Б И Л Е Т № 43
Законы частотного регулирования скорости асинхронных электроприводов.
Применение частотного регулирования скорости значительно расширяет возможности использования асинхронных электроприводов в различных отраслях промышленности. В первую очередь это относится к установкам, где производится одновременное изменение скорости нескольких асинхронных двигателей, приводящих в движение, например, группы текстильных машин, конвейеров, рольгангов и т. п. Используется частотный принцип регулирования скорости асинхронных двигателей и в индивидуальных установках, особенно в тех случаях, когда необходимо получить от механизма высокие угловые скорости, например, для центрифуг, шлифовальных станков и т. д. Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя; частоты ПЧ, показанного на рис. 6-1, энергия к которому подводится от сети постоянной частоты f1c и напряжения U1c На выходе преобразователя, как правило, меняется не только частота f1, но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу действия и конструкции.

 Законы частотного управления
Законы частотного управления
1) U/f = const
2) Eвн/f = const
3) C параметрической компенсацией падения сопротивления статора
Позиционная САР. Малые и средние перемещения.
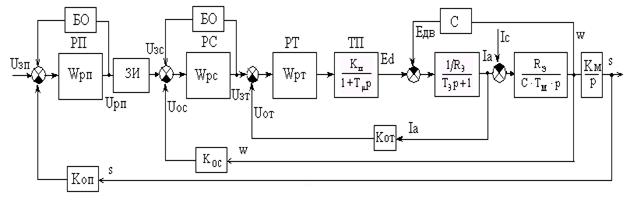 |
В соответствии с принципами подчиненного регулирования, объект содержит три последовательных звена. В соответствии с этим САР трехконтурная.
 .
.
Упрощенная структурная схема трехконтурной САР:
Здесь задатчик интенсивности (ЗИ) ограничивает  или
или  на допустимом уровне. Возможны варианты без ЗИ.
на допустимом уровне. Возможны варианты без ЗИ.
1. Построение контуров тока и скорости.
1) Контур регулирования тока.
 ;
; 



 .
.
2) Контур регулирования скорости.
 П регулятор (пропорциональный).
П регулятор (пропорциональный).
При наличии нагрузки, имеется статическая ошибка  , которая определяет статическую ошибку положения или перемещения. Если
, которая определяет статическую ошибку положения или перемещения. Если  , то используют пропорционально-интегральный (ПИ) регулятор скорости (или пропорционально-дифференциальный).
, то используют пропорционально-интегральный (ПИ) регулятор скорости (или пропорционально-дифференциальный).
 ;
; 
 ;
;
2. Построение контура регулирования положения.
Основные требования САР положения: максимальное быстродействие, отсутствие перерегулирования в положениях. Эти требования для всех возможных режимов работы, при использовании линейного пропорционального регулятора положения могут не выполняться.
 если все
если все  линейны.
линейны.
Различают следующие режимы работы позиционных САР:
1) Режим малых перемещений. В нем система линейна, то есть не проявляется ни одно из ограничений.
2) Режим средних перемещений. В этом случае ЗИ ограничивает на допустимом уровне  .
.
Если нет ЗИ, то осуществляется работа под отсечку, то есть ограничен допустимый ток. При работе с ЗИ так же возможна работа под отсечку. Скорость не доходит до 
3) Режим больших перемещений. Скорость доходит до  , то есть
, то есть  , которую определяет блок ограничения. Здесь проявляются и другие ограничения
, которую определяет блок ограничения. Здесь проявляются и другие ограничения  и тока.
и тока.
Режим средних перемещений:
Для качественной отработки средних перемещений необходимо, чтобы торможение происходило с постоянным ускорением.
 Если рассматривать торможение, то для любого момента торможения с заданными начальными условиями можно записать:
Если рассматривать торможение, то для любого момента торможения с заданными начальными условиями можно записать:
 |
Средние перемещения: Угловые перемещения:
 | |||||||||
 | |||||||||
 |  |  | |||||||
Режим малых перемещений:
Система разомкнута, ЗИ — в режиме слежения
С П-РС

 ,
,  — токовый контур.
— токовый контур.


Основным из требований САР – отсутствие перерегулирования по положению.
Поэтому передаточная функция РП
 , при этом
, при этом 
 , с ПИ-РС
, с ПИ-РС 