· Оценка ошибок от помех, обусловленных широкополосными воздействиями;
· Эквивалентная полоса шумов.
При широкополосном спектре помехи, при котором в пределах пропускания системы Sf(w)=Sf(0), ошибка от помех с определенным приближением вычисляется по формуле:
где wш - полоса шумов или эффективная полоса пропускания системы.
Полоса шумов аналитически определяется выражением:
 ,
,
т.е. равна умноженному на p табличного интеграла I, полиномы числителя и знаменателя подинтегрального выражения которого совпадают с соответствующими полиномами передаточной функции замкнутой системы.
Для приближенных расчетов можно полагать wш=(1,5¸2,5)wс,
где wс - частота среза разомкнутой системы.
Для определения эффективной полосы пропускания используется программа (KP6.BAS - далее KP6), исходными данными для которой являются:
· расчетный коэффициент передачи (см. выше)
· коэффициенты передаточной функции a1, a2, a3
· настройки выбранного регулятора S0, S1, S2
Результатом работы программы KP6 будут следующие значения:
Вывод: на основе анализа качества переходных процессов, определяется оптимальный регулятор. В данном случае можно выбрать ПИД-регулятор с настройкой S2=0,00593.
Кривая разгона объекта
(нормированные значения)
Таблица 2 |
Кривая разгона объекта
(исходные значения)
Таблица 1 |
Кривая разгона модели
(расчетные значения)
Таблица 3 |
Отчет для построения кривых настроек регуляторов
Область параметров ПИ регулятора
Исходные данные:
Pасчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Степень колебательности m= 0,221
S2= 0
| частота | модуль | фаза | наст-ка S0 | наст-ка S1 |
| 0,01 | 2,419 | -2,097 | 0,000 | -0,410 |
| 0,04 | 2,4759 | -8,406 | 0,002 | -0,386 |
| 0,07 | 2,530 | -14,724 | 0,007 | -0,360 |
| 0,1 | 2,583 | -21,026 | 0,015 | -0,331 |
| 0,13 | 2,635 | -27,287 | 0,024 | -0,299 |
| 0,16 | 2,687 | -33,489 | 0,034 | -0,265 |
| 0,19 | 2,743 | -39,617 | 0,046 | -0,229 |
| 0,22 | 2,805 | -45,675 | 0,059 | -0,193 |
| 0,25 | 2,878 | -51,682 | 0,071 | -0,155 |
| 0,28 | 2,969 | -57,682 | 0,084 | -0,117 |
| 0,31 | 3,083 | -63,749 | 0,095 | -0,079 |
| 0,34 | 3,230 | -70,001 | 0,104 | -0,042 |
| 0,37 | 3,422 | -76,617 | 0,110 | -0,005 |
| 0,4 | 3,675 | -83,875 | 0,113 | 0,031 |
| 0,43 | 4,008 | -92,265 | 0,112 | 0,065 |
| 0,46 | 4,438 | -102,286 | 0,106 | 0,097 |
| 0,49 | 4,955 | -115,129 | 0,094 | 0,126 |
| 0,52 | 5,451 | -131,91 | 0,074 | 0,153 |
| 0,55 | 5.626 | -152,83 | 0,047 | 0,176 |
| 0,58 | 5,184 | -175,17 | 0,010 | 0,196 |
| 0,61 | 4,312 | -194,65 | -0,038 | 0,211 |
| 0,64 | 3,421 | -209,65 | -0,097 | 0,223 |
| 0,67 | 2,700 | -220,415 | -0,169 | 0,229 |
| 0,7 | 2,158 | -228,567 | -0,255 | 0,230 |
| 0,73 | 1,753 | -234,865 | -0,357 | 0,225 |
| 0,76 | 1,448 | -239,898 | -0,476 | 0,214 |
| 0,79 | 1,213 | -244,042 | -0,614 | 0,197 |
| 0,82 | 1,030 | -247,538 | -0,772 | 0,173 |
| 0,85 | 0,883 | -250,548 | -0,951 | 0,141 |
| 0,88 | 0,765 | -253,178 | -1,154 | 0,102 |
| 0,91 | 0,668 | -255,510 | -1,382 | 0,054 |
| 0,94 | 0,588 | -257,599 | -1,636 | -0,002 |
| 0,97 | 0,521 | -259,489 | -1,919 | -0,067 |
| 0,464 | -261,210 | -2,233 | -0,141 | |
| 1,03 | 0,415 | -262,788 | -2,578 | -0,225 |
| 1,06 | 0,373 | -264,243 | -2,958 | -0,320 |
| 1,09 | 0,337 | -265,591 | -3,375 | -0,425 |
|
Отчет для построения кривых настроек регуляторов
Область параметров ПИД регулятора
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Степень колебательности m= 0,221
S2= 0,00238
| частота | модуль | фаза | наст-ка S0 | наст-ка S1 |
| 0,01 | 2,41931 | -2,10 | 0,000 | -0,410 |
| 0,04 | 2,47599 | -8,41 | 0,002 | -0,386 |
| 0,07 | 2,530607 | -14,72 | 0,007 | -0,360 |
| 0,1 | 2,583366 | -21,03 | 0,015 | -0,331 |
| 0,13 | 2,635145 | -27,29 | 0,024 | -0,299 |
| 0,16 | 2,687607 | -33,49 | 0,035 | -0,265 |
| 0,19 | 2,743274 | -39,62 | 0,046 | -0,229 |
| 0,22 | 2,805588 | -45,68 | 0,059 | -0,192 |
| 0,25 | 2,878994 | -51,68 | 0,072 | -0,155 |
| 0,28 | 2,969124 | -57,68 | 0,084 | -0,117 |
| 0,31 | 3,083124 | -63,75 | 0,095 | -0,079 |
| 0,34 | 3,230204 | -70,00 | 0,104 | -0,041 |
| 0,37 | 3,42241 | -76,62 | 0,111 | -0,004 |
| 0,4 | 3,675425 | -83,88 | 0,114 | 0,031 |
| 0,43 | 4,00833 | -92,21 | 0,113 | 0,065 |
| 0,46 | 4,438153 | -102,29 | 0,107 | 0,097 |
| 0,49 | 4,955457 | -115,13 | 0,094 | 0,127 |
| 0,52 | 5,451741 | -131,91 | 0,075 | 0,153 |
| 0,55 | 5,626274 | -152,83 | 0,048 | 0,177 |
| 0,58 | 5,184927 | -175,17 | 0,011 | 0,196 |
| 0,61 | 4,312033 | -194,65 | -0,037 | 0,212 |
| 0,64 | 3,42142 | -209,50 | -0,096 | 0,223 |
| 0,67 | 2,700989 | -220,42 | -0,168 | 0,230 |
| 0,7 | 2,158469 | -228,57 | -0,254 | 0,231 |
| 0,73 | 1,753828 | -234,87 | -0,356 | 0,226 |
| 0,76 | 1,448437 | -239,90 | -0,475 | 0,215 |
| 0,79 | 1,213792 | -244,04 | -0,612 | 0,198 |
| 0,82 | 1,030149 | -247,54 | -0,770 | 0,173 |
| 0,85 | 0,883942 | -250,55 | -0,949 | 0,142 |
| 0,88 | 0,765739 | -253,18 | -1,152 | 0,103 |
| 0,91 | 0,668874 | -255,51 | -1,379 | 0,055 |
| 0,94 | 0,588541 | -257,60 | -1,634 | -0,001 |
| 0,97 | 0,521213 | -259,49 | -1,917 | -0,066 |
| 0,464253 | -261,21 | -2,230 | -0,140 | |
| 1,03 | 0,415663 | -262,79 | -2,576 | -0,224 |
| 1,06 | 0,373901 | -264,24 | -2,956 | -0,319 |
| 1,09 | 0,337766 | -265,59 | -3,372 | -0,424 |
| 1,12 | 0,306308 | -266,85 | -3,826 | -0,540 |
| 1,15 | 0,278769 | -268,02 | -4,321 | -0,667 |
| 1,18 | 0,254539 | -269,11 | -4,858 | -0,806 |
Отчет для построения кривых настроек регуляторов
Область параметров ПИД регулятора
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Степень колебательности m= 0,221
S2= 0,00356
| частота | модуль | фаза | наст-ка S0 | наст-ка S1 |
| 0,01 | 2,41931 | -2,09765 | 1,59E-04 | -0,4097 |
| 0,04 | 2,47599 | -8,40679 | 2,48E-03 | -0,38643 |
| 0,07 | 2,530607 | -14,7243 | 7,39E-03 | -0,35988 |
| 0,1 | 2,583366 | -21,0262 | 1,46E-02 | -0,33047 |
| 0,13 | 2,635145 | -27,288 | 0,023785 | -0,2986 |
| 0,16 | 2,687607 | -33,489 | 3,45E-02 | -0,26469 |
| 0,19 | 2,743274 | -39,6176 | 4,65E-02 | -0,22913 |
| 0,22 | 2,805588 | -45,6754 | 5,90E-02 | -0,19235 |
| 0,25 | 2,878994 | -51,6824 | 7,17E-02 | -0,15474 |
| 0,28 | 2,969124 | -57,6822 | 8,39E-02 | -0,11671 |
| 0,31 | 3,083124 | -63,7494 | 9,49E-02 | -7,87E-02 |
| 0,34 | 3,230204 | -70,0013 | 0,104172 | -4,10E-02 |
| 0,37 | 3,42241 | -76,6177 | 0,110823 | -4,22E-03 |
| 0,4 | 3,675425 | -83,8752 | 0,114092 | 3,14E-02 |
| 0,43 | 4,00833 | -92,2056 | 0,113123 | 0,065372 |
| 0,46 | 4,438153 | -102,287 | 0,107009 | 9,73E-02 |
| 0,49 | 4,955457 | -115,13 | 9,48E-02 | 0,126844 |
| 0,52 | 5,451741 | -131,913 | 7,55E-02 | 0,153514 |
| 0,55 | 5,626274 | -152,834 | 4,79E-02 | 0,17693 |
| 0,58 | 5,184927 | -175,171 | 1,11E-02 | 0,196683 |
| 0,61 | 4,312033 | -194,651 | -3,61E-02 | 0,212366 |
| 0,64 | 3,42142 | -209,504 | -9,51E-02 | 0,223571 |
| 0,67 | 2,700989 | -220,416 | -0,167 | 0,22989 |
| 0,7 | 2,158469 | -228,568 | -0,25319 | 0,230915 |
| 0,73 | 1,753828 | -234,865 | -0,35503 | 0,226239 |
| 0,76 | 1,448437 | -239,899 | -0,47396 | 0,215453 |
| 0,79 | 1,213792 | -244,042 | -0,61144 | 0,19815 |
| 0,82 | 1,030149 | -247,538 | -0,76903 | 0,173922 |
| 0,85 | 0,883942 | -250,547 | -0,94829 | 0,142361 |
| 0,88 | 0,765739 | -253,178 | -1,15088 | 0,103059 |
| 0,91 | 0,668874 | -255,51 | -1,37846 | 5,56E-02 |
| 0,94 | 0,588541 | -257,6 | -1,6328 | -3,98E-04 |
| 0,97 | 0,521213 | -259,489 | -1,91567 | -0,06537 |
| 0,464253 | -261,21 | -2,22893 | -0,13971 | |
| 1,03 | 0,415663 | -262,788 | -2,57447 | -0,22383 |
| 1,06 | 0,373901 | -264,243 | -2,95425 | -0,31814 |
| 1,09 | 0,337766 | -265,591 | -3,37025 | -0,42305 |
| 1,12 | 0,306308 | -266,845 | -3,82454 | -0,53896 |
| 1,15 | 0,278769 | -268,016 | -4,31923 | -0,66628 |
| 1,18 | 0,254539 | -269,113 | -4,85646 | -0,80542 |
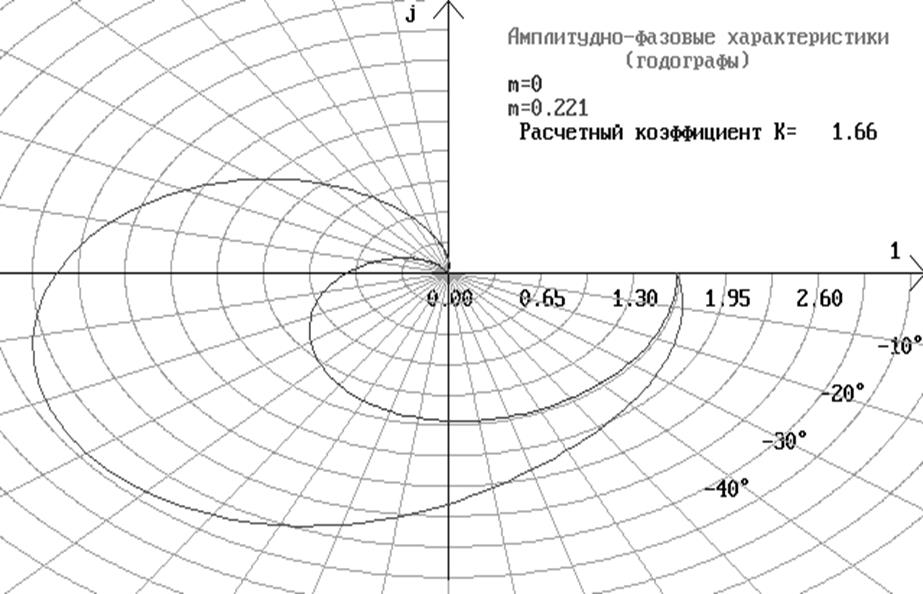
Отчет для построения кривых настроек регуляторов
Область параметров ПИД регулятора
Исходные данные:
Расчетный коэффициент K= 1,6666
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Степень колебательности m= 0,221
S2= 0,00593
| частота | модуль | фаза | наст-ка S0 | наст-ка S1 |
| 0,01 | 2,41931 | -2,09765 | 1,59E-04 | -0,40969 |
| 0,04 | 2,47599 | -8,40679 | 2,49E-03 | -0,38638 |
| 0,07 | 2,530607 | -14,7243 | 7,40E-03 | -0,3598 |
| 0,1 | 2,583366 | -21,0262 | 1,46E-02 | -0,33036 |
| 0,13 | 2,635145 | -27,288 | 2,38E-02 | -0,29846 |
| 0,16 | 2,687607 | -33,489 | 3,46E-02 | -0,26452 |
| 0,19 | 2,743274 | -39,6176 | 4,65E-02 | -0,22893 |
| 0,22 | 2,805588 | -45,6754 | 5,91E-02 | -0,19212 |
| 0,25 | 2,878994 | -51,6824 | 7,18E-02 | -0,15448 |
| 0,28 | 2,969124 | -57,6822 | 8,41E-02 | -0,11642 |
| 0,31 | 3,083124 | -63,7494 | 9,52E-02 | -7,84E-02 |
| 0,34 | 3,230204 | -70,0013 | 0,104459 | -0,04069 |
| 0,37 | 3,42241 | -76,6177 | 0,111164 | -3,84E-03 |
| 0,4 | 3,675425 | -83,8752 | 0,11449 | 3,18E-02 |
| 0,43 | 4,00833 | -92,2056 | 0,113583 | 6,58E-02 |
| 0,46 | 4,438153 | -102,287 | 0,107535 | 9,78E-02 |
| 0,49 | 4,955457 | -115,13 | 9,54E-02 | 0,127358 |
| 0,52 | 5,451741 | -131,913 | 7,61E-02 | 0,154059 |
| 0,55 | 5,626274 | -152,834 | 4,87E-02 | 0,177506 |
| 0,58 | 5,184927 | -175,171 | 0,01197 | 0,197291 |
| 0,61 | 4,312033 | -194,651 | -3,52E-02 | 0,213005 |
| 0,64 | 3,42142 | -209,504 | -0,09407 | 0,224241 |
| 0,67 | 2,700989 | -220,416 | -0,16588 | 0,230592 |
| 0,7 | 2,158469 | -228,568 | -0,25197 | 0,231648 |
| 0,73 | 1,753828 | -234,865 | -0,35371 | 0,227003 |
| 0,76 | 1,448437 | -239,899 | -0,47252 | 0,216249 |
| 0,79 | 1,213792 | -244,042 | -0,60989 | 0,198977 |
| 0,82 | 1,030149 | -247,538 | -0,76736 | 0,174781 |
| 0,85 | 0,883942 | -250,547 | -0,9465 | 0,143251 |
| 0,88 | 0,765739 | -253,178 | -1,14895 | 0,103981 |
| 0,91 | 0,668874 | -255,51 | -1,37641 | 5,66E-02 |
| 0,94 | 0,588541 | -257,6 | -1,6306 | 5,87E-04 |
| 0,97 | 0,521213 | -259,489 | -1,91333 | -6,44E-02 |
| 0,464253 | -261,21 | -2,22645 | -0,13866 | |
| 1,03 | 0,415663 | -262,788 | -2,57184 | -0,22276 |
| 1,06 | 0,373901 | -264,243 | -2,95145 | -0,31703 |
| 1,09 | 0,337766 | -265,591 | -3,3673 | -0,42191 |
| 1,12 | 0,306308 | -266,845 | -3,82142 | -0,53779 |
| 1,15 | 0,278769 | -268,016 | -4,31594 | -0,66508 |
| 1,18 | 0,254539 | -269,113 | -4,853 | -0,80418 |
Настройки ПИД регулятора при S2=0,00238
Настройки ПИД регулятора при S2=0,00356

Настройки ПИД регулятора при S2=0,00593
Отчет для построения кривых переходных процессов
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Коэффициент усиления К2= 0,7
Постоянная времени T= 1,2
Настройки регуляторов:
S0= 0,09283
S1= 0,1279413
S2= 0
Изменение задания регулятору: 5
Изменение расхода продукта 20 % х,р,о,
Число уравнений n= 5
Шаг интегрирования h= 0,1
Шаг печати w1= 0
Конечное значение по времени w2= 50
| Задающее воздействие | Возмущающее воздействие | ||
| x | y | x | y |
| 0; | 0; | ||
| 1; | 1; | 6,805556 | |
| 2; | 0,207847 | 2; | 10,17816 |
| 3; | 0,740829 | 3; | 11,30793 |
| 4; | 1,586245 | 4; | 10,78865 |
| 5; | 2,627476 | 5; | 9,077655 |
| 6; | 3,69438 | 6; | 6,658159 |
| 7; | 4,618649 | 7; | 4,037727 |
| 8; | 5,278315 | 8; | 1,676147 |
| 9; | 5,62199 | 9; | -9,37E-02 |
| 10; | 5,670699 | 10; | -1,11443 |
| 11; | 5,501238 | 11; | -1,40813 |
| 12; | 5,218861 | 12; | -1,13878 |
| 13; | 4,92813 | 13; | -0,54898 |
| 14; | 4,709462 | 14; | 0,109698 |
| 15; | 4,60595 | 15; | 0,634962 |
| 16; | 4,621637 | 16; | 0,908885 |
| 17; | 4,729349 | 17; | 0,906109 |
| 18; | 4,884283 | 18; | 0,678591 |
| 19; | 5,038908 | 19; | 0,325324 |
| 20; | 5,155327 | 20; | -0,04264 |
| 21; | 5,212651 | 21; | -0,33251 |
| 22; | 5,208658 | 22; | -0,48905 |
| 23; | 5,156527 | 23; | -0,50064 |
| 24; | 5,078476 | 24; | -0,39326 |
| 25; | 4,998498 | 25; | -0,21651 |
| 26; | 4,936163 | 26; | -0,02678 |
| 27; | 4,902766 | 27; | 0,127911 |
| 28; | 4,900282 | 28; | 0,217823 |
| 29; | 4,922804 | 29; | 0,234977 |
| 30; | 4,959602 | 30; | 0,190613 |
| 31; | 4,998715 | 31; | 0,108511 |
| 32; | 5,030114 | 32; | 1,66E-02 |
| 33; | 5,04773 | 33; | -6,05E-02 |
| 34; | 5,050113 | 34; | -0,10715 |
| 35; | 5,039821 | 35; | -0,11815 |
| 36; | 5,02197 | 36; | -9,82E-02 |
| 37; | 5,00246 | 37; | -5,85E-02 |
| 38; | 4,986377 | 38; | -0,01274 |
| 39; | 4,976922 | 39; | 2,67E-02 |
| 40; | 4,975026 | 40; | 5,14E-02 |
| 41; | 4,979587 | 41; | 5,86E-02 |
| 42; | 4,988163 | 42; | 5,01E-02 |
| 43; | 4,997841 | 43; | 3,11E-02 |
| 44; | 5,00604 | 44; | 8,55E-03 |
| 45; | 5,011073 | 45; | -0,01143 |
| 46; | 5,012372 | 46; | -0,0245 |
| 47; | 5,010393 | 47; | -2,89E-02 |
| 48; | 5,006295 | 48; | -2,54E-02 |
| 49; | 5,001513 | 49; | -1,64E-02 |
| 50; | 4,997352 | 50; | -0,00528 |
Отчет для построения кривых переходных процессов
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Коэффициент усиления К2= 0,7
Постоянная времени T= 1,2
Настройки регуляторов:
S0= 0,0934
S1= 0,128459
S2= 0,00238
Изменение задания регулятору: 5
Изменение расхода продукта 20 % х,р,о,
Число уравнений n= 5
Шаг интегрирования h= 0,1
Шаг печати w1= 0
Конечное значение по времени w2= 50
| Задающее воздействие | Возмущающее воздействие | ||
| x | y | x | y |
| 0; | 0; | ||
| 1; | 1; | 6,805556 | |
| 2; | 0,208432 | 2; | 10,17275 |
| 3; | 0,744579 | 3; | 11,29314 |
| 4; | 1,596788 | 4; | 10,76044 |
| 5; | 2,64807 | 5; | 9,031765 |
| 6; | 3,726627 | 6; | 6,591256 |
| 7; | 4,661751 | 7; | 3,948855 |
| 8; | 5,329038 | 8; | 1,567868 |
| 9; | 5,675309 | 9; | -0,21502 |
| 10; | 5,720896 | 10; | -1,23945 |
| 11; | 5,543148 | 11; | -1,52606 |
| 12; | 5,248928 | 12; | -1,23956 |
| 13; | 4,945045 | 13; | -0,62525 |
| 14; | 4,714244 | 14; | 0,061254 |
| 15; | 4,601511 | 15; | 0,61315 |
| 16; | 4,611974 | 16; | 0,908562 |
| 17; | 4,718594 | 17; | 0,919553 |
| 18; | 4,87584 | 18; | 0,697303 |
| 19; | 5,034864 | 19; | 0,341809 |
| 20; | 5,156235 | 20; | -3,35E-02 |
| 21; | 5,217694 | 21; | -0,33284 |
| 22; | 5,216089 | 22; | -0,49802 |
| 23; | 5,164256 | 23; | -0,51522 |
| 24; | 5,084634 | 24; | -0,40936 |
| 25; | 5,001862 | 25; | -0,23018 |
| 26; | 4,93635 | 26; | -3,51E-02 |
| 27; | 4,900202 | 27; | 0,126103 |
| 28; | 4,895973 | 28; | 0,222071 |
| 29; | 4,91801 | 29; | 0,243442 |
| 30; | 4,955494 | 30; | 0,200743 |
| 31; | 4,996119 | 31; | 0,117748 |
| 32; | 5,029363 | 32; | 0,023024 |
| 33; | 5,048672 | 33; | -0,05796 |
| 34; | 5,052224 | 34; | -0,10833 |
| 35; | 5,04239 | 35; | -0,12213 |
| 36; | 5,024302 | 36; | -0,10352 |
| 37; | 5,004037 | 37; | -0,06365 |
| 38; | 4,98695 | 38; | -0,01654 |
| 39; | 4,976528 | 39; | 2,49E-02 |
| 40; | 4,973924 | 40; | 5,18E-02 |
| 41; | 4,978164 | 41; | 6,07E-02 |
| 42; | 4,986814 | 42; | 5,31E-02 |
| 43; | 4,996874 | 43; | 3,41E-02 |
| 44; | 5,00562 | 44; | 0,010874 |
| 45; | 5,011204 | 45; | -0,01024 |
| 46; | 5,012925 | 46; | -0,02452 |
| 47; | 5,011161 | 47; | -0,02993 |
| 48; | 5,007057 | 48; | -2,70E-02 |
| 49; | 5,002087 | 49; | -0,01809 |
| 50; | 4,997633 | 50; | -0,00665 |
Отчет для построения кривых переходных процессов
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Коэффициент усиления К2= 0,7
Постоянная времени T= 1,2
Настройки регуляторов:
S0= 0,0996
S1= 0,1173
S2= 0,00356
Изменение задания регулятору: 5
Изменение расхода продукта 20 % х,р,о,
Число уравнений n= 5
Шаг интегрирования h= 0,1
Шаг печати w1= 0
Конечное значение по времени w2= 50
| Задающее воздействие | Возмущающее воздействие | ||
| x | y | x | y |
| 0; | 0; | ||
| 1; | 1; | 6,805556 | |
| 2; | 0,196856 | 2; | 10,18048 |
| 3; | 0,720978 | 3; | 11,32415 |
| 4; | 1,575156 | 4; | 10,81017 |
| 5; | 2,652677 | 5; | 9,06633 |
| 6; | 3,783516 | 6; | 6,554642 |
| 7; | 4,789366 | 7; | 3,781038 |
| 8; | 5,531094 | 8; | 1,225986 |
| 9; | 5,938007 | 9; | -0,73982 |
| 10; | 6,015165 | 10; | -1,9148 |
| 11; | 5,831109 | 11; | -2,28287 |
| 12; | 5,492661 | 12; | -1,98658 |
| 13; | 5,11523 | 13; | -1,26965 |
| 14; | 4,796421 | 14; | -0,40682 |
| 15; | 4,598516 | 15; | 0,360414 |
| 16; | 4,542174 | 16; | 0,868762 |
| 17; | 4,61067 | 17; | 1,052121 |
| 18; | 4,761658 | 18; | 0,935225 |
| 19; | 4,942316 | 19; | 0,608327 |
| 20; | 5,103753 | 20; | 0,192355 |
| 21; | 5,21154 | 21; | -0,19563 |
| 22; | 5,250754 | 22; | -0,46891 |
| 23; | 5,225484 | 23; | -0,58513 |
| 24; | 5,154041 | 24; | -0,54716 |
| 25; | 5,061845 | 25; | -0,3933 |
| 26; | 4,974109 | 26; | -0,18127 |
| 27; | 4,910034 | 27; | 2,91E-02 |
| 28; | 4,879566 | 28; | 0,190003 |
| 29; | 4,882943 | 29; | 0,274656 |
| 30; | 4,912575 | 30; | 0,278987 |
| 31; | 4,956355 | 31; | 0,218211 |
| 32; | 5,001351 | 32; | 0,119452 |
| 33; | 5,036952 | 33; | 1,31E-02 |
| 34; | 5,056842 | 34; | -7,48E-02 |
| 35; | 5,059597 | 35; | -0,12765 |
| 36; | 5,048031 | 36; | -0,14038 |
| 37; | 5,02769 | 37; | -0,11811 |
| 38; | 5,005033 | 38; | -7,30E-02 |
| 39; | 4,985755 | 39; | -0,02009 |
| 40; | 4,973625 | 40; | 2,69E-02 |
| 41; | 4,970009 | 41; | 0,058231 |
| 42; | 4,974034 | 42; | 6,99E-02 |
| 43; | 4,983239 | 43; | 6,31E-02 |
| 44; | 4,994461 | 44; | 4,31E-02 |
| 45; | 5,004709 | 45; | 1,72E-02 |
| 46; | 5,011814 | 46; | -7,48E-03 |
| 47; | 5,01477 | 47; | -2,55E-02 |
| 48; | 5,013726 | 48; | -3,40E-02 |
| 49; | 5,009727 | 49; | -3,30E-02 |
| 50; | 5,004287 | 50; | -2,45E-02 |
Отчет для построения кривых переходных процессов
Исходные данные:
Расчетный коэффициент K= 2,4
Коэффициенты передаточной функции:
A1= 3,658
A2= 5,959215
A3= 7,185788
Коэффициент усиления К2=0,7
Постоянная времени T= 1,2
Настройки регуляторов:
S0=0,0943
S1=0,1292
S2=0,00593
Изменение задания регулятору: 5
Изменение расхода продукта 20 % х,р,о,
Число уравнений n= 5
Шаг интегрирования h=0,1
Шаг печати w1=0
Конечное значение по времени w2= 50
| Задающее воздействие | Возмущающее воздействие | ||
| x | y | x | y |
| 0; | 0; | ||
| 1; | 1; | 6,805556 | |
| 2; | 0,210396 | 2; | 10,16349 |
| 3; | 0,751454 | 3; | 11,26801 |
| 4; | 1,610999 | 4; | 10,71655 |
| 5; | 2,670409 | 5; | 8,970282 |
| 6; | 3,755843 | 6; | 6,51687 |
| 7; | 4,694847 | 7; | 3,868659 |
| 8; | 5,362087 | 8; | 1,489778 |
| 9; | 5,604475 | 9; | -0,28389 |
| 10; | 5,643333 | 10; | -1,29411 |
| 11; | 5,557549 | 11; | -1,56439 |
| 12; | 5,255634 | 12; | -1,26234 |
| 13; | 4,945732 | 13; | -0,63558 |
| 14; | 4,711337 | 14; | 5,89E-02 |
| 15; | 4,597522 | 15; | 0,614255 |
| 16; | 4,608925 | 16; | 0,909298 |
| 17; | 4,71766 | 17; | 0,917587 |
| 18; | 4,877262 | 18; | 0,691948 |
| 19; | 5,038105 | 19; | 0,333796 |
| 20; | 5,160294 | 20; | -4,26E-02 |
| 21; | 5,221473 | 21; | -0,34102 |
| 22; | 5,218711 | 22; | -0,50375 |
| 23; | 5,165261 | 23; | -0,51765 |
| 24; | 5,084034 | 24; | -0,40848 |
| 25; | 5,000062 | 25; | -0,22672 |
| 26; | 4,933982 | 26; | -0,03031 |
| 27; | 4,897925 | 27; | 0,130962 |
| 28; | 4,894311 | 28; | 0,225861 |
| 29; | 4,917242 | 29; | 0,245497 |
| 30; | 4,95563 | 30; | 0,200923 |
| 31; | 4,996945 | 31; | 0,116383 |
| 32; | 5,030538 | 32; | 0,020751 |
| 33; | 5,049832 | 33; | -6,04E-02 |
| 34; | 5,053076 | 34; | -0,11029 |
| 35; | 5,042775 | 35; | -0,12321 |
| 36; | 5,024206 | 36; | -0,10359 |
| 37; | 5,00357 | 37; | -6,29E-02 |
| 38; | 4,986293 | 38; | -1,52E-02 |
| 39; | 4,975878 | 39; | 0,026344 |
| 40; | 4,97344 | 40; | 0,053022 |
| 41; | 4,977934 | 41; | 0,061392 |
| 42; | 4,986849 | 42; | 5,32E-02 |
| 43; | 4,997117 | 43; | 3,38E-02 |
| 44; | 5,005971 | 44; | 1,02E-02 |
| 45; | 5,011558 | 45; | -1,10E-02 |
| 46; | 5,013194 | 46; | -0,02519 |
| 47; | 5,011295 | 47; | -3,03E-02 |
| 48; | 5,007047 | 48; | -2,71E-02 |
| 49; | 5,001964 | 49; | -1,79E-02 |
| 50; | 4,997448 | 50; | -6,29E-03 |
Метод Рунге-Кутта
ПИ-регулятор
 |
Передаточная функция регулятора запишется в виде:
Но, в соответствии со схемой выше:
где: 
тогда:


 ;
;


Пусть:
ПИД- регулятор
 |
Передаточная функция регулятора запишется в виде:

Но, в соответствии со схемой выше:
где: 
тогда:


 ;
;


Пусть:
[1] График кривой разгона объекта по исходным значениям на рис. А
[2] Графики кривых разгона объекта и модели на рис. Б
[3] Метод Рунге-Кутта для ПИ-, ПИД-регуляторов, заложенный в программе KP4 см. в приложениях
[4] Графики АФХ см. на рис. В