Графический метод кинематического анализа
Преимущество этого метода заключается в наглядности и простоте. Он хорош для кинематического анализа звеньев, совершающих возвратно-поступательное движение. Недостаток метода – невысокая точность, которая зависит от точности графических построений.
Графоаналитический метод кинематического анализа
Графоаналитический метод называют методом планов скоростей и ускорений.
Графический (метод диаграмм) и графоаналитический методы (метод планов скоростей и ускорений) кинематического анализа механизмов имеют недостатки: невысокая точность, определяемая точностью графических построений, и большая трудоёмкость. При иcпользовании графического метода необходимо построить диаграммы перемещений, скоростей и ускорений для каждой исследуемой точки механизма, а при использовании графоаналитического метода – несколько планов скоростей и ускорений механизма, чтобы определить динамику изменения скорости и ускорения интересующих нас точек (т.е. при различных положениях механизма).
Эти недостатки отсутствуют в аналитическом методе. Но при этом необходимо составлять достаточно сложные аналитические зависимости (формулы) и иметь возможность решать их с использованием компьютерных техники и технологии, что в последнее время возможно и доступно.
Методы аналитического исследования:
метод замкнутых векторных контуров (метод Зиновьева) удобен для кинематического анализа практически всех используемых в технике несложных рычажных механизмов;
метод преобразования координат (метод Морошкина) удобен для кинематического анализа многозвенных механизмов типа манипуляторов промышленных роботов.
12. Аналитический метод исследования кинематики механизма (на примере синусного механизма).
Аналитические методы исследования позволяют проводить анализ с заданной степенью точности. Кроме того, создание математических моделей механизмов позволяет решать задачи их оптимального синтеза при использовании ЭВМ.

Рассмотрим пример кинематического исследования синусного механизма (механизм двойного ползуна), где кривошип 1 вращается с угловой скоростью ω и угловым ускорением ε (рис.20).
Тогда скорость и ускорение точки А равны:
VA=lOA·ω;  .
.
Все точки звена 1 и 2 описывают окружности, а точки звена 3 движутся поступательно, имея перемещения, скорости и ускорения равные:
SB=lOA·sinφ=lOA·sinωt; VB=dSB/dt=dSB·dφ/dφ·dt=lOA·ω·cosφ;
aB=d2SB/dt=lOA·(ε·cosφ-ω2·sinφ)
при ε=0 aB=-lOA·ω2·sinφ.
При исследовании многих механизмов получаются достаточно громоздкие формулы, что не является препятствием при использовании ЭВМ.
При исследовании пространственных механизмов используются элементы векторной алгебры и векторного анализа. Положения, скорости и ускорения точек механизма выражаются в векторной форме, при необходимости вычисляются проекции на оси и плоскости.
13. Определение функции положения механизма с помощью разметки
Определение функции положения
При использовании графоаналитического метода определение функции положения механизма производится с помощью разметки механизма. Разметка механизма – это ряд последовательных положений механизма, построенный в зависимости от положений входного звена, охватывающих весь цикл его движения (как правило, один оборот). Каждый механизм в соответствии с его кинематической схемой имеет свои особенности в построении разметки. Разметка строится в некотором масштабе, начиная от одного из крайних п  оложений, отмечаемого нулевым номером. Затем окружность, описываемая концом входного звена (кривошипа), делится на двенадцать равных частей, которые обозначаются номерами в направлении угловой скорости. После этого строятся положения остальных звеньев механизма, и строятся траектории заданных точек.
оложений, отмечаемого нулевым номером. Затем окружность, описываемая концом входного звена (кривошипа), делится на двенадцать равных частей, которые обозначаются номерами в направлении угловой скорости. После этого строятся положения остальных звеньев механизма, и строятся траектории заданных точек.
Для примера на рис. 4.2 приведена разметка кривошипно – ползунного механизма, с помощью которой легко определить путём измерений перемещения точки В ведомого звена, соответствующие углам поворота кривошипа, и представить их в виде графика или таблицы. Это и будет функция положения механизма.
З а м е ч а н и е о м а с ш т а б е. Масштабом называется число, показывающее, сколько единиц физической величины содержится в одном миллиметре её изображения. В механике машин в масштабе изображаются любые физические величины: угол поворота, время, перемещение, скорость, сила, работа, мощность и т. д. Масштаб обозначается буквой  с индексом обозначения физической величины и имеет размерность в виде дроби, в числителе которой указывается размерность изображаемой физической величины, в знаменателе – миллиметры. Например:
с индексом обозначения физической величины и имеет размерность в виде дроби, в числителе которой указывается размерность изображаемой физической величины, в знаменателе – миллиметры. Например:  – масштаб длин читается: ноль целых, две тысячных метра в одном миллиметре (изображения);
– масштаб длин читается: ноль целых, две тысячных метра в одном миллиметре (изображения);  – масштаб времени, читается: две секунды в одном миллиметре.
– масштаб времени, читается: две секунды в одном миллиметре.
14. Определение скоростей и ускорений механизма с группой Ассура 2-го вида методом планов.
Планом скоростей (ускорений) механизма называется пучок векторов, выходящих из одной точки (полюса плана), каждый из которых в некотором масштабе изображает вектор абсолютной скорости (абсолютного ускорения) какой-либо точки механизма, а отрезки, соединяющие их концы, изображают векторы относительных скоростей (относительных ускорений).

Построение плана скоростей сводится к реализации известного положения теоретической механики, согласно которому при плоско-параллельном движении твёрдого тела (звена) скорость любой его точки равна векторной сумме скорости в поступательном переносном движении вместе с другой точкой, принятой в качестве полюса, и скорости её в относительном вращательном движении относительно этого полюса.
Р ассмотрим построение планов скоростей и ускорений на примере кривошипно-ползунного механизма (рис. 4.3). Схема механизма должна быть изображена в масштабе  в исследуемом положении. Прежде необходимо определить параметры движения точки А. Её скорость по величине равна произведению угловой скорости
в исследуемом положении. Прежде необходимо определить параметры движения точки А. Её скорость по величине равна произведению угловой скорости  кривошипа 1 на его радиус
кривошипа 1 на его радиус  , т. е.
, т. е.  и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, т. е.
и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, т. е.  и направлено от точки А к точке О, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Скорость точки В определяется векторным равенством
и направлено от точки А к точке О, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Скорость точки В определяется векторным равенством  , т. е. скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и по направлению, второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, т. е. известно по направлению, и, наконец, вектор левой части направлен параллельно направляющим ползуна. При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе
, т. е. скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и по направлению, второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, т. е. известно по направлению, и, наконец, вектор левой части направлен параллельно направляющим ползуна. При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе  .
.
Построение плана ускорений производится в той же последовательности, что и план скоростей. При этом используется векторное равенство  , в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна. В этих условиях треугольник ускорений не строится. Разложим вектор относительного ускорения на две составляющих, согласно равенству
, в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна. В этих условиях треугольник ускорений не строится. Разложим вектор относительного ускорения на две составляющих, согласно равенству  . Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, т. е.
. Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, т. е.  . Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба
. Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба  . Планы скоростей и ускорений данного механизма представлены на рис. 4.3.
. Планы скоростей и ускорений данного механизма представлены на рис. 4.3.
Используя планы, легко найти физические величины скоростей и ускорений, для этого необходимо измерить отрезки в миллиметрах, выражающие скорости и ускорения, и умножить их на соответствующий масштаб.
Абсолютная скорость точки В:  ,
,  .
.
Относительная скорость точки В:  ,
,  .
.
Угловая скорость шатуна 2:  ,
,  .
.
Тангенциальное ускорения точки В относительно точки А:
 ,
,  .
.
Полное относительное ускорение:  ,
,  .
.
Угловое ускорение шатуна 2:  ,
,  .
.
15.14.16. Определение скоростей и ускорений механизма с группой Ассура 1-го вида методом планов. Определение скоростей и ускорений механизма с группой Ассура 2-го вида методом планов. Определение скоростей и ускорений механизма с группой Ассура 2-го класса методом планов
Кинематическое исследование механизма методом планов скоростей и ускорений
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное – движение данной точки относительно той, движение которой принято за переносное:

На плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана.
На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает. Отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек.
Рисунок 1 – Кинематическая схема плоского рычажного механизма
Рассмотрим построение планов для механизма, представленного на рисунке 1. Вначале рассматривается начальный механизм, а далее решение ведется по группам Ассура в порядке их присоединения. Начальный механизм:

Здесь

По вычисленному значению VA выбираем масштаб плана скоростей KV и из произвольного полюса откладываем отрезок va изображающий эту скорость:

Можно также назначать отрезок va а масштаб KV вычислять:

Группа Ассура второго класса 1-го вида (звенья 2, 3):

Истинные значения (в м/с) относительных скоростей VBA и VBC определяются после построения плана умножением соответствующих отрезков (в мм) на масштаб плана:

а зная их, можно определить и угловые скорости звеньев 2 и 3:
Скорость точки D на плане скоростей можно определить по подобию. (Если известны скорости двух точек одного и того же звена, то скорость любой третьей точки этого же звена можно определить, построив на плане скоростей фигуру, подобную фигуре, образованной этими же буквами на звене механизма). Точки С, В, D на звене 3 лежат на одной прямой. На плане строим отрезок сd, соблюдая условие подобия:

Группа Ассура второго класса 3- го вида (звенья 4,5):

где D5 - точка, находящаяся на звене 5 под точкой D. После определения скорости движения точки D5 относительно точки E можно вычислить угловую скорость звеньев 4 и 5 (ω4= ω5, т. к. эти звенья соединяются поступательной парой):

Примечание: в данном случае размер DE является величиной переменной (т.е. в задании он отсутствует), поэтому в каждом положении механизма он определяется через отрезок на чертеже и масштаб длин.
План ускорений строится в таком же порядке.
Начальный механизм
Ускорение точки A состоит только из нормальной составляющей, т.к. задана постоянная угловая скорость первого звена (ω1=соnst):

По вычисленному значению ускорения точки A выбирается масштаб плана ускорений и определяется отрезок на плане, соответствующий этому ускорению (или вычисляется масштаб плана ускорений по выбранному отрезку, изображающему ускорение точки A):

Здесь точка w – полюс плана ускорений.
Группа Ассура (звенья 2,3) второго класса 1-го вида:

После построения определяются a τBA и a τBC, по которым можно вычислить угловые ускорения звеньев 2 и 3:

Ускорение точки D определяем по подобию так же, как определяли скорость этой точки:


Рисунок 5 – Планы скоростей и ускорений для заданного положения механизма
Группа Ассура (звенья 4,5) второго класса 3-го вида:

Для определения направления a kD5D надо вектор V D5D повернуть на 900 в направлении ω5. Угловые ускорения:

При силовом расчете необходимо иметь ускорения центров масс (a si), которые на плане ускорений определяются методом подобия.
Планы скоростей и ускорений для первого положения заданного механизма приведены на рисунке 5.
Уравнение планов скоростей и ускорений для каждой группы Ассура приведены в таблице 1.
Таблица 1 – Кинематический анализ групп Ассура II класса методом планов
| Вид группы | Конфигурация группы | Уравнения для построения планов скоростей и для определения угловых скоростей | Уравнения для построения планов ускорений и для определения угловых ускорений |

|

|

| |
| 2 |

|
|

|
| 3 |

|

|

|
| 4 |

|

|

|
| 5 |

|

|

|
17. Метод графического дифференцирования при исследовании кинематики механизмов.
Метод касательных основан на геометрической интерпретации производной. При использовании метода кинематических диаграмм вначале дифференцируется диаграмма перемещений для получения графика (диаграммы) скоростей. Рассмотрим графическое дифференцирование на этом примере.
V = ds/dt, но т.к. аналитическое выражение для перемещений в данном случае отсутствует, то представляем значения перемещений и времени через отрезки на диаграмме перемещений:

тогда

Но отношение бесконечно малого приращения функции к бесконечно малому приращению аргумента на графике представляет собой тангенс угла наклона касательной к данной кривой в рассматриваемой точке, т.е.
Используя данное обстоятельство, диаграмму скоростей строят в следующем порядке (рисунок 11):
- проводят касательные к диаграмме перемещений в намеченных положениях;
- слева от начала координат на оси абсцисс будущей диаграммы скоростей отмечают полюс P на некотором расстоянии H (которое называется полюсным расстоянием);
- из полюса проводят лучи, параллельные проведенным касательным на диаграмме перемещений. Эти лучи отсекают на оси ординат будущей диаграммы скоростей отрезки
oi*=H.tg α i
Таким образом, и скорость в i -том положении и отрезки oi* пропорциональны tg α i, а значит отрезки oi* пропорциональны Vi (скорости исследуемого звена в соответствующем положении механизма), т.е. они представляют собой
__
изображение скорости в виде отрезка в некотором масштабе – Vi.

или
т.е.
где Kv – масштаб диаграммы скоростей по оси ординат в (м/с)/мм.
Далее отрезки oi* переносят в соответствующие положения, отмеченные на оси абсцисс, и, соединив концы отрезков плавной кривой, получают диаграмму скоростей исследуемого звена. Аналогично строится диаграмма ускорений. При этом масштаб ускорений
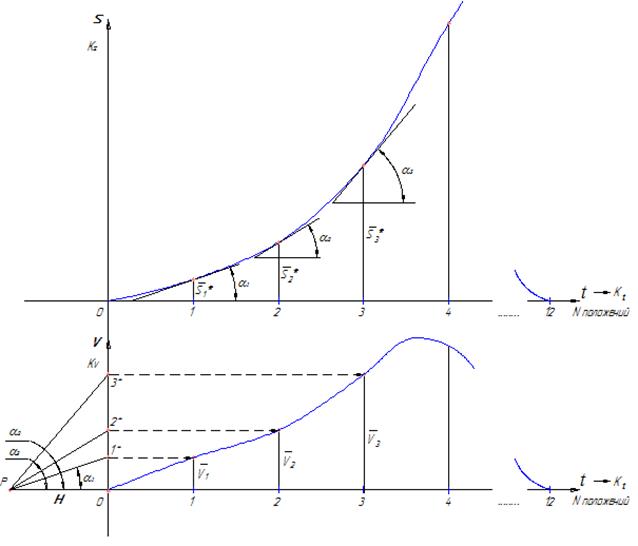
Рисунок 11
Теоретически метод касательных самый точный из графических методов дифференцирования, т.к. дает значение мгновенной скорости (ускорения) именно в том положении, в котором проведена касательная.
Однако из-за трудности точного проведения касательных (и сама дифференцируемая кривая, построенная по точкам, имеет отклонения от ее теоретической функции), практическая точность этого метода весьма низкая, поэтому он используется редко (обычно когда надо проанализировать характер движения звена без получения конкретных численных результатов).
18. Задачи кинетостатики на примере любого механизма; исходные данные.