СОДЕРЖАНИЕ
РАЗДЕЛ 2 ВЫПОЛНЕНИЕ ИНДИВИДУАЛЬНОГО ЗАДАНИЯ.. 2
ПК 2.1. Создавать программы на языке ассемблера для микропроцессорных систем 2-3
ПК 2.2. Производить тестирование и отладку микропроцессорных систем…………………………………………………………………….……4-6
ПК 2.3.Осуществлять установку и конфигурирование персональных компьютеров и подключение периферийных устройств………………..…...6-7
ПК 2.4. Выявлять причины неисправности периферийного
Оборудования………………………………………………………………….7
 2 Раздел. Отчёт за индивидуальные задания
2 Раздел. Отчёт за индивидуальные задания
2.1. Программирование на языке assembler:
Микроконтроллера Atmel AVR: «Сформировать заданное значение частоты таймера 1 Кгц»
Чтобы получить частоту 1 Кгц, нужно 1 поделить на 62,5. Нецелое число отсчетов в таймере организовать сложно. Для этого можно начинать с числа 194, что до переполнения (значения 256, т. е. 0 в счетном регистре) даст 62 отсчета. Еще пол-отсчета можно сделать, если сменить частоту на входе таймера на более высокую при этом следует еще учесть количество тактов, необходимое для перестройки таймера.
Для точной подгонки частоты можно выбрать подходящее значение тактовой частоты МК: так, "кварц" с частотой 4096 кГц даст при делении на 64 ровно 64 кГц, и делить придется уже на целое число. Тогда можем выбрать более высокую частоту на входе счетчика. Если установить коэффициент предделителя 1/8, то из 4 МГц получим 500 кГц, которые поделим на 250 описанным ранее методом и отсчитаем два таких цикла переполнения.
Нужно с частотой 1 кГц переключать внешний вывод МК (вывод PD6) рисунок 1. Чтобы частота переключения была 1 кГц, нам необходимо за один период переключить вывод дважды (от высокого к низкому уровню и обратно).
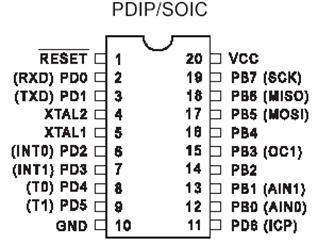
Рисунок 1. Расположение выводов микроконтроллера AT90S2313
.device AT90S2313
.include "2313def.inc";частота 4 Мгц
.equ K_div = 250
;коэффициент деления Кдел
.def rK_div = r16;рабочая ячейка для Кдел
.def count = r17;счетчик до 2
.def temp = r18;рабочая переменная
;===== прерывания
rjmp Reset;вектор сброса
.org $006;по адресу $006 прерывание переполнения Timer0
rjmp TIM0
;====== начало программы
.org $00С
TIM0:;прерывание Timer0
inc count
sbrs count,0;если счетчик нечетный, пропустить
sbr temp, 0b01000000; иначе установить бит 6
sbrc count,0;если счетчик четный, пропустить
cbr temp, 0b01000000;иначе сбросить бит 6
out PortD,temp;вывести в порт D
out TCNT0,rK_div;"заряжаем" таймер
reti;конец прерывания таймера
Reset:
ldi temp,low(RAMEND);загрузка указателя стека
out SPL,temp
ldi temp, 0b01000000;шестой разряд порта D на выход
out DDRD,temp
clr count;очищаем
clr temp;регистры
ldi temp, (1<<TOIE0);разр. прерывания Timer0
out TIMSK,temp
ldi rK_div,K_div;значение к. деления (250)
neg rK_div;256-K_div, т. к. счетчик суммирующий
out TCNT0,rK_div;"заряжаем" таймер
ldi temp, 0b00000010;Timer0 включить 1:8
out TCCR0,temp
sei
Cykle:
rjmp cykle
ldi count,2
 |
Тестирование и отладка микропроцессорных систем
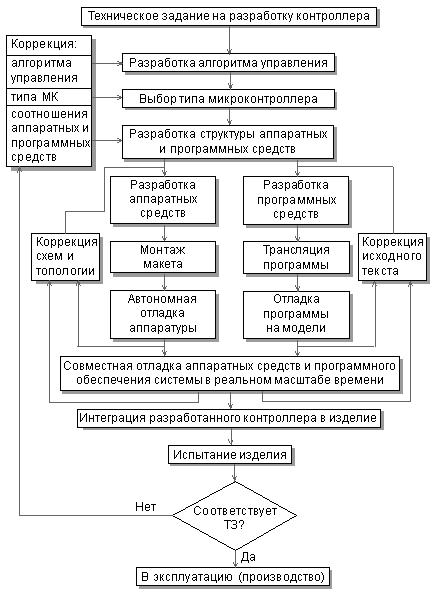
Разработать алгоритм отладки микропроцессорных систем
Начало разработки является наиболее ответственным, трудоемким и требует высокой квалификации разработчиков, так как ошибки, допущенные на этом этапе, обычно обнаруживаются лишь на стадии испытания законченного образца и требуют длительной и дорогостоящей переработки всей системы.
Одной из главных задач этого этапа является распределение функций, выполняемых микропроцессорной системой, между ее аппаратной и программной частями. Максимальное использование аппаратных средств упрощает разработку и обеспечивает высокое быстродействие системы в целом, но сопровождается, как правило, увеличением стоимости и потребляемой мощности. В то же время увеличение удельного веса программного обеспечения позволяет сократить число устройств системы, ее стоимость, повышает возможность адаптации системы к новым условиям применения, но приводит к увеличению необходимой емкости памяти, снижению быстродействия, увеличению сроков проектирования.
 Проектирования контроллеров на базе МК полностью соответствует принципу неразрывного проектирования и отладки аппаратных и программных средств, принятому в микропроцессорной технике. Это означает, что перед разработчиком такого рода МПС стоит задача реализации полного цикла проектирования, начиная от разработки алгоритма функционирования и заканчивая комплексными испытаниями в составе изделия а, возможно, и сопровождением при производстве.
Проектирования контроллеров на базе МК полностью соответствует принципу неразрывного проектирования и отладки аппаратных и программных средств, принятому в микропроцессорной технике. Это означает, что перед разработчиком такого рода МПС стоит задача реализации полного цикла проектирования, начиная от разработки алгоритма функционирования и заканчивая комплексными испытаниями в составе изделия а, возможно, и сопровождением при производстве.
В техническом задании формулируются требования к контроллеру с точки зрения реализации определенной функции управления. Техническое задание включает в себя набор требований, который определяет, что пользователь хочет от контроллера и что разрабатываемый прибор должен делать.
Техническое задание может иметь вид текстового описания, не свободного в общем случае от внутренних противоречий.
На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером для пользователя после завершения проектирования, уточняя тем самым, насколько устройство соответствует предъявляемым требованиям. Она включает в себя описания форматов данных, как на входе, так и на выходе, а также внешние условия, управляющие действиями контроллера.
 Спецификация и требования пользователя являются критериями оценки функционирования контролера после завершения проектирования. Может потребоваться проведение нескольких итераций, включающих обсуждение требований и функциональной спецификации с потенциальными пользователями контроллера, и соответствующую коррекцию требований и спецификации. Требования к типу используемого МК формулируются на данном этапе чаще всего в неявном виде.
Спецификация и требования пользователя являются критериями оценки функционирования контролера после завершения проектирования. Может потребоваться проведение нескольких итераций, включающих обсуждение требований и функциональной спецификации с потенциальными пользователями контроллера, и соответствующую коррекцию требований и спецификации. Требования к типу используемого МК формулируются на данном этапе чаще всего в неявном виде.
Этап разработки алгоритма управления является наиболее ответственным, поскольку ошибки данного этапа обычно обнаруживаются только при испытаниях законченного изделия и приводят к необходимости дорогостоящей переработки всего устройства.
После разработки структуры аппаратных и программных средств дальнейшая работа над контроллером может быть распараллелена. Разработка аппаратных средств включает в себя разработку общей принципиальной схемы, разводку топологии плат, монтаж макета и его автономную отладку. Время выполнения этих этапов зависит от имеющегося набора апробированных функционально-топологических модулей, опыта и квалификации разработчика. На этапе ввода принципиальной схемы и разработки топологии используются, как правило, распространенные системы проектирования типа «ACCEL EDA» или «OrCad».
Автономная отладка аппаратуры на основе МК с открытой
Архитектурой предполагает контроль состояния многоразрядных магистралей адреса и данных с целью проверки правильности обращения к внешним ресурсам памяти и периферийным устройствам. Закрытая архитектура МК предполагает реализацию большинства функций разрабатываемого устройства внутренними средствами микроконтроллера. Поэтому разрабатываемый контроллер будет иметь малое число периферийных ИС, а обмен с ними будет идти преимущественно по последовательным интерфейсам. Здесь на первыйплан выйдут вопросы согласования по нагрузочной способности  параллельных портов МК и отладка алгоритмов обмена поподовательным
параллельных портов МК и отладка алгоритмов обмена поподовательным