Математическая модель, описывающая поведение исследуемой механической системы, построена при следующих основных допущениях:
1) каток 4 движется без проскальзывания, т.е. модуль силы сцепления  подчинен следующему ограничению:
подчинен следующему ограничению:

где  - предельное значение силы сцепления; в нашем случае
- предельное значение силы сцепления; в нашем случае 
2) кинематические связи, наложенные систему, являются голономными (интегрируемыми), поэтому нити при движении системы всегда натянуты, т.е. реакции нитей всегда должны быть положительными.
3) колебания системы являются линейными, то есть предполагается, что удлинение пружины (перемещение центра масс катка 4) не превышает своего предельного значения: 
Анализ результатов расчета (в свете перечисленных требований к поведению механической системы) приводит к логическому выводу:
так как в некоторые моменты времени силы натяжения (реакции) нитей становятся отрицательными, а сила сцепления превышает свое предельное значение, то математическая модель системы не соответствует ее реальному поведению, — нити провисают, тела движутся рывками, а каток – с проскальзыванием.
Данное заключение позволяет сформулировать задачу исследования:
обеспечить соответствие математической модели реальному поведению системы.
Иными словами, необходимо удовлетворить следующим условиям:
1) нити должны быть натянутыми при движении системы;
2) величина силы сцепления должна обеспечивать движение катка без проскальзывания;
3) перемещение центра масс катка не должно превышать величины предельного значения удлинения пружины.
Данные условия представим в математическом виде

 (25)
(25)
Для определения значений внутренних параметров механической системы - масс тел  и коэффициента жесткости пружины c, - обеспечивающих ее функционирование в соответствие с предложенной математической моделью, выберем в качестве анализируемых величин
и коэффициента жесткости пружины c, - обеспечивающих ее функционирование в соответствие с предложенной математической моделью, выберем в качестве анализируемых величин
1) реакции сил натяжения нитей;
2) силу сцепления катка с опорной плоскостью;
3) перемещения центра масс катка 4;
Исследуем изменение этих функций, в зависимости от масс тел входящих в механическую систему, а также жесткости упругого элемента.
Ограничимся состоянием установившегося движения. В этом случае закон движения груза, его скорость и ускорение имеют вид

Функции сил натяжений нитей и сцепления катка представим в виде:
 (26)
(26)
где коэффициенты, входящие в (26) равны:

















Условия (25), обеспечивающие адекватность движения системы математической модели (11), (12) можно теперь представить в виде

Так как все коэффициенты, входящие в соотношения (27) являются
функциями внутренних параметров механической системы  и с, то
и с, то
вычисление зависимостей  представим в виде процедуры S(M1,M3,M4,W) пакета Mathcad. Выражение для функции ΔS(M1,M3,M4,W), в силу несложности ее преобразования, получим позже.
представим в виде процедуры S(M1,M3,M4,W) пакета Mathcad. Выражение для функции ΔS(M1,M3,M4,W), в силу несложности ее преобразования, получим позже.
В дальнейшем, ограничимся исследованием влияния масс  и
и  . Установим интервалы их изменения. Для этого рассмотрим механическую систему в состоянии резонанса. Если
. Установим интервалы их изменения. Для этого рассмотрим механическую систему в состоянии резонанса. Если  , то
, то

|
откуда следует: 1) если  , то
, то  ; 2) если
; 2) если  , то
, то  . Процедура вычислений функций, входящих в (27):
. Процедура вычислений функций, входящих в (27):

Рассмотрим теперь последнее неравенство в условиях (27) – Δ S > 0. Учитывая выражение для амплитуды  представим его в виде
представим его в виде

где  - предельное значение перемещения груза 1.
- предельное значение перемещения груза 1.
Подставляя вместо коэффициентов kи nих выражения, найдем, из уравнения Δ S = 0, предельные значения массы груза 1

где 
Исследуем теперь зависимости (27). Для этого изобразим их на плоскости  линиями уровня. Отдельно для каждой функции линии уровня будут иметь вид:
линиями уровня. Отдельно для каждой функции линии уровня будут иметь вид:
Для  :
:

Для  :
:

Для  :
:

Для  :
:

Чтобы определить области допустимых значений для масс груза 1 и катка 4, нарисуем линии уровней всех функций на одном рисунке:
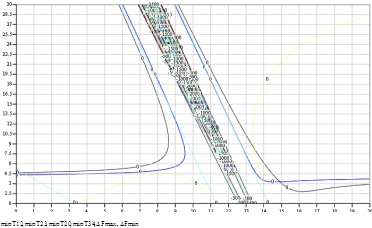
Как видно из рисунка, в дорезонансном режиме нет области значений масс, которые удовлетворяли бы условиям (25).
Результаты анализа
С целью подтверждения проведенных исследований произведем расчет механической системы в послерезонансном режиме:






























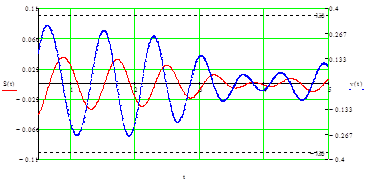
Графики движения и скорости груза 1
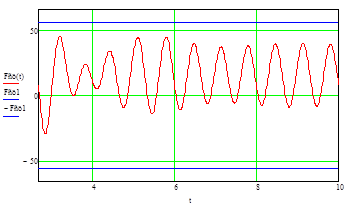
Графики сил натяжения нитей:

График силы сцепления:
Графики реакций опор блока 3:

Выводы
В результате решения дифференциального уравнения движения системы (11) при начальных условиях (12) определен закон движения системы S=S(t), на основании которого по разработанному алгоритму вычислены значения реакций связей.
Анализ результатов расчета показал, что в некоторые моменты времени натяжения нитей становятся отрицательными, а сила сцепления превышает свое предельное значение, и, следовательно, принятая математическая модель не соответствует поведению механической системы: нити провисают, тела движутся рывками, а каток 4 – с проскальзыванием.
Для устранения этой ситуации были сформулированы критерии, удовлетворение которых обеспечивает адекватность движения системы математической модели, т.е. выполнение условий (25).
Исследование влияний масс груза 1 и катка 4 на движение системы позволило определить область значений масс для них, внутри которой выполняются указанные условия.
Исследования показали, что такая область существует лишь в послерезонансном режиме.
Результаты расчетов скорректированной механической системы представлены в виде графиков изменения характерных параметров в зависимости от времени.
Область допустимых значений для масс груза и катка представлена ниже:
