Основные понятия о механических характеристиках
Механическая характеристика отображает зависимость скорости двигателя от нагрузки.
Механическая характеристика бывает:
- естественная - она единственная - строится по паспортным данным
- искусственная - их множество, достаточно изменить один параметр. (ток, напряжение, сопротивление…)
Жесткость механической( ) характеристики определяет отклонение ее от горизонтали при номинальных параметрах.(паспортные данные двигателя (скорость, нагрузка, ток, напряжение)
) характеристики определяет отклонение ее от горизонтали при номинальных параметрах.(паспортные данные двигателя (скорость, нагрузка, ток, напряжение)
В зависимости от жесткости механические характеристики бывают:
1. Абсолютно жесткая механическая характеристика двигателя. При изменении нагрузки жесткость механической скорость остается неизменной. (Двигатель синхронный)
2. Жесткая механическая характеристика двигателя. При изменении нагрузки жесткость характеристики изменяется не значительно(скорость уменьшается незначительно).
3. Мягкая механическая характеристика двигателя.. При изменении нагрузки жесткость резко увеличивается
(скорость резко падает)
Двигатель постоянного тока
Двигатели постоянного тока(ДПТ) подразделяются по типу возбуждения бывают:
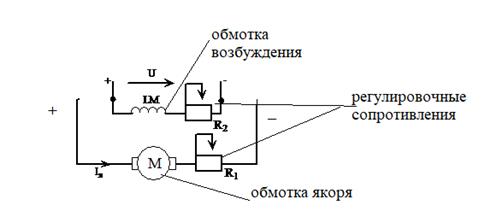
1.Двигатель постоянного тока независимого возбуждения (ДПТ НВ) - это когда обмотка якоря и обмотка возбуждения имеют независимые источники питания.
2. Двигатель постоянного тока последовательного возбужден ия (ДПТ ПВ) - это когда обмотка якоря и обмотка возбуждения между собой включены последовательно.

3. Двигатель постоянного тока смешанного возбуждения
(ДПТ СВ) - это когда обмотка якоря имеет две обмотки возбуждения, последовательного и параллельного возбуждения.

Электропривод с двигателями постоянного тока независимого возбуждения

Работа машин в двигательном режиме определяется либо механическими характеристиками, под которыми понимают зависимость: ω = f(M) и n = f(M), либо электромеханическими (скоростными), под которыми понимают зависимость ω = f (Iя) и ω = f(Iя).
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения
Механическая характеристика двигателя постоянного тока независимого возбуждения имеет вид:.

где: U- напряжение подаваемое на двигатель
М - нагрузка на валу двигателя
Rя- сопротивление обмотки якоря
R1- сопротивление добовочное
Ф - магнитный поток возбуждения
К1 К2 - конструктивные коэфициенты двигателя
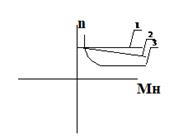
Представляет прямую, которая характеризуется 2 точками
- 1. точка идеального холостого хода - скорость двигателя без нагрузки
- 2 точка это скорость двигателя при номинальной нагрузке (по паспортным данным)
их координаты:
1. n = n0 2. n= nн
M = 0 М = Мн
где n - скорость двигателя
n0 - скорость идеального холостого хода
nн - номинальная скорость
М - момент (нагрузка на валу двигателя)
Мн - номинальный момент
 Для х.х
Для х.х

 =
= 
Тогда уравнение можно записать в форме:  ,
,
где  - скорость идеального х.х,
- скорость идеального х.х,
- перепад скоростей (жесткость)
Изменение двигательного режима работы можно осуществлять изменением 3-х параметров:
1) Изменение величины резистора в цепи якоря  ,
,  ,
,  .
.
В первом режиме механические характеристики представляют семейство прямых проходящих через точку со всевозрастающим перепадом скоростей .

Таким образом, в режиме (1) можно получать скорости вращения двигателя только вниз от номинальной.
2) Изменение напряжения, подведенного к якорной цепи двигателя  ,
,  , .
, .
В режиме (2) механические характеристики представляют семейство параллельных прямых при сохранении постоянного перепада скоростей. Жесткость характеристик при этом не изменяется. Практически в этом режиме можно получать скорости вращения ниже номинальной.
3) Изменение магнитного потока возбуждения:
Ф ≠ const (за счет изменения R2), UH = const, R1 = const.

Для режима (3) характерно изменение как точки n0, так и перепада скоростей ∆n. В этом режиме скорость вращения с ослаблением потока возбуждения увеличивается при значительном увеличении перепада скоростей.
При работе двигателя в режиме (3) на практике иногда имеет место так называемое опрокидывание регулирования. При этом при нагрузках в диапазоне больше М1 вместо теоретического увеличения скорости вращения происходит снижение скорости.

Опрокидывание регулирования имеет место при резком ослаблении потока возбуждения, когда искусственные характеристики пересекают естественную в точке до значений номинального момента. Такой режим на практике является аварийным.