Суммарная вероятная погрешность (Е) - выражает линейную радиальную СКП определения расчетного местонахождения исходного пункта аварийного происшествия с учетом:
• вероятного перемещения оставшихся в живых De;
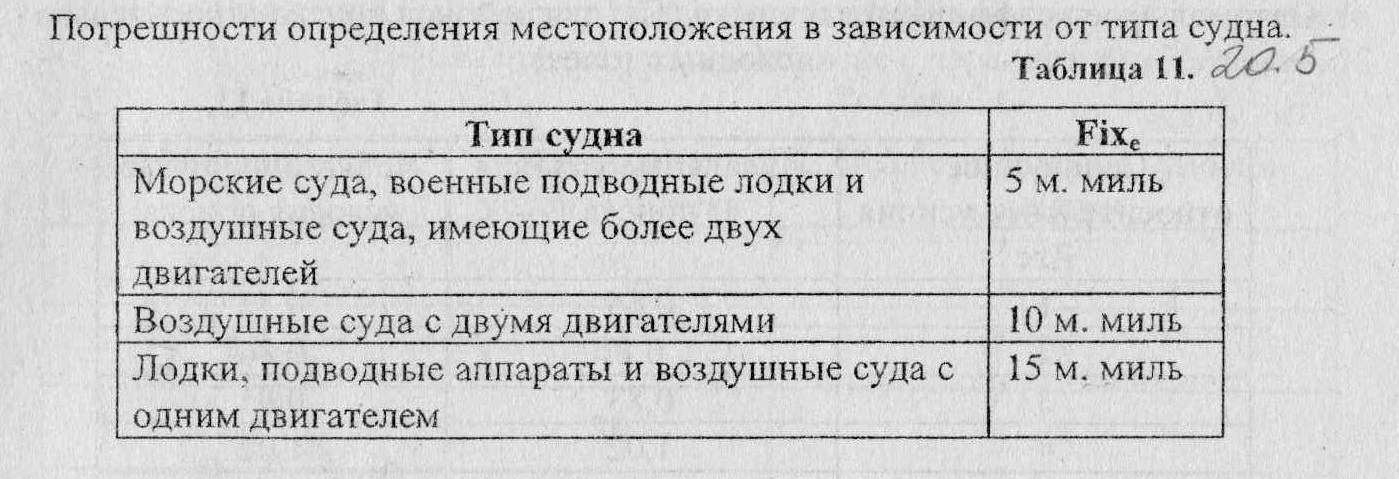
• вероятной погрешности определения места (X) потерпевшего бедствие ВС при последнем докладе экипажа о пролете точки маршрута;
• вероятной погрешности определения местоположения поисковым воздушным судном (Y).
Суммарная вероятная погрешность определения местоположения рассчитывается по формуле:

При отсутствии информации о возможном перемещении людей частная погрешность De может не учитываться.
Вероятную погрешность Y - можно определить по таблицам или другим, более точным оценкам, если таковые имеются.
Примечание. Следует иметь ввиду, что величинаY, соответствует району в форме круга (с радиусом равным Е), в котором вероятность местонахождения объекта составляет 50%.
2.Вероятность локализации (РОС - probabilityofcontainment) -соответствует вероятности нахождения объекта поиска в обозначенном (выбранном) для поиска районе или подрайоне. Возможными подрайонами обычно являются ячейки принятой координатной сетки.
Значение РОС - величина, присваиваемая данному подрайону на этапе планирования, на основании имеющейся информации о вероятном местоположении объекта поиска.
3.Вероятность обнаружения (POD - probabilityofdetection) — вероятность обнаружения объекта, поиска при условии, что он находится в районах, в которых проводился поиск. POD зависит от коэффициента охвата (С), используемых сенсоров', условий поиска и точности выполнения схемы поиска поисковым ВС. Другими словами, POD — это показатель тщательности поиска и шансов обнаружения при условии того, что объект находится в обозначенном районе.
POD определяется по таблице 14 (см. Приложения) и зависит от коэффициента охвата (С) и условий поиска.
4.Вероятность успеха (POS - probabilityofsuccess) - расчетная вероятность обнаружения объекта поиска в ходе конкретного поиска. Для каждого обследованного подрайона POS =POC x POD. POS является истинным показателем эффективности поиска. Ведь тщательный поиск в том или ином районе (POD= 100%).в котором практически отсутствуют шансы нахождения объекта поиска (РОС=0%), практически не имеет шансов на успех т.к. POS=100x0=0%.
5. Ширнна обзора (Ш) - показатель эффективности обнаружения с помощью определенного типа сенсора конкретного объекта в конкретных метеоусловиях.
Ширина обзора определяется произведением некорректированной ширины обзора Ши на поправочный коэффициент fm. Все эти значения определяются по таблицам 8,9.
Значение Ши определяем по таблице 8(значение ширины обзора для ВС с неподвижным крылом без учета метеовидимости.
Значение fm определяем по таблице 9-поправочный коэффициент с учётом метеовидимости для вертолетов и вс с неподвижным крылом.
6. Интервал между линиями пути (S) - это расстояние между двумя соседними параллельными линиями пути (ЛП) в районе (подрайоне) поиска. Для определения 8 вначале определяются не скорректированные их величины Би (см. тмбл. 7., табл. 8 Приложений) затем, путем умножения на соответствующий метеоусловиям поправочный коэффициент ( ) получают рекомендуемый интервал между линиями пути
) получают рекомендуемый интервал между линиями пути

Используя, принятые при планировании поиска, значения ширины обзора (Щ) и интервал между линиями пути (8).можно рассчитать коэффициент охвата (С) по фермуле

Или наоборот, если требуется определить оптимальный интервал между линиямм пути, при известных Ш и С, то

8. Определить СКП определением МВС при поиске объектазаданного размера.
7. Определить СКП(среднеквадратическая погрешность) поиска для заданного навигационного средства. 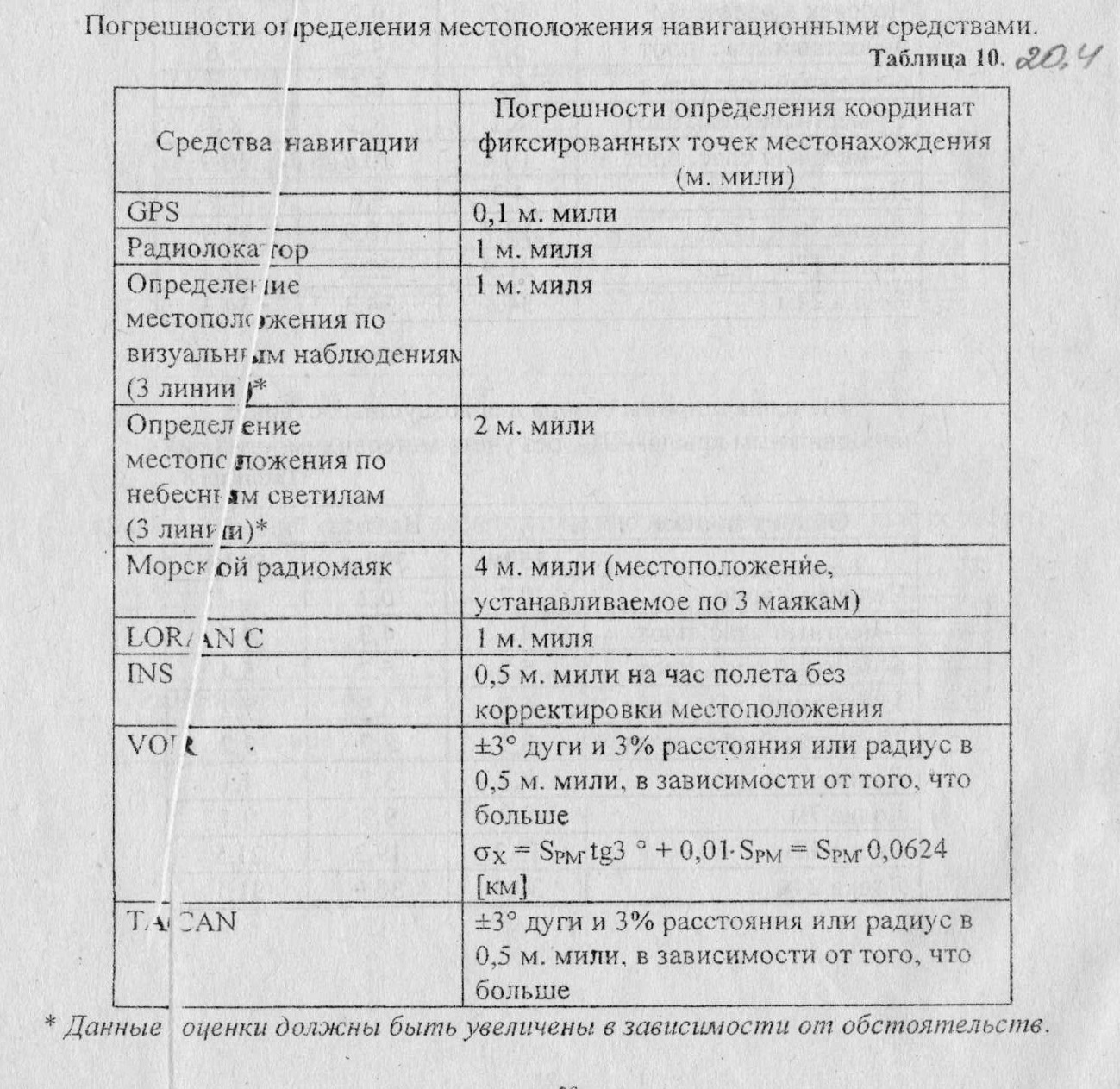
9. Алгоритм определения Rопт, Aопт. Вокруг точки вероятного местаВС,терпящего бедствия.(Расширяющийся квадрат)
Определяем сначала оптимальный радиус первого поиска: Ropt=E*fs где Е-суммарная вероятная погрешность, fs-см.табл 13.-оптимальный коэффициент поиска.
Определяем оптимальную площадь Аопт=4Rопт².
10. Суммарная продолжительность полета одним ВС определяется по формуле:
Т=Тпод1+0.30+Тм
11. Как рассчитать путевой угол и S до точки начала поиска

S=accos(sin Bб*sin Bcsp)+(cos Bб*cosBcsp)*cos (Lcsp-Lб))*111.2.
ИПУ=180±  ,если Вб>Всsp; ИПУ=360- ,если Вб<Всsp
,если Вб>Всsp; ИПУ=360- ,если Вб<Всsp
12. Как рассчитать поисковую производительность:
Z=Ш*Т*Vtas,гдеVtas-истинная воздушная скорость при выполнении ПСР; Т-возможная продолжительность поиска.