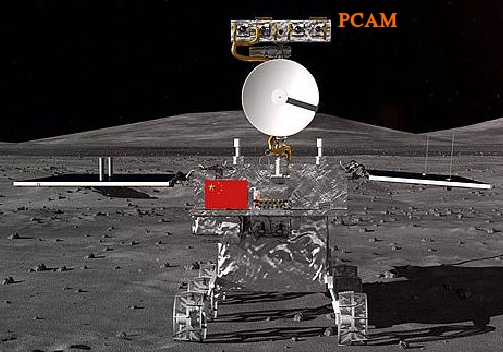
Панорамная камера PCAM (0.69 кг, размер 90х110х120 мм) установлена в самой верхней точке ровера «Юйту-2» на специальном широком кронштейне-мачте, который позволяет камере поворачиваться на 360 градусов вокруг своей оси для возможности фотофиксации панорамного вида поверхности.
Так как камера состоит из двух одинаковых модулей, то с их помощью составляется 3D-изображение, используя метод бинокулярного стереовидения. Для получения цветного изображения в камере PCAM используется фильтр Байера (массивов цветных фильтров).
Характеристики панорамной камеры PCAM:

Схема связи элементов панорамной камеры PCAM:

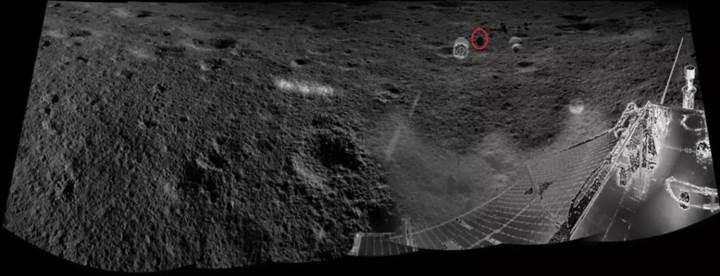
Общий вид панорамы поверхности с ровера «Юйту-2»:
Камера PCAM на ровере:
3 января 2019 года, после окончания всех этапов процедуры успешной посадки и установки независимых каналов связи с аппаратами «Чанъэ-4» (посадочным модулем и ровером), началась эра фото исследования обратной стороны Луны.
Фотографии с камер аппаратов:
Landing camera LCAM:
Terrain camera TCAM:
Panoramic camera PCAM (ровер):
Ровер «Юйту-2» является мобильным и очень продуктивным космическим партнером посадочного модуля «Чанъэ-4». Ровер «Юйту-2» проехал более 160 метров по сложной поверхности обратной стороны Луны.
Путь ровера «Юйту-2» за три лунных дня:


Интересно, как работают передние колеса на ровере «Юйту-2» при повороте на месте:


Видео спуска ровера «Юйту-2»
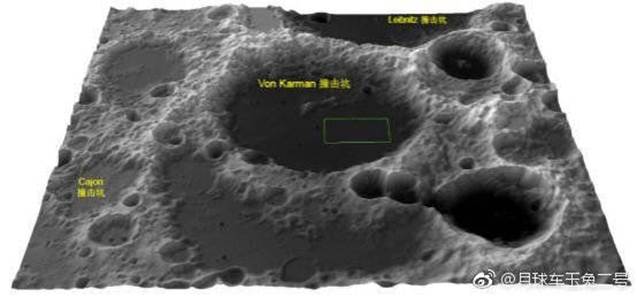
Место посадки миссии «Чанъэ-4»:

Поскольку обратная сторона Луны также имеет более сложный рельеф, чем видимая с Земли сторона, то в процессе движения по поверхности ровер «Юйту-2» столкнулся с более серьезными двигательными проблемами и помехами, по сравнению с теми, с которыми ранее сталкивался его предшественник ровер «Юйту», отправленный на Лунную поверхность в декабре 2013 году.
К сожалению, первый ровер «Юйту» миссии «Чанъэ-3», 25 января 2014 года был технически обездвижен (поломка элементов в результате столкновения) после преодоления 114,8 метра по сложной лунной поверхности.
Лунная поверхность в зоне высадки посадочного модуля «Чанъэ-4» изобилует складками, многочисленными камушками и небольшими кратерами, после совершения каждого своего небольшого движения, ровер «Юйту-2» должен остановиться, сфотографировать поверхность вокруг и отправить эти данные обратно на Землю через спутник-ретранслятор.
Ученые, операторы в ЦУПе и инженеры на Земле затем обрабатывают эти данные и намечают дальнейший маршрут, по которому ровер «Юйту-2» будет следовать далее.
Антенны ровера «Юйту-2» необходимо настроить так, чтобы они указывали на спутник-ретранслятор, для корректной отправки и получения управляющих сигналов, в то время как солнечные панели ровера должны быть оптимально наклонены для попадания на них большого количества солнечного света, чтобы максимизировать выработку электроэнергии в момент совершения передачи данных.

Шестиколесный ровер «Юйту-2»:
· общая масса ровера составляет около 140 кг (310 фунтов);
· грузоподъемность — около 20 кг (44 фунта);
· может перемещаться по наклонам и имеет автоматические датчики, предотвращающие столкновение с другими объектами;
· электроэнергией ровер обеспечивается с помощью двух солнечных батарей, позволяющих роверу работать в течение лунного дня;
· максимальная скорость 200 метров в час (данную скорость на Луне все равно не достигнуть – так как элементы на поверхности не дадут разогнаться и выведут из строя ровер раньше);
· максимальная площадь исследования – 3 кв. км;
· расчетное время работы – 3 месяца (2160 часов);
· максимальная расчетная дистанция – 10 км.

Колесные элементы ровера «Юйту-2» действительно являются его сложной конструктивной особенностью, которую еще на стадии проектирования пришлось долго дорабатывать инженерам Китайской академия космических технологий. Они отказались от использования гусениц, потому что они на тестах оказались менее ремонтопригодными и уязвимыми.
Например, если маленький камень попадет внутрь механизма гусеницы, то ровер может застрять и потерять ход. В отличие от колесной реализации, которая более надежна и имеет увеличенный ресурс, а также может безопасно переезжать камни высотой до 20 сантиметров.

Однако, если ровер «Юйту-2» перевернется, то он не сможет снова вернуться в рабочее положение. Солнечные панели на бортах лунного ровера очень хрупкие, они могут треснуть или покрыться пылью после падения, что приведет их в негодность.

Таким образом, в процессе удаленного управления роверов необходимо сосредоточиться на том, чтобы максимально удерживать положение ровера «Юйту-2» в стабильном состоянии и не допускать его падения при движении по поверхности.
А как же эти все камеры на посадочном модуле «Чанъэ-4» и ровере «Юйту-2» управляются, передают данные и получают электропитание? Про бортовые контроллеры и систему электропитания посадочного модуля и ровера.
Посадочный модуль «Чанъэ-4» и ровер «Юйту-2» имеют на своем борту специальные контроллеры полезной нагрузки (payload), которые используются для получения, хранения и контроля научных данных, поступающих с разных модулей и элементов аппаратов.
Далее, данные сигналов управления, научные и фото-данные с помощь интерфейсов RS-422 (телеметрия и управление) и LVDS (научные данные) передаются на центральные контроллеры посадочного модуля и ровера, которые их передают через систему связи в ЦУП на Земле, используя спутник-ретранслятор «Цэюцяо».

Контроллеры полезной нагрузки посадочного модуля «Чанъэ-4» и ровера «Юйту-2» оснащены центральным процессором и массивов ПЛИС (FPGA).
Также с помощью элементов контроллера полезной нагрузки происходит преобразование бортового напряжения +28В до напряжения для вторичных источников питания +5В, +-15В, +3.3В, а также постоянный контроль значений напряжений и температуры модулей контроллера и внешних устройств.
В качестве микропроцессора используется: ATMEL AT697F (Rad-Hard 32 bit SPARC V8 Processor).

В качестве программируемых логических интегральных схем (ПЛИС/FPGA) используются: массив из шести XILINX XQR2V3000-4CCG717 (Radiation-Hardened QPro Virtex-II FPGA).
Для дополнительной защиты микросхем от радиации используются алюминиевые экраны толщиной не менее 3.8 мм.
Схемы связи и передачи данных оборудования на посадочном модуле «Чанъэ-4»:

где:
— LFS — Low Frequency Spectrometer;
— LND — Lunar Lander Neutrons and Dosimetry;
— TCAM — Terrain Camera;
— LCAM — Landing Camera.
Схемы связи и передачи данных оборудования на ровере «Юйту-2»:
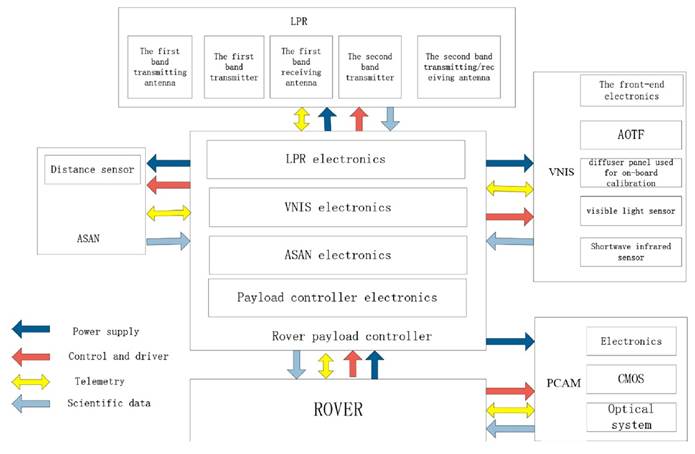
где:
— LPR — Lunar Penetrating Radar;
— ASAN — Advanced Small Analyzer for Neutrals;
— VNIS — Visible and Near-Infrared Imaging Spectrometer;
— PCAM — Panoramic Camera.
Кстати, ранее в публикациях уже рассказал о почти всем научном оборудоваНИИ спускаемого модуля и ровера, только один научный прибор остался еще инкогнито — LPR (Lunar penetrating radar) – который можно увидеть внешне, как два «усика» сзади на ровере.
Постараюсь об этом интересном устройстве еще написать отдельно публикацию.
