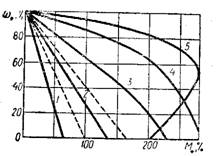
б)
а)
Рис.3 Принципиальная схема кранового электропривода с силовым кулачковым контроллером типа ККТ61А - а) и его механические характеристики - б)
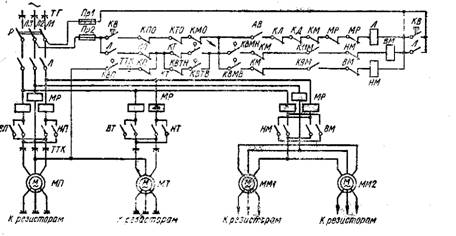
Рис 4 Схема защитной панели типа мостового крана
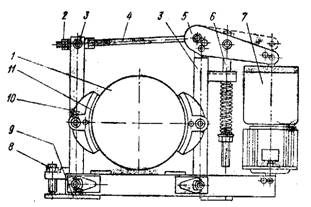 Рис. 5 Колодочный тормоз с длинноходовым приводом: 1 – тормозной шкив, 7 – электромагнитный привод тормоза, 10 – чугунные колодки, 11 – фрикционные накладки; остальные элементы, обозначенные на рисунке, обеспечивают регулировку и настройку тормоза
Рис. 5 Колодочный тормоз с длинноходовым приводом: 1 – тормозной шкив, 7 – электромагнитный привод тормоза, 10 – чугунные колодки, 11 – фрикционные накладки; остальные элементы, обозначенные на рисунке, обеспечивают регулировку и настройку тормоза