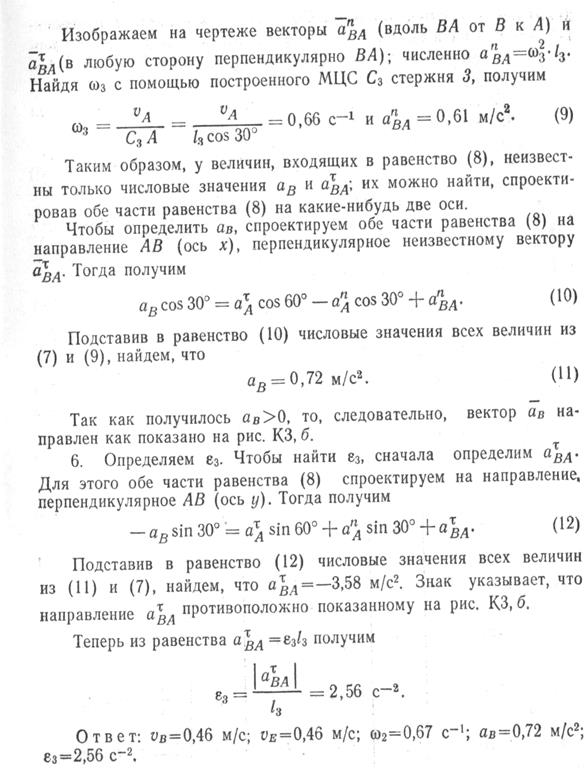
МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РОССИЙСКОЙ ФЕДЕРАЦИИ
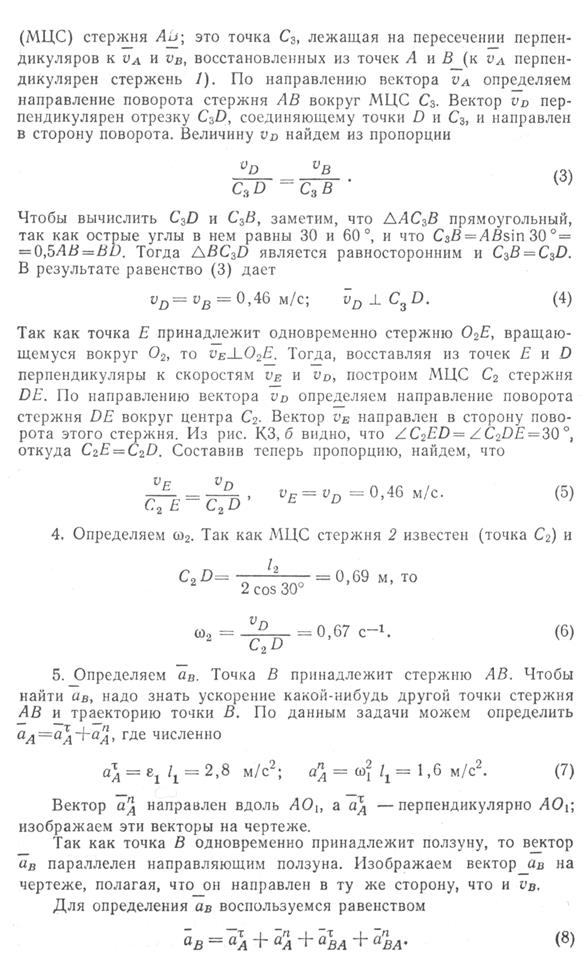
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ИЖЕВСКАЯ ГОСУДАТРСВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ АКАДЕМИЯ»
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Методические указания и контрольные задания
Для студентов-заочников инженерных специальностей
Составитель: ст. преподаватель каф. ТМСМ Н.В.Гусева
Содержание заданий, выбор вариантов, порядок выполнения работ, пояснения к тексту задач
Студенты выполняют контрольное задание, включающее 5 задач.
Задача С1 – равновесие под действием произвольной плоской системы сил.
Задача С2 – равновесие составной конструкции.
Задача К1 – кинематика поступательного и вращательного движения.
Задача К2 – кинематика плоского механизма.
Задача К3 – кинематика сложного движения точки.
К каждой задаче дается 10 рисунков и таблица (с тем же номером, что и задача), содержащая дополнительные к тексту задачи условие. Нумерация рисунков двойная, при этом номером рисунка является втораяя цифра.
Студент во всех задачах выбирает номер рисунка по последней цифре шифра, а номер условия в таблице – по предпоследней.
Контрольное задание выполняется в отдельной тетради. На обложке указываются:
название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет и специальность.
Чертеж к задаче выполняется с учетом условий решаемого варианта задачи; на нем все углы, действующие силы, число тел и их расположение на чертеже должны соответствовать этим условиям. Чертеж должен быть ясным и наглядным, а его размеры должны позволять ясно показывать все силы или векторы скорости, ускорения и др. Не забудьте на чертеже указать расположение координатных осей.
При выполнении задания все преобразования и числовые расчеты должны быть последовательно проделаны с необходимыми пояснениями, в конце должны быть даны ответы. Числовые данные подставлять в полученную расчетную формулу.
Студент с выполненной контрольной работой приходит на экзамен. Экзаменационная работа выполняется в этой же тетради и в конце экзамена сдается на проверку.
Задачи к контрольному заданию
Статика
Задача С1
Жесткая рама закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами на концах, или к шарнирной опоре на катках.
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом 40 кН. На раму действует пара сил с моментом М = 20 кН м и две силы, значения которых указаны в таблице. Учесть также силы тяжести стержней:  , где q = 2 кН/м – вес одного метра стержней (погонный вес);
, где q = 2 кН/м – вес одного метра стержней (погонный вес);  – длина каждого i -того стержня. Считая стержни однородными, силу тяжести каждого стержня прикладывать посередине его длины.
– длина каждого i -того стержня. Считая стержни однородными, силу тяжести каждого стержня прикладывать посередине его длины.
Определить реакции связей в точках А, В, вызываемые действующими нагрузками. При окончательных расчетах принять а =1,5 м.
Указания. Задача С1 – на равновесие тела под действием произвольной плоской системы сил. При ее решении учесть, что натяжение обеих ветвей нити, перекинутой через блок, когда трением пренебрегают, будут одинаковы. Чтобы уравнение моментов было более простым, нужно брать моменты относительно точки, в которой пересекаются линии действия двух реакций связей. При вычислении моментов силы, не параллельные выбранным координатным осям, удобно разложить на составляющие 
 , для которых плечи легко определяются.
, для которых плечи легко определяются.


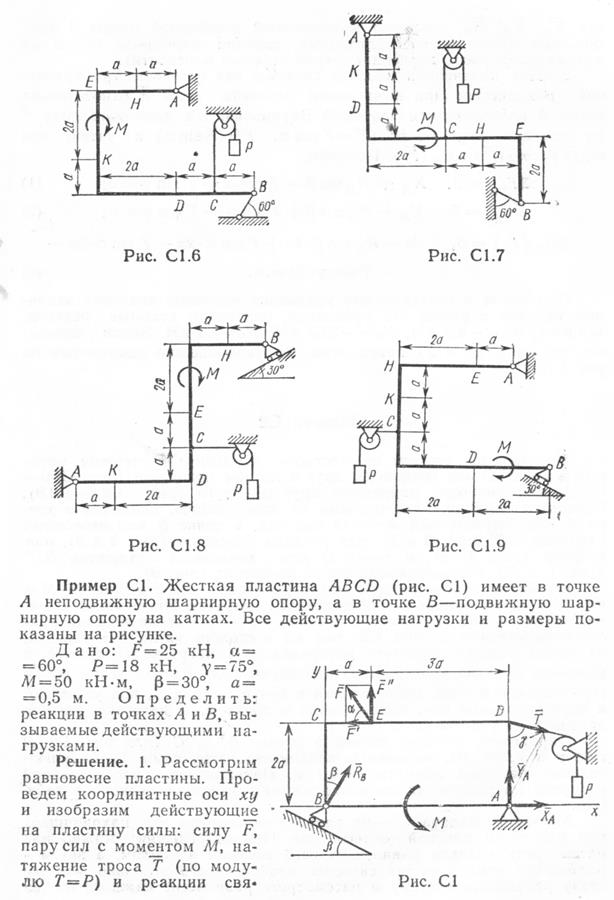

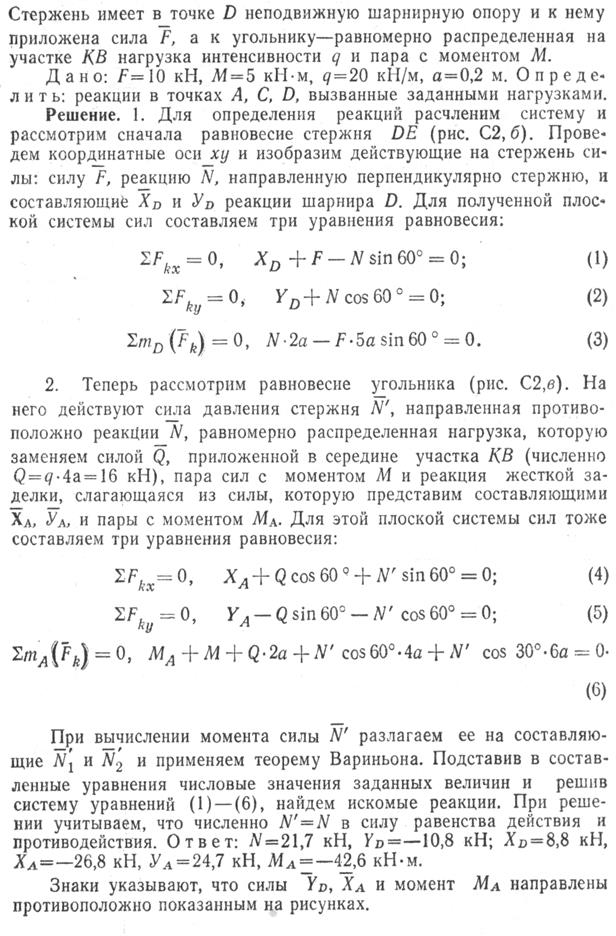
Задача С2
Конструкция состоит из жесткого угольника и стержня, которые в точке С или соединены друг с другом шарнирно или свободно опираются друг о друга. На конструкцию действует пара сил с моментом М = 60 кН м, распределенная нагрузка интенсивности q = 20 кН/м и две силы, значения которых, точки приложения и направления имеются в таблице; в этой же таблице в столбце «Участок» указано, на каком участке действует распределенная нагрузка.
Определить реакции связей в точках А,В,С (для рис. 1,2,7,9 еще и в точке D), вызванные данными нагрузками. При окончательных расчетах принять а = 0,2 м.
Указания. Задача С2 – на равновесие системы тел, находящихся под действием плоской системы сил. При ее решении следует расчленить систему и рассмотреть равновесие каждого из тел в отдельности, учтя при этом закон о равенстве действия и противодействия.



Задача К1
Механизм состоит из ступенчатых колес 1, 2, 3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступеней колес равны соответственно: у колеса 1:  , у колеса 2:
, у колеса 2:  , у колеса 3:
, у колеса 3:  На ободьях колес расположены точки А,В,С.
На ободьях колес расположены точки А,В,С.
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где  – закон вращения колеса 1,
– закон вращения колеса 1,  – закон движения рейки 4,
– закон движения рейки 4,  – закон изменения угловой скорости колеса 2,
– закон изменения угловой скорости колеса 2,  – закон изменения скорости груза 5 и т.д. (везде
– закон изменения скорости груза 5 и т.д. (везде  выражено в радианах,
выражено в радианах,  – в сантиметрах,
– в сантиметрах,  – в секундах). Положительное направление для заданных и
– в секундах). Положительное направление для заданных и  – против часовой стрелки, для заданных
– против часовой стрелки, для заданных  – вниз.
– вниз.
Определить зависимости скоростей и ускорений всех тел от скорости и ускорения тела, движение которого задано в Таблице К.1. Определить также в момент времени  = 1 с указанные в таблице в столбцах «Найти» значения скоростей и ускорений соответствующих точек или тел. Стрелкам указать на чертеже направления скоростей и ускорений всех тел, а также векторы найденных в соответствии с условием задачи скоростей и ускорений точек.
= 1 с указанные в таблице в столбцах «Найти» значения скоростей и ускорений соответствующих точек или тел. Стрелкам указать на чертеже направления скоростей и ускорений всех тел, а также векторы найденных в соответствии с условием задачи скоростей и ускорений точек.
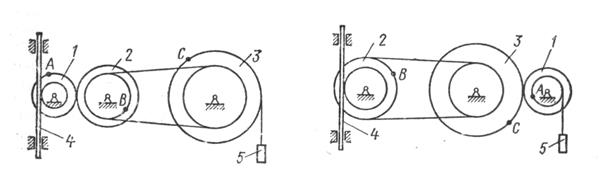
Рис. К1.0 Рис. К1.1
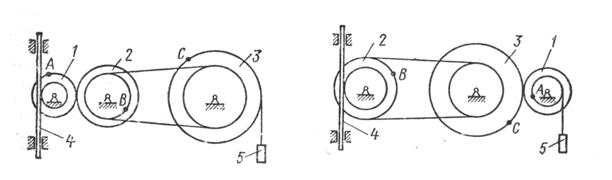
Рис. К1.2 Рис. К1.3
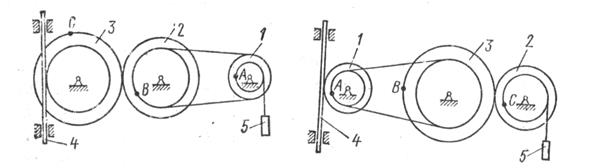
Рис. К1.4 Рис. К1.5

Рис. К1.6 Рис. К1.7
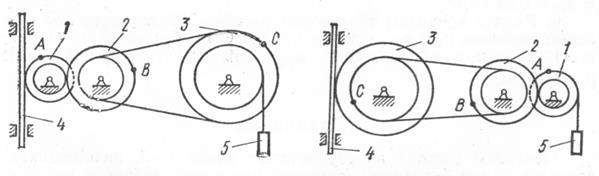
Рис. К1.8 Рис. К1.9
Таблица К1

Указания. Задача К1 – на исследование простейших движений твердого тела. При решении задачи учесть, что при зацеплении колес скорости точек зацепления одинаковы, а при ременной передаче скорости всех точек ремня и, следовательно, точек, лежащих на ободе шкивов одинаковы при отсутствии проскальзывания и растяжения ремня.

Пример К1. Связь между движениями тел в механизме осуществляется с помощью трёх передач, рисунок К1.
В реечной передаче зубья рейки 4 входят в зацепление с зубьями колеса радиуса  , установленного на валу тела 1.
, установленного на валу тела 1.

Рис. К1
Тела 1 и 2 связаны ременной передачей, радиусы шкивов  .
.
Колеса с радиусами  образуют зубчатую передачу вращательного движения между телами 2 и 3.
образуют зубчатую передачу вращательного движения между телами 2 и 3.
На вал тела 3 установлен барабан радиуса  . На барабан намотана нить с грузом 5 на конце.
. На барабан намотана нить с грузом 5 на конце.
Заданы радиусы  ,
,  ,
,  и закон изменения угла поворота тела 1:
и закон изменения угла поворота тела 1:  (φ – в радианах, t – в секундах). Положительное направление отсчета
(φ – в радианах, t – в секундах). Положительное направление отсчета  – против часовой стрелки. Определить
– против часовой стрелки. Определить  в момент времени t = 1 c.
в момент времени t = 1 c.
Решение. 1. Определим сначала алгебраические значения угловой скорости и углового ускорения ведущего звена 1:
 ,
, 
 .
.
При t =1c  ,
,  .
.
В соответствии с полученными знаками дуговую стрелку, изображающую угловую скорость тела 1, направим по часовой стрелке, а угловое ускорение – против часовой стрелки. Движение тела 1 в данный момент времени является замедленным.
Покажем также направления скоростей и ускорений остальных тел, согласовав их с направлениями стрелок  . Учитываем при этом, что в любой момент времени скорости точек
. Учитываем при этом, что в любой момент времени скорости точек  попарно равны, значит – изменяются одинаково. Тогда при заданном законе
попарно равны, значит – изменяются одинаково. Тогда при заданном законе  все тела, как и тело 1, совершают в данный момент замедленное движение, т.е. для каждого тела стрелки скорости и ускорения противоположны.
все тела, как и тело 1, совершают в данный момент замедленное движение, т.е. для каждого тела стрелки скорости и ускорения противоположны.
Модули угловой скорости и углового ускорения тела 1 в данный момент равны  ,
, 
 .
.
2. Выразим модули скоростей всех тел через модуль  .
.
Точки зацепления рейки и колеса радиуса имеют одинаковые скорости:  . Отсюда
. Отсюда
 . (1)
. (1)
Из условия, что равны скорости точек ремня  или
или  , получаем
, получаем
 . (2)
. (2)
Угловую скорость тела 3 найдём из условия равенства скоростей точек зацепления колес, радиусы которых  :
:  . Тогда
. Тогда
 . (3)
. (3)
Скорость тела 5 определим из равенства  :
:
 . (4)
. (4)
3. Ускорения тел определим из условия, что значения скоростей точек, посредством которых осуществляется передача движения от одного тела к другому, изменяются одинаково, т. е. тангенциальные ускорения этих точек в любой момент времени попарно равны.
Для точек  . Учтём, что точки тела 4 движутся прямолинейно, т.е. их нормальные ускорения равны нулю. Следовательно, их полные ускорения при поступательном движении тела имеют только равные между собой тангенциальные составляющие:
. Учтём, что точки тела 4 движутся прямолинейно, т.е. их нормальные ускорения равны нулю. Следовательно, их полные ускорения при поступательном движении тела имеют только равные между собой тангенциальные составляющие:  . Выразив тангенциальное ускорение точки
. Выразив тангенциальное ускорение точки  через модуль углового ускорения тела 1, получим
через модуль углового ускорения тела 1, получим
 . (5)
. (5)
Запишем равенство тангенциальных ускорений точек N и M  . Отсюда
. Отсюда
 . (6)
. (6)
Аналогично для точек зацепления L:  или
или
 . (8)
. (8)
Сравнивая ускорение тела 5, равное тангенциальному ускорению его точек, и тангенциальное ускорение точки D, получаем
 . (9)
. (9)
4. Определим результаты решения. По формулам (2), (4), (5), (6) подставляя модули  и
и  , сразу находим
, сразу находим
 ;
;  .
.
 ,
,  .
.
Ускорение точки С представим, как векторную сумму её нормального и тангенциального ускорений. Их модули равны


Нормальное ускорение проводим вдоль радиуса точки С к оси вращения тела 3, тангенциальное – по касательной к траектории точки (перпендикулярно радиусу), согласовав его с направлением  . Полное ускорение точки
. Полное ускорение точки

 .
.
Задача К2
Плоский механизм состоит из стержней 1,2,3,4, и ползуна В или Е. Точка D находится в середине стержня АВ. Длины стержней соответственно равны:  . Положение механизма определяется углами
. Положение механизма определяется углами  . Значения этих углов и других заданных величин указаны в таблице К2а или в таблице К2б, при этом в указанных таблицах
. Значения этих углов и других заданных величин указаны в таблице К2а или в таблице К2б, при этом в указанных таблицах  - величины постоянные.
- величины постоянные.
Определить величины, указанные в таблицах в столбцах «Найти». Причем скорости указанных точек определить двумя способами: графоаналитическим, как показано в примере, и аналитическим.
Построение чертежа начинать со стержня, направление которого определяется углом  ; ползун с направляющими для большей наглядности изобразить так, как в примере К2 (см. рис. К2б).
; ползун с направляющими для большей наглядности изобразить так, как в примере К2 (см. рис. К2б).
Заданные угловую скорость и угловое ускорение считать направленными против хода часовой стрелки, а заданные скорости  и ускорение
и ускорение  от точки В к b.
от точки В к b.
Указания. Задача К2 – на исследование плоскопараллельного движения твердого тела. При ее решении воспользоваться теоремами о скоростях и ускорениях точек плоской фигуры, а также понятием о мгновенном центре скоростей.
Таблица К2а (к рис. К2.0-К2.4)

Таблица К2б (к рис. К2.5-К2.9)


Рис. К2.0 Рис.К2.1

Рис.К2.2 Рис.К2.3

Рис.К2.4 Рис.К2.5

Рис.К2.6 Рис.К2.7
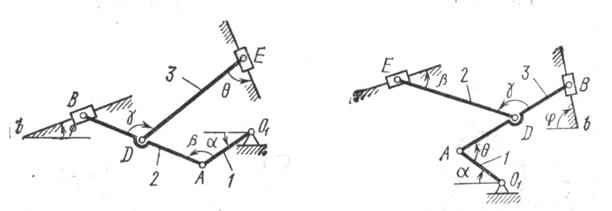
Рис.К2.8 Рис.К2.9
Пример К2. Механизм (рис.К2.а) состоит из стержней 1,2,3,4 и ползуна В, соединенных друг с другом и с неподвижными опорами  шарнирами.
шарнирами.

Задача К3
Прямоугольная пластина (рис.К3.0-К3.4) или круглая пластина радиуса R=60 см (рис.К3.5-К3.9) вращается вокруг неподвижной оси по закону  , заданному в таблице К3. Положительное направление отчета углов
, заданному в таблице К3. Положительное направление отчета углов  показано на рисунках дуговой стрелкой. На рис. 0,1,2,5,6 ось вращения перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. 3,4,7,8,9 ось вращения
показано на рисунках дуговой стрелкой. На рис. 0,1,2,5,6 ось вращения перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. 3,4,7,8,9 ось вращения  лежит в плоскости пластины (пластина вращается в пространстве).
лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой ВD (рис. 0-4) или по окружности радиуса R (рис. 5-9) движется точка М; закон ее относительного движения, т.е. зависимость  (
( выражено в сантиметрах, t – в секундах), задан в таблице отдельно для рис.0-4 и для рис.5-9; там же даны размеры b и
выражено в сантиметрах, t – в секундах), задан в таблице отдельно для рис.0-4 и для рис.5-9; там же даны размеры b и  . На рисунках точка М показана в положении, при котором
. На рисунках точка М показана в положении, при котором  (при
(при  точка М находится по другую сторону от точки А).
точка М находится по другую сторону от точки А).
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени  с.
с.
Указания. Задача К3 – на сложное движение точки. Для ее решения воспользоваться теоремами о сложении скоростей и сложении ускорений при сложном движении точки. Прежде чем проводить расчеты, следует по условию задачи определить, где находится точка М на пластине в момент времени  , и изобразить точку именно в этом положении (а не в произвольном, как показано на рисунках к задаче)
, и изобразить точку именно в этом положении (а не в произвольном, как показано на рисунках к задаче)
В случаях, относящихся к рис. 5-9, при решении задачи не подставлять числового значения R, пока не будут определены положения точки М в момент времени  и угол между радиусами СМ и СА в этот момент.
и угол между радиусами СМ и СА в этот момент.
Таблица К3


Рис. К3.0 Рис.К3.1 Рис. К3.2

Рис. К3.3 Рис.К3.4 Рис. К3.5

Рис.К3.6 Рис.К3.7
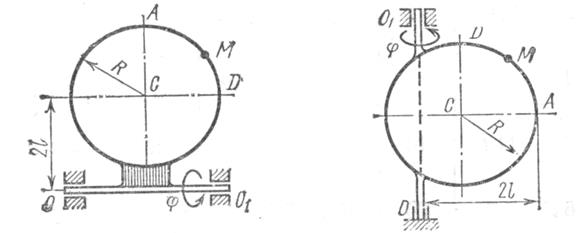
Рис.К3.8 Рис.К3.9
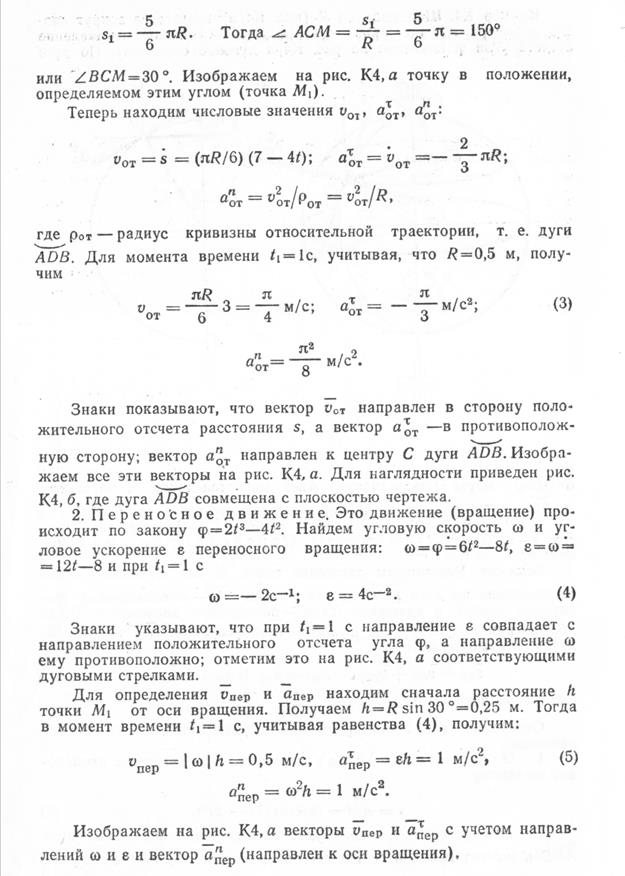
Пример К3 Шар радиуса R (рис К3.а) вращается вокруг своего диаметра АВ по закону . По дуге большого круга («меридиану») АДВ движется точка М по закону  .
.


Рис. К3