Электромеханический преобразователь (ЭМП) служит для того, чтобы изменять гидравлическое сопротивление рабочей жидкости, протекающей через управляющий зазор между золотником и корпусом путем преобразования электрического управляющего сигнала в механическое движение силового элемента. На рисунке 7 показаны основные типы электромеханических преобразователей.
В преобразователе с подвижной катушкой используется электродинамический принцип, при котором протекающий по катушке ток в магнитном поле преобразует энергию в усилие перемещения. Большого распространения ЭМП с подвижной катушкой не получил из-за больших габаритов [43, 62].
В гидроусилителях типа “сопло-заслонка” и “струйная трубка” применяют моментные поляризованные поворотные ЭМП двух видов с дифференциальной намоткой управляющих катушек. У этих ЭМП работа магнитного поля определяется электромагнитами или постоянными магнитами [16, 43, 62].
Первый, так называемый электромагнит “мокрого” типа, широко распространен из-за простоты регулировки и управления и хорошей повторяемости характеристик. Его название связано с тем, что рабочая жидкость находится внутри магнита между полюсными наконечниками. Недостатки данного ЭМП заключаются в том, что имеются дополнительные обмотки подмагничивания, повышенная чувствительность якоря к линейным ускорениям, жесткие допуски в зазорах полюсов магнита. Второй тип – “сухой” поляризованный ЭМП на постоянных магнитах находит большее распространение в настоящее время, т.к. он лишен вышеизложенных недостатков и имеет значительно меньшие размеры. Конструкция поворотного ЭМП представлена на рис. 1.
В источниках [16, 42, 43, 62] достаточно подробно изложены достоинства и недостатки ЭМП с подвижной катушкой и поворотного типа, а также детально рассмотрены их расчет и динамические характеристики. Данные типы преобразователей за свою долгую историю были оптимизированы многими фирмами – производителями и достигли своих предельных характеристик, приведенных на рис. 1.
У моментного ЭМП поворотного типа и линейного двигателя работа магнитного поля определяется электромагнитами или постоянными магнитами [43, 61].

Рис. 1. Конструктивные схемы и технические параметры электромеханических преобразователей
В качестве ЭМП возможно также применение линейного двигателя (ЛД), конструкция и технические характеристики которого представлены на рис. 7. ЛД конструктивно сходен с электродвигателем вращательного действия и построен на принципе наслоения магнитного поля на полюсные магниты, но форма поля такова, что на якоре действует только продольная составляющая силы [62]. Данный тип преобразователя позволяет развивать усилие ~200 Н при перемещении ±1,4 мм. Ход якоря ограничен участком, имеющим постоянное усилие при неизменном токе управления. Линейный двигатель по сравнению с пропорциональным магнитом имеет габариты в несколько раз большие. Применение постоянных редкоземельных магнитов (на основе соединений типа Fe-Nd-B или Sm-Co) позволяет получить двигатели, имеющие усилия и динамические характеристики большие, чем у пропорциональных магнитов при тех же габаритах, но вызывает удорожание двигателя в несколько раз. Их широкому распространению мешает высокая стоимость, больше, чем на порядок, превышающая цену пропорциональных магнитов и делает применение линейного двигателя в качестве ЭМП экономически нецелесообразным.
В гидроаппаратах с пропорциональным электрическим управлением в качестве устройства, преобразующего входной управляющий электрический сигнал по току в механический сигнал по усилию или по перемещению, применяют линейные пропорциональные электромагниты. Электромагнит называют пропорциональным, т.к. усилие на якоре пропорционально величине электрического тока в катушке управления электромагнита. При фиксированном токе управления усилие на якоре пропорционального электромагнита остается постоянным на протяжении всего хода якоря.
В одной из наиболее широко распространенных конструкций пропорционального магнита, применяемого в простейших пропорциональных распределителях, данная форма рабочей характеристики получается за счет особой формы конических полюсов магнита [39]. Пропорциональные электромагниты относятся к электромагнитам толкающего типа с якорем, работающим в масле, поэтому отпадает необходимость в уплотнении толкателя якоря и тем самым снижаются силы трения при работе электромагнита и гистерезис его характеристики. В связи с тем, что приходится применять на распределителе два толкающих магнита, необходимо использовать электронный усилитель, управляющий в зависимости от знака сигнала управления одним из двух магнитов.
Линейный пропорциональный электромагнит, применяемый в регулирующих распределителях, состоит из катушки управления, в которую вставлена гильза, подвижного якоря с направлявшим толкателем, упора, корпуса и крышки. Его конструкция приведена на рисунке 2. Якорь расположен в полости гильзы, при этом концы его направляющего толкателя проходят через отверстия в прецизионных опорах, выполненных в виде втулок, установленных в гильзе и в упоре [39].
Для обеспечения пропорциональной характеристики магнитопроводам электромагнитов придают специальную форму. Путь магнитного потока частично прерывается кольцом из ненамагничиваемого материала, вставленного в разрыв магнитопровода. При этом силовые линии магнитного поля вынуждены проходить путь от направляющей трубки к сердечнику через радиальный воздушный зазор к якорю и оттуда через рабочий воздушный зазор. Одновременно часть магнитного потока в радиальном воздушном зазоре между якорем и ненамагничивающимся кольцом отклоняется и, таким образом, теряется часть силы. Эта часть тем больше, чем меньше длина хода якоря. При этом сила на якоре магнита, обычно возрастающая с уменьшением хода якоря, в некоторой области остается постоянной и не зависит от хода. Практически полной независимости усилия на якоре электромагнита от положения якоря удается добиться лишь на небольшой части хода 1,5¸2 мм, которая и используется в качестве рабочего перемещения якоря магнита (зона II рабочего хода) [35, 39, 47]. Тяговая характеристика пропорционального магнита приведена на рисунке 3.

Рис. 2. Конструктивная схема пропорционального магнита
1 – Катушка; 2 – Направляющая трубка; 3 – якорь; 4 – немагнитное кольцо; 5 – корпус; 6 – сердечник

Рис. 3. Тяговая характеристика пропорционального магнита
1 – простой линейный магнит, 2 – пропорциональный магнит
Пропорциональные электромагниты являются электромагнитами постоянного тока, т.к. у электромагнитов переменного тока величина тока в катушке управления зависит от положения якоря и имеет максимальное значение в положении, максимально приближенном к полюсу магнита [35, 39].
Для исключения влияния на величину тока в катушке электромагнита возмущающих воздействий, таких как колебания напряжения питания электронного блока управления или изменение сопротивления катушек электромагнита вследствие изменения температуры, применяется обратная связь по току [35, 50]. Его конструкция приведена на рисунке 4.
Широко применяются пропорциональные электромагниты, у которых на рабочем участке характеристики при фиксированном токе управления усилие, создаваемое на якоре, уменьшается на 5¸10 % по мере его выдвижения. У таких электромагнитов рабочий участок хода якоря составляет 3¸5 мм. Поэтому эти электромагниты используются для непосредственного управления золотником в пропорциональных распределителях прямого действия [35, 39].
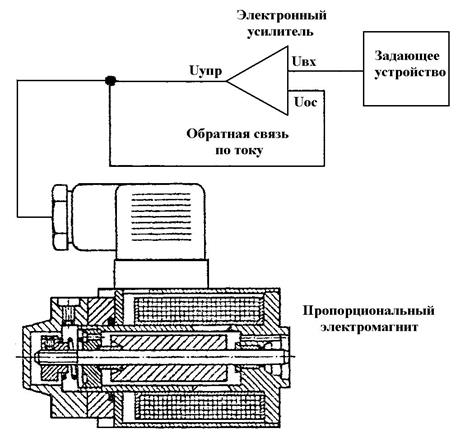
Рис. 4. Пропорциональный электромагнит с обратной связью по току
Для повышения точности установки якоря пропорционального электромагнита и снижения гистерезиса его характеристики выпускают пропорциональные электромагниты с индуктивным датчиком перемещения якоря. Сигнал с катушки такого датчика подают на соответствующий вход электронного блока управления, организуя отрицательную обратную связь по перемещению якоря. Согласование начального рабочего положения якоря электромагнита и нулевого положения датчика перемещения производится механически путем осевого перемещения катушки датчика по отношению к его магнитному элементу. Его конструкция приведена на рисунке 5.
Промышленно выпускаемые пропорциональные электромагниты разделены на типоразмеры (габариты в плане) 35´35 мм с усилием не менее 50 Н при максимальном токе управления 0,85 А, 45´45 мм с усилием не менее 70 Н при максимальном токе управления 1 А и 60´60 мм с усилием не менее 145 Н при максимальном токе управления 1.5 А. Все перечисленные пропорциональные электромагниты имеют два исполнения: без датчика обратной связи и с датчиком обратной связи по перемещению якоря [35].

Рис. 5. Пропорциональный электромагнит с обратной связью по перемещению якоря.
Основным препятствием на пути повышения динамических характеристик пропорциональных магнитов является то, что для достижения достаточных усилий якорь имеет довольно большую массу. Повышение тока управления связано с увеличением количества витков, что приводит к увеличению индуктивности, с которой борются путем применения специальных схемотехнических решений в конструкции электронного усилителя для компенсации забросов напряжения при работе электромагнита. В настоящее время наилучшие динамические характеристики имеет пропорциональный магнит со встроенной электроникой фирмы Bosch. При 100 % входном сигнале он имеет полосу пропускания до 60 Гц (при ослаблении АЧХ –3 дБ) [68].