Требования высокой точности регулирования и высокого быстродействия, которые предъявляются к современному электроприводу, обуславливают применение замкнутых систем. Только замкнутые системы позволяют осуществить реализацию в электроприводе двух основных принципов:
1. Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал.
2. Регулируемая величина на выходе электропривода по возможности не должна зависеть от возмущающих воздействий на электропривод. Такими возмущающими воздействиями могут быть напряжение питания, температура, момент нагрузки, временные зависимости параметров и т. д.
Поэтому основным принципом управления является принцип обратной связи, позволяющий осуществить контроль качества регулирования по отклонению управляемого параметра от заданного. Каждый элемент функциональной схемы электропривода описывается в статике и динамике передаточной функцией.
В электроприводе в основном применяются три структуры построения:
- с промежуточным суммирующим элементом;
- с независимым регулированием параметров;
- с подчиненным регулированием.
Наибольшее применение получили два типа построения замкнутых систем регулирования:
1) с одним общим суммирующим усилителем (рис. 2.9, а);
2) с n последовательными суммирующими усилителями (рис. 2.9, б) – системы подчиненного регулирования с последовательной коррекцией.
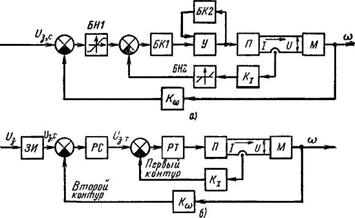
Рисунок 2.9 – Структурные схемы замкнутых систем регулирования: а) с общим суммирующим усилителем; б) с n последовательными суммирующими усилителями
Отличительной особенностью систем построенных по типу структурной схемы, приведенной на рис. 2.9, а, является наличие одного суммирующего усилителя (У), на вход которого подается алгебраическая сумма сигнала задающего и всех обратных связей жестких и гибких (суммирование может быть как электрическое, так и магнитное). Выходной сигнал усилителя, таким образом, зависит сразу от нескольких переменных, что делает практически невозможным регулирование какой-то одной переменной независимо от других.
Для разделения действия обратных связей применяют отсечки (блоки нелинейностей БН1, БН2). Но и в этом случае единственный (общий для всех обратных связей) задающий сигнал не определяет заданного значения выбранной для регулирования переменной. Придание системе требуемых динамических свойств при таком построении системы обычно достигается применением сложных корректирующих устройств, включаемых в цепь сигнала управления при малой мощности управления (блок БК1 – последовательная коррекция) или параллельно некоторым блокам системы (параллельная коррекция – гибкая отрицательная обратная связь, блок БК2). При этом нельзя осуществить независимую настройку качества регулирования всех переменных. В целом получить требуемое высокое или оптимальное качество регулирования в таких системах крайне затруднительно, а в ряде случаев и невозможно.
Но несмотря на указанные недостатки, системы, построенные по типу структурной схемы, приведенной на рис. 2.9, а, находили и еще находят широкое применение либо из-за простоты реализации при использовании громоздких электромашинных, силовых магнитных и электронно-ламповых усилителей, либо в случаях, когда не предъявляются жесткие требования к качеству переходных процессов и не требуется раздельное регулирование переменных, либо когда относительно простыми средствами удается достигнуть требуемого качества процессов.
С появлением малогабаритных и относительно дешевых полупроводниковых, в частности интегральных операционных усилителей и тиристорных преобразователей с малой мощностью управления открылась возможность строить системы подчиненного регулирования с последовательной коррекцией, в которых используется n последовательных суммирующих усилителей (рис. 2.9, б). На эти усилители возлагаются функции не только суммирования и усиления сигналов, но и выполнения некоторых других математических операций над сигналами, поэтому суммирующие усилители в этих системах называют регуляторами.
Система подчиненного регулирования (см. рис. 2.9, б) состоит из ряда контуров, число которых равно числу регулируемых переменных (или числу больших постоянных времени системы, подлежащих компенсации), причем каждый внутренний контур регулирования подчинен следующему по порядку внешнему (по отношению к внутреннему) контуру. Эта подчиненность выражается в том, что заданное значение регулируемой переменной любого внутреннего контура определяется выходным сигналом регулятора следующего по порядку контура. В результате все внутренние контуры работают как подчиненные задаче регулирования выходной координаты системы. Каждый контур строится по принципу регулирования по отклонению (по ошибке) и имеет свою обычно жесткую отрицательную обратную связь по регулируемой переменной и свой регулятор (суммирующий усилитель). Для каждого внешнего контура внутренний контур (или несколько внутренних контуров) входит в состав объекта регулирования.
Показанная на рис. 2.9, б структура системы привода постоянного тока с двигателем независимого возбуждения имеет два контура регулирования: первый (внутренний) контур – контур регулирования тока якоря двигателя, содержащий регулятор тока РТ, преобразователь П, якорную цепь двигателя и жесткую отрицательную обратную связь по току якоря с коэффициентом передачи k1; второй (контур внешний, которому подчинен первый контур) – контур регулирования угловой скорости двигателя, содержащий регулятор скорости PC, первый контур, двигатель М и жесткую отрицательную обратную связь по скорости с коэффициентом передачи kω. Задающим сигналом для второго контура является сигнал задания угловой скорости UЗ,C, а для первого — сигнал с выхода регулятора скорости UЗ,Т.
В системе подчиненного регулирования появляется возможность раздельного регулирования переменных и раздельной настройки контуров (начиная с первого, самого внутреннего контура) и коррекции переходных процессов в каждом контуре, что существенно упрощает как расчетную работу, так и техническую реализацию коррекции и практическую (в наладке) настройку системы.
2.7 Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Экспериментальный стенд имитатора ветротурбины представляет собой автоматизированный электропривод постоянного тока. Структурная схема автоматизированного электропривода постоянного тока представлена на рис. 2.10, который состоит из: трансформатора (Тр), питающегося от сети, трехфазного мостового управляемого выпрямителя (УВ), сглаживающего фильтра (Ф), электродвигателя (ЭД), датчика тока (ДТ), датчика скорости (ДС), системы управления (СУ) и нагрузкой. Нагрузкой является система электрооборудования ВЭУ (ЭО ВЭУ). УВ создает на валу ЭД механический момент подобный механическому моменту реальной ветротурбины согласно (2.9); а СУ, на основе текущего состояния системы, вычисляет момент задания Мз и осуществляет управление УВ имитатора с целью реализации этого задания.
Данная схема построена по системе подчиненного регулирования.

Рисунок 2.10 – Структурная схема автоматизированного электропривода постоянного тока имитатора ВТ
Благодаря ортогональности двух моментообразующих составляющих – тока якоря и магнитного потока, управление ДПТ однозначно и просто реализуемо: два независимых регулятора в цепи якоря и в цепи возбуждения. Наиболее эффективны для этой цепи силовые полупроводниковые преобразователи (СПП) – тиристорные выпрямители.
Именно простотой процесса управления и наличием технических средств управления (электромеханические, ионные, а затем полупроводниковые преобразователи) обусловлено преимущественное применение регулируемых электроприводов постоянного тока. При том, что ДПТ из-за наличия коллектора и щеточного узла значительно дороже и сложнее в эксплуатации, чем двигатели переменного тока.
Основной схемой преобразования в электроприводе является трехфазная мостовая (обоснование выбора такой схемы описано в разделе 3).
Преимущества УП, выполненных таким образом, – отсутствие вращающихся машин, не требуют обслуживания, имеют высокое быстродействие. Недостатки – низкий коэффициент мощности сosα ≈ cosφ, искажение напряжения питающей сети, трудно компенсируемое при значительных мощностях, необходимость в двух комплектах вентилей для работы в четырех квадрантах, необходимость в сглаживающих и уравнительных реакторах, утяжеляющих конструкцию. [9]
Система тиристорный преобразователь-двигатель (система ТП-Д) является штатным техническим решением практически везде, где используется электропривод постоянного тока. Схема электрическая принципиальная системы тиристорный преобразователь - ДПТ независимого возбуждения представлена на рис. 2.11. Для питания цепи обмотки возбуждения ДПТ применяется однофазный мостовой выпрямитель, выполненный на диодах.

Рисунок 2.11 – Схема электрическая принципиальная системы управляемый выпрямитель – двигатель постоянного тока независимого возбуждения
2.7.1 Электромагнитные процессы в СПП электропривода имитатора ветротурбины
При рассмотрении механических характеристик предполагалось, что преобразователь всегда работает в режиме непрерывного выпрямленного тока (тока якорной цепи) – диаграмма тока на рис. 2.12, а. Фактически же при малых моментах нагрузки на валу двигателя в кривой выпрямленного тока i появляются разрывы и ток становится прерывистым (рис, 2.12, в). Рисунок 2.12, б относится к граничному случаю.

Рисунок 2.12 – Диаграммы выпрямленного напряжения и тока при различных режимах: а) – непрерывный; б) – граничный; в) – прерывистый
Цепь выпрямленного тока содержит активные сопротивления Rя (якорной цепи двигателя и сглаживающего дросселя) и Rtp (трансформатора), а также соответствующие индуктивности Lя и Lтр. Пренебрежем для. простоты значениями Rтр и Lтр. Тогда кривая мгновенных значение выпрямленного напряжения Ud на выходе преобразователя будет определяться отрезками синусоид фазовых ЭДС трансформатора (рис. 2.12, а в), т. е. Ud = ed.
При указанных допущениях на участке работы одного вентиля преобразователя для цепи выпрямленного тока справедливо следующее уравнение электрического равновесия:
 (2.18)
(2.18)
где Е – ЭДС якоря, которую за время работы одного вентиля можно считать постоянной;
 – скорость изменения мгновенного значения выпрямленного тока;
– скорость изменения мгновенного значения выпрямленного тока;
 – ЭДС самоиндукции, наводимая в обмотках якоря двигателя и сглаживающего дросселя.
– ЭДС самоиндукции, наводимая в обмотках якоря двигателя и сглаживающего дросселя.
В соответствии с уравнением (2.18) на рис. 2.12, а – в построены диаграммы изменения во времени тока и напряжений силовой цепи преобразователь — двигатель.
В режиме непрерывного тока (рис. 2.12, а) после открывания очередного вентиля он воспринимает весь ток нагрузки (Iнач, поскольку ed > Е). Далее ток I возрастает до тех нор, пока ed станет больше суммы  . При этом
. При этом

А ЭДС самоиндукции направлена навстречу току и определяется согласно уравнению (2.18) как:

 (2.19)
(2.19)
По мере уменьшения разницы между ed и Е скорость возрастания тока  и ЭДС самоиндукции уменьшаются и становятся равными нулю в точке а, в которой
и ЭДС самоиндукции уменьшаются и становятся равными нулю в точке а, в которой  . Начиная с этой точки
. Начиная с этой точки  , а затем и
, а затем и  . Следовательно, после точки а ток I будет уменьшаться и
. Следовательно, после точки а ток I будет уменьшаться и  , но при этом ЭДС самоиндукции изменит свой знак и, складываясь с ed, обеспечит протекание тока в прежнем направлении, поскольку
, но при этом ЭДС самоиндукции изменит свой знак и, складываясь с ed, обеспечит протекание тока в прежнем направлении, поскольку  . При больших значениях момента нагрузки на валу двигателя, т. е. при больших средних значениях I выпрямленного тока, электромагнитной энергии, запасенной в индуктивности Lя при , оказывается достаточно для того, чтобы при отдаче этой энергии на участке
. При больших значениях момента нагрузки на валу двигателя, т. е. при больших средних значениях I выпрямленного тока, электромагнитной энергии, запасенной в индуктивности Lя при , оказывается достаточно для того, чтобы при отдаче этой энергии на участке  сохранить к концу интервала проводимости вентиля 2π/q*m значение тока i = iнач. Затем вступит в работу следующий вентиль и т. д.
сохранить к концу интервала проводимости вентиля 2π/q*m значение тока i = iнач. Затем вступит в работу следующий вентиль и т. д.
С уменьшением нагрузки двигателя угловая скорость его и ЭДС Е возрастают, а средний ток I и значение iнач уменьшаются. Наконец, при токе I = Iгр наступает такой режим, когда длительность протекания тока через вентиль по-прежнему остается равной 2π/q*m; но в начале и в конце интервала проводимости i = 0. Такой режим называется граничный (рис. 2.12, б).
В режиме непрерывного тока среднее значение выпрямленной ЭДС Еп определяется при α = const выражением:
 (2.20)
(2.20)
Дальнейшее уменьшение нагрузки на валу двигателя приводит к тому, что скорость и ЭДС Е двигателя при том же значении α еще более возрастают, а ток I становится меньше Iгр. В этом случае электромагнитной энергии, запасаемой в индуктивности Lя при , будет недостаточно для поддержания тока в течение всего интервала 2π/q*m, и ток i принимает нулевое значение раньше, чем откроется очередной вентиль (рис. 2.12, в). Ток становится прерывистым. В этом режиме в течение промежутка 2π/q*m–λ ток равен нулю. При этом напряжение на выходе преобразователя равно ЭДС двигателя Е, а вращение двигателя поддерживается за счет энергии, запасенной в движущихся массах привода.
Влияние режима прерывистого тока сводится к увеличению среднего значения выпрямленного напряжения на нагрузке по сравнению с режимом непрерывного тока. При уменьшении тока нагрузки ЭДС двигателя стремится к максимальному значению выпрямленной ЭДС edmax, которая зависит от угла регулирования α. В режиме прерывистого тока двигатель ведет себя как конденсатор, запасая энергию на участках, где протекает ток, и расходуя ее, когда ток равен нулю.
Ширина зоны прерывистых токов, т. е. значение Iгр, зависит от суммарной индуктивности цепи выпрямленного тока Lя + Lтр и угла α:
 (2.21)
(2.21)
Обычно благодаря наличию сглаживающего дросселя зона прерывистых токов, особенно для многофазных схем выпрямления, достаточно мала. В большинстве случаев значение Iгр max при α = 90o меньше, чем минимальный ток Imin эксплуатационной нагрузки двигателя.
3 РАСЧЕТ СИЛОВОГО БЛОКА ИМИТАТОРА ВТ
Необходимо спроектировать выпрямитель для обеспечения управления двигателем постоянного тока типа П42 с током не более номинального тока якоря и обеспечить длительную работу с номинальным моментом (током) при номинальной скорости вращения с постоянным потоком возбуждения. Параметры двигателя: Рн = 7400 кВт, Uян = 257 В, nн = 3000 об/мин. Допустимые пульсации тока якоря не более 7 % Idн. Обмотка возбуждения UB = 220 В. Требуется определить параметры сетевого трансформатора, параметры вентилей выпрямителей якорной цепи и обмотки возбуждения, параметры сглаживающих дросселей выпрямителей.
Проектирование нового выпрямителя содержит два качественно различных этапа.
1. Этап структурного синтеза, на котором определяется структура (принципиальная схема) выпрямителя.
2. Этап параметрического синтеза, на котором рассчитываются параметры элементов выбранной структуры (принципиальной схемы) выпрямителя. [13]
3.1 Выбор схемы выпрямителя (этап структурного синтеза)
Формальных (математических) методов синтеза структур вентильных преобразователей по требованию задания пока в силовой электронике практически нет, хотя исследования в этом направлении проводятся. Поэтому процедура синтеза схемы выпрямителя сводится к процедуре ее выбора из множества известных на основании знания их свойств. Таким образом, необходима база данных по схемам выпрямителей. В тех случаях, когда не удается выбрать подходящую схему выпрямителя из числа известных, потребуется или изобретение новой схемы, или корректировка задания на проектирование выпрямителя.
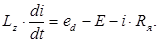
На рис. 3.1 дан пример алгоритма выбора схемы выпрямителя исходя из трех заданных параметров выхода выпрямителя (Pd0, Ud0, Id) с учетом в векторе свойств схемы только двух компонентов: использования типовой мощности трансформатора и использования вентилей по обратному напряжению.
Рисунок 3.1 – Алгоритм выбора схемы выпрямителя
В соответствии с заданием на проектирование и алгоритмом выбора схемы выпрямителя по рис. 3.1 наш выпрямитель должен быть трехфазным (Pd0 = 7400 кВт) и двухполупериодным (мостовая схема), так как требуется достаточно высокое выпрямленное напряжение. Выпрямитель обмотки возбуждения также трехфазный, но в связи с невысоким значением выпрямленного напряжения может быть выполнен по однополупериодной схеме. Поскольку коэффициенты преобразования по напряжению выбранных схем выпрямителей различаются в два раза и их требуемые выпрямленные напряжения также различаются в два раза, возможен вариант питания обеих схем от одной системы вторичных обмоток трансформатора.
3.2 Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
На рис. 3.2 представлена упрощенная схема трехфазного мостового управляемого выпрямителя для расчета параметров основных элементов.
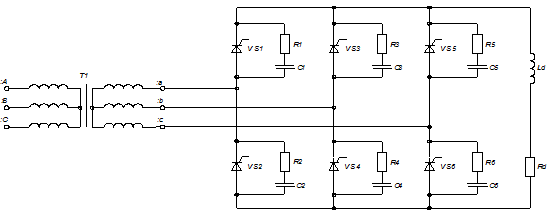
Рисунок 3.2 – Упрощенная схема трехфазного управляемого выпрямителя
Напряжение питающей сети по стандарту на качество электрической энергии может максимально отклоняться от номинала до ±10%. Поэтому необходимо обеспечить номинальное выпрямленное напряжение и при минимально возможном напряжении сети, при этом угол регулирования α в выпрямителе рационально иметь равным нулю. Тогда, учитывая, что Uя.н. = Ud0, имеем:
 (3.1)
(3.1)
полагая, что обмотки трансформатора будут соединены по схеме звезда звезда и коэффициент трансформации входного трансформатора:
 (3.2)
(3.2)
Среднее значение анодного тока вентиля:
 (3.3)
(3.3)
Действующее значение анодного тока вентиля:
 (3.4)
(3.4)
Выбираем тиристор по среднему значению анодного тока с учетом того, что здесь коэффициент амплитуды Ка=2, а рабочее обратное напряжение должно выбираться по формуле:
 (3.5)
(3.5)
где  – расчетное обратное напряжение, равное амплитуде линейной Э.Д.С. трансформатора при максимальном напряжении питающей сети;
– расчетное обратное напряжение, равное амплитуде линейной Э.Д.С. трансформатора при максимальном напряжении питающей сети;
ККП=1,4 – коэффициент, учитывающий наличие коммутационных перенапряжений;
КЗ=1,1 – коэффициент запаса;
Кр=0,8 – коэффициент рекомендуемого соотношения между рабочим и допустимым повторяющимся напряжением на вентиле.
Это тиристор Т132-50, имеющий следующие параметры: динамическое сопротивление в открытом состоянии – Rдин = 4,6 мОм, пороговое напряжение – U0 = 1,03 В, максимально допустимая температура перехода – Тjm =125 оС. [15] Действующее значение вторичного тока трансформатора:
 (3.6)
(3.6)
Действующее значение первичного тока трансформатора:
 (3.7)
(3.7)
Расчетная мощность обмоток трансформатора:
 (3.8)
(3.8)
По справочным данным выбираем трансформатор типа ТСЗ-10/0,38. который имеет следующие параметры:
- номинальная мощность S = 10 кВА;
- номинальная частота f = 50 Гц;
- потери холостого хода Рх.х. = 650 Вт;
-потери короткого замыкания Рк.з. = 250 Вт;
- ток холостого хода Iх.х. = 7,5%;
- напряжение короткого замыкания Uк.з = 3,5%.
Через эти параметры трансформатора определим нужные нам параметры элементов Т-образной схемы замещения трансформатора.
Модуль полного сопротивления короткого замыкания трансформатора:
 (3.9)
(3.9)
Активное сопротивление обмоток трансформатора, приведенное к первичной стороне:
 (3.10)
(3.10)
Реактивное сопротивление рассеивания обмоток трансформатора, приведенное к первичной стороне:
 (3.11)
(3.11)
Тогда то же сопротивление, приведенное ко вторичным обмоткам трансформатора и называемое уже анодным сопротивлением Ха, будет равно:
 (3.12)
(3.12)
 (2.13)
(2.13)