1.1 Общая характеристика проблемы и существующие подходы к ее решению
Беспилотный летательный аппарат (БПЛА) - это разновидность летательного аппарата, управление которым осуществляется при отсутствии пилота на его борту. Чаще всего под БПЛА понимают дистанционно управляемый (пилотируемый) летательный аппарат способный совершать полет и в автоматическом режиме. БПЛА является частью комплекса, в который входит наземный пункт управления с его центральным звеном -человеком-оператором.
Размеры и масса БПЛА, относящихся к БАС различных категорий, различаются на порядки. Значительный интерес представляют БПЛА категорий Nano, Micro, Mini с взлетной массой от десятка грамм до килограммов, которые можно определить как малоразмерные БПЛА (МЛА). Их количество приближается к 40% от общего количества БПЛА всех категорий.
Незначительная масса накладывает ряд ограничений на конструкцию как собственно МЛА, так и его систем управления, силовой установки, полезной нагрузки и энергоисточников, однако и дает возможность использования нестандартных аэродинамических схем. Примером такой аэродинамической схемы может служить махолет, по принципу полета напоминающий стрекозу.
Масса целевой нагрузки составляет обычно (10-30)% от взлетной массы БПЛА. Поэтому масса целевой нагрузки МЛА категории Nano весьма незначительна. Целевой (полезной) нагрузкой МЛА категории Nano могут быть, например, сенсоры различного назначения: газовые, радиационные, инфракрасные и т.д. [15].
Облик БПЛА определяется аэродинамической схемой и внутренней компоновкой двигателя, органов управления, оборудования и увязкой этих агрегатов с элементами конструкции планера БПЛА.
Аэродинамическая схема БПЛА характеризуется способом создания управляющих сил и управляющих моментов, а также взаимным расположением устройств, создающих эти силы и моменты. Схема обеспечивает возможность управления полетом, что необходимо для выполнения целевой задачи. Распространенной аэродинамической схемой БПЛА является «летающее крыло», или иначе — «бесхвостка» [4].
Распространенной аэродинамической схемой МЛА является самолетная схема с хвостовым оперением. Тяга двигателя может создаваться как тянущим так и толкающим винтом. Подобные способы создания тяги используются и на МЛА типа «летающее крыло»[5].
Самый маленький БПЛА из серии WASP (масса 0,2 кг, размах крыла 32 см) оснащен электромотором, получающим энергию от аккумуляторов и подзаряжающимся во время полета от солнечных батарей. Уменьшения размеров конструкторы добились использованием многофункциональных компонентов, например, встроенными в крыло батареями. Предназначен для наблюдения, целеуказания, корректировки огня, оценки ущерба над вражеской территорией. Модификация WASP II несет цветные видеокамеры, направленные вперед и в стороны, плюс дополнительную модульную нагрузку оптических или инфракрасных сенсоров.
Компания Aero Vironment поставляла малоразмерные БПЛА WASP Raven и Puma вооруженным силам США, Италии, Дании, Испании и Нидерландов. По состоянию на 2008 год было выпущено несколько тысяч аппаратов данного типа
Посадка БПЛА также возможна «по-самолетному», с применением парашюта, с применением сети, применяется также посадка «на брюхо». Возможна посадка с применением нестандартных технологий, например, перевод БПЛА в плоский штопор и приземление на надувную емкость.
В задачи, решаемые БПЛА в военных целях, также входят:
1) ведение разведывательных полетов общего характера в горах или над водой: разведка и обнаружение на территории противника малоразмерных целей, определение дислокации войсковых соединений и оказание помощи командирам в руководстве боевыми действиями; выполнение полетов над позициями своих войск для получения информации об их дислокации (в труднодоступных районах);
2) разведка и наблюдение за полем боя и корректировка артиллерийского огня:
3) лазерное целеуказание местоположения цели;
4)ведение радиоэлектронной борьбы (электронная разведка, радиотехническая разведка, разведка средств связи, радиоэлектронное противодействие, подавление радиоэлектронных средств);
5) обеспечение радиорелейной связи;
6) участие в учебных операциях в качестве воздушной мишени:
7) охрана важных объектов;
1.2 Выбор объекта управления
Беспилотный летательный аппарат представляет собой летательный аппарат тяжелее воздуха, нормальной аэродинамической схемы, интегральной компоновки (его крыло плавно сопрягается с фюзеляжем), моноплан, с аэродинамическим принципом полёта. Предназначен для целенаправленного управляемого движения в атмосфере на различных, в том числе малых, высотах полета на базе аэродинамического принципа полета и создание использованием аэродинамического момента управления.
Для управления по углу крена используются элероны, для управления по углу тангажа – рули высоты, для управления по углу рысканья – вертикальное двухкилевое оперение.
Конструктивно-компоновочная схема БПЛА представлена на рис. 1.1
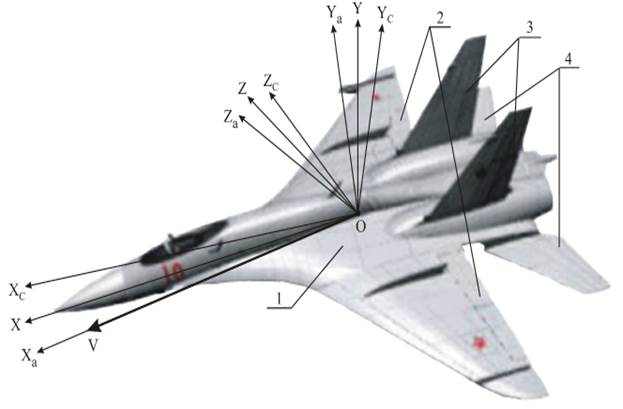
Рисунок 1.1 – Конструктивно-компоновочная схема БПЛА
Как видно из приведенной схемы, основными органами управления являются рули направления (3), элероны (2) и рули высоты (4), которые на самом деле представляют собой дифференциально отклоняющиеся стабилизаторы. Датчики и САУ расположены в специальном отсеке, который также обозначен на рисунке 1.1. В хвостовой части находится капсула с посадочным парашютом (на схеме не обозначена).
В консолях крыла расположены тяги управления закрылками, в консолях киля – рулями направления, а вдоль корпуса – рулями высоты [3].
1.3 История развития БПЛА
В 1898 году Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно[36].
В 1910 году, вдохновлённый успехами братьев Райт, молодой американский военный инженер из Огайо Чарльз Кеттеринг предложил использовать летательные аппараты без человека. По его замыслу управляемое часовым механизмом устройство в заданном месте должно было сбрасывать крылья и падать, как бомба, на врага. Получив финансирование армии США, он построил и с переменным успехом испытал несколько устройств, получивших названия The Kattering Aerial Torpedo, Kettering Bug (или просто Bug), но в боевых действиях они так и не применялись.
В 1933 году в Великобритании разработан первый БПЛА многократного использования Queen Bee. Были использованы три отреставрированных биплана Fairy Queen, дистанционно управляемые с судна по радио. Два из них потерпели аварию, а третий совершил успешный полёт, сделав Великобританию первой страной, извлёкшей пользу из БПЛА. Эта радиоуправляемая беспилотная мишень под названием DH82A Tiger Moth использовалась на королевском Военно-морском флоте с 1934 по 1943 г. Армия и ВМФ США с 1940 года использовали ДПЛА Radioplane OQ-2 в качестве самолёта-мишени.
На несколько десятков лет опередили своё время исследования немецких учёных, давших миру на протяжении 40-х годов реактивный двигатель и крылатую ракету (крылатая ракета «Фау-1» была первым применявшимся в реальных боевых действиях беспилотным летательным аппаратом).
В течение второй мировой войны немецкие учёные вели разработки нескольких радиоуправляемых типов оружия, включая управляемые бомбы Henschel Hs 293 и Fritz X (англ. Fritz X), ракету Enzian (англ. Enzian) и радиоуправляемый самолёт, наполненный взрывчатым веществом. Несмотря на незавершённость проектов, Fritz X и Hs 293 использовались на Средиземном море против бронированных военных кораблей. Менее сложным и созданным скорее с политическими, чем с военными целями был самолёт V1 Buzz Bomb с реактивным пульсирующим двигателем, который мог запускаться как с земли, так и с воздуха.
В СССР в 1930—1940 гг. авиаконструктором Никитиным разрабатывался торпедоносец-планер специального назначения (ПСН-1 и ПСН-2) типа «летающее крыло» в двух вариантах: пилотируемый тренировочно-пристрелочный и беспилотный с полной автоматикой. К началу 1940 г. был представлен проект беспилотной летающей торпеды с дальностью полёта от 100 км и выше (при скорости полёта 700 км/ч). Однако этим разработкам не было суждено воплотиться в реальные конструкции.
В 1941 году были удачные применения тяжёлых бомбардировщиков ТБ-3 в качестве БПЛА для уничтожения мостов.
Во время Второй мировой войны ВМС США для нанесения ударов по базам германских подводных лодок пытались использовать дистанционно-пилотируемые системы палубного базирования на базе самолёта B-17. После Второй мировой войны в США продолжились разработки некоторых видов БПЛА, и уже во время войны в Корее для уничтожения мостов успешно применялась радиоуправляемая бомба Tarzon.
В 1942 году запущено производство крылатых ракет Фау-2, имеющих систему управления, удерживающую ракету на заданных при старте курсе и высоте в течение всего полета.
23 сентября 1957 года КБ Туполева получил госзаказ на разработку мобильной ядерной сверхзвуковой крылатой ракеты среднего радиуса действия. Первый взлёт модели Ту-121 был осуществлён 25 августа 1960 года, но программа была закрыта в пользу баллистических ракет КБ Королёва. Созданная же конструкция нашла применение в качестве мишени, а также при создании беспилотных самолётов разведчиков Ту-123 «Ястреб», Ту-143 «Рейс» и Ту-141 «Стриж», стоявших на вооружении ВВС СССР с 1964 по 1979 год. Ту-143 «Рейс» на протяжении 70-х годов поставлялся в африканские и ближневосточные страны, в том числе и в Ирак. Ту-141 «Стриж» состоит на вооружении ВВС Украины и поныне. Комплексы «Рейс» с БРЛА Ту-143 эксплуатируются до настоящего времени, поставлялись в Чехословакию (1984), Румынию, Ирак и Сирию (1982), использовались в боевых действиях во время Ливанской войны. В Чехословакии в 1984 г. были сформированы две эскадрильи, одна из которых в настоящее время находится в Чехии, другая — в Словакии.[2]
В начале 1960-х годов дистанционно-пилотируемые летательные аппараты использовались США для слежения за размещениями ракет в Советском Союзе и на Кубе.
После того, как были сбиты RB-47 и два U-2, для выполнения разведывательных работ была начата разработка высотного беспилотного разведчика Red Wadon (модель 136). БПЛА имел высоко расположенные крылья и малую радиолокационную и инфракрасную заметность.
Во время войны во Вьетнаме, с ростом потерь американской авиации от ракет вьетнамских ЗРК, возросло использование БПЛА. В основном они использовались для ведения фоторазведки, иногда для целей РЭБ. В частности, для ведения радиотехнической разведки применялись БПЛА 147E. Несмотря на то, что, в конечном счёте, беспилотник был сбит, он передавал на наземный пункт характеристики советского ЗРК С-75 в течение всего своего полёта, и ценность этой информации была соизмерима с полной стоимостью программы разработки беспилотного летательного аппарата. Она также позволила сохранить жизнь многим американским лётчикам, а также самолёты в течение последующих 15 лет, вплоть до 1973 г.
В ходе войны американские БПЛА совершили почти 3500 полётов, причём потери составили около четырёх процентов. Аппараты применялись для ведения фоторазведки, ретрансляции сигнала, разведки радиоэлектронных средств, РЭБ и в качестве ложных целей для усложнения воздушной обстановки. Но полная программа БПЛА была окутана тайной настолько, что её успех, который должен был стимулировать развитие БПЛА после конца военных действий, в значительной степени остался незамеченным.
Беспилотные летательные аппараты применялись Израилем во время арабо-израильского конфликта в 1973 г. Они использовались для наблюдений и разведки, а также в качестве ложных целей. В 1982 г. БПЛА использовались во время боевых действий в долине Бекаа в Ливане. Израильский БПЛА AI Scout и малоразмерные дистанционно-пилотируемые летательные аппараты Mastiff провели разведку и наблюдение сирийских аэродромов, позиций ЗРК и передвижений войск. По информации, получаемой с помощью БПЛА, отвлекающая группа израильской авиации перед ударом главных сил вызвала включение радиолокационных станций сирийских ЗРК, по которым был нанесён удар с помощью самонаводящихся противорадиолокационных ракет, а те средства, которые не были уничтожены, были подавлены помехами. Успех израильской авиации был впечатляющим — Сирия потеряла 18 батарей ЗРК[36].
1.4 Актуальность проблемы
Беспилотные летательные аппараты (БПЛА) и их комплексы на сегодняшний день являются наиболее перспективными, динамично развивающимися, уникальными системами военного и гражданского назначения. Прослеживается тенденция наращивания усилий ряда научно и технически развитых стран по разработке БПЛА и их комплексов, прежде всего малоразмерных. Анализ существующих и перспективных БПЛА показывает, что в настоящее время определились предпочтительные схемы и компоновки для каждого класса аппаратов, рациональность которых подтверждена опытом разработчиков различных стран. На сегодня большинство построенных, строящихся и находящихся в эксплуатации БПЛА — это крылатые аппараты самолетных схем.
Качественное решение целевой задачи БПЛА зависит от бесперебойной работы всех бортовых систем, однако особая роль отводится навигационно-пилотажным системам БПЛА, так как автономность, независимость от человеческого фактора, устойчивость к внешним воздействиям являются решающими факторами успешности выполнения миссий БПЛА.
Навигационно-пилотажные системы современных беспилотных летательных аппаратов разнообразны по своей архитектуре в зависимости от типа летательного аппарата, его массы, аэродинамической схемы, стоимости и требований, предъявляемых к точности, качеству управления, устойчивости, автономности. Решаемые ими задачи можно разделить на две подзадачи: подзадача навигации, которая заключается в определении координат летательного аппарата в пространстве, и подзадача пилотирования, которая заключается в управлении летательным аппаратом по навигационным параметрам. Известны универсальные решения первой подзадачи, в то же время оптимальное решение второй подзадачи в значительной степени зависит от класса летательного аппарата, его компоновки, аэродинамической схемы и др. особенностей. В этой связи исследования в области структурно-параметрического синтеза оптимальной пилотажной системы для крылатого малоразмерного беспилотного летательного аппарата самолетной схемы среднего радиуса действия со стартовой массой до 100 кг являются актуальными[33].
2 Выбор режима и движения
2.1 Коротко периодического движения БПЛА в обоих каналах с постоянной высотой.

В канале бокового движения

где


















 .
.

 ;
;

Передаточные функции объекта управления








В канале бокового движения:
 .
.

Передаточные функции объекта управления:















2.2 Формирование функциональной схемы системы. Определение передаточных функций отдельных элементов, разомкнутой и замкнутой системы по задающему и возмущающему воздействиям.
Функциональная схема – это графическое представление системы управления с изображением всех функциональных блоков, линий связей между ними и сигналов [2].
Функциональная схема системы управления самолета представлена на рис. 2.1.

|
 (t),(t),
(t),(t), 

Рисунок 2.1  Функциональная схема системы управления БПЛА
Функциональная схема системы управления БПЛА
На рисунке 2.1 приняты следующие обозначения:

 бортовая цифровой вычислительная машина;
бортовая цифровой вычислительная машина;
 – предварительный усилитель;
– предварительный усилитель;
 – сервопривод;
– сервопривод;
 – объект управления;
– объект управления;
 – датчик угла;
– датчик угла;
 – датчик угловой скорости;
– датчик угловой скорости;
 – нормирующие усилители;
– нормирующие усилители;
 – требуемое значение угла тангажа;
– требуемое значение угла тангажа;
 – сигнал на выходе задающего устройства;
– сигнал на выходе задающего устройства;
 – сигнал на выходе предварительного усилителя;
– сигнал на выходе предварительного усилителя;
 – сигнал на выходе СУ, управляющее воздействие на СП;
– сигнал на выходе СУ, управляющее воздействие на СП;
 – угол отклонения руля высоты;
– угол отклонения руля высоты;
 – возмущающее воздействие при продольном движении БПЛА;
– возмущающее воздействие при продольном движении БПЛА;
 – полученное значение угла тангажа;
– полученное значение угла тангажа;
 – угловая скорость тангажа;
– угловая скорость тангажа;
 – напряжение на выходе датчика угла;
– напряжение на выходе датчика угла;
 – напряжение на выходе датчика угловой скорости;
– напряжение на выходе датчика угловой скорости;
 – напряжение на выходе нормирующего усилителя НУ2.
– напряжение на выходе нормирующего усилителя НУ2.
 – напряжение на выходе нормирующего усилителя НУ1.
– напряжение на выходе нормирующего усилителя НУ1.
Для обеспечения устойчивости, самолет охвачен двухканальной отрицательной обратной связью. В каналах обратной связи установлены ДУ и ДУС. Датчики угла и угловой скорости преобразуют полученные углы тангажа и угловые скорости в соответствующие напряжения ,  . Далее эти сигналы пропускают через нормирующие усилители НУ1 и НУ2 соответственно, чтобы усилить сигнал и предотвратить перерегулирование. После нормирующих усилителей сигналы подаются в СУ.
. Далее эти сигналы пропускают через нормирующие усилители НУ1 и НУ2 соответственно, чтобы усилить сигнал и предотвратить перерегулирование. После нормирующих усилителей сигналы подаются в СУ.
Заключение
В ходе выполнения домашнего задания был выбран объект управления – беспилотный летательный аппарат. Было приведено вербальное описание объекта управления, выбран режим движения – кратко периодическое с постоянной высотой. Был произведён анализ литературы написанной на эту тему, так же был выполнен патентный поиск, патенты и найденные литературные источники приведены в списке использованных источников. Результатом выполнения домашнего задания было разработка функциональной схемы системы автоматического управления беспилотным летательным аппаратом.
Список используемых источников
1. КуликА.С. Расчет и проектирование элементов систем управления. - учебное пособие. Харьков, ХАИ, 1986.
2. Кулик А.С.Конспект лекций по курсу «Теория автоматического управления», 2004 -2005.
3. Симонов В.Ф. Конспект лекций по курсу «Цифровые системы автоматического управления», 2006 -2006.
4. БоднерВ.А.. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 504 с.
5. БоднерВ.А., КозловМ.С. Стабилизация летательных аппаратов и автопилоты.- М.: Оборонгиз, 1961. - 573 с.
6. Пилотируемые и беспилотные ЛА как объекты управления / ГординА. Г. - Учеб.пособие. - Харьков: Харьк. авиац. ин-т, 1990. - 100 с.
7. БесекерскийВ.А., Попов Е. П. Теория систем автоматического регулирования. - М.: Наука, 1975 - 768 с.
8. БесекерскийВ.А., ВласовВ. Ф., Гомзин В. М. и др. Руководство по проектированию систем автоматического управления. - М.: Машиностроение, 1985 - 576 с.
9. Шаталов А.С., Топчев Ю.И., Кондратьев В.С. Летательные аппараты как объекты управления. - М.: Машиностроение, 1972 - 640 с.
10. Динамика полета и конструкция летательных аппаратов. Часть 1 / ГординА. Г.. - Учеб.пособие. - Харьков: Харьк. авиац. ин-т, 1983. - 138 с.
11. Беспилотные летательные аппараты как объекты управления / ГординА. Г.. - Учеб.пособие. - Харьков: Гос.аэрокосм.ун-т «Харьк. авиац. ин-т», 2000. - 140 с.
12. Динамика полета и конструкция летательных аппаратов 1/ГординА. Г. - Учеб.пособие. - Харьков: Харьк. авиац. ин-т, 1987. - 99 с.
13. Построение диагностических моделей при разработке диагностируемого обеспечения динамических систем / Кулик А.С., Сироджа И.Б., Шевченко А.М., - Харьков: Ипмаш АН УССР, 1989. - 56с.
14. ГаничП. С. Расчет и проектирование элементов систем управления. - X.: ХАИ, 1988.-96 с.
15. Основы проектирования летательных аппаратов (транспортные системы). В.П. Мишин, В.К. Безвербый, Б.М. Панкратов.- Учебник для технических вузов.- М.: Машиностроение, 1985. - 360 с.
16. Проектирование самолетов.. БадягинА.А,. ЕгерС.М,. МишинВ.Ф, СклянскийФ.И., ФоминН.А.. М.: Машиностроение, 1972. - 516 с.
17. Проектирование самолетов. ЕгерС.М., МишинВ.Ф., ЛисейцевН.К.. М.: Машиностроение, 1983.-616с.
18. Патент Украина В64G1/24 №39261.Летательный аппарат с системой автоматического управления по высоте.-2001.
19. Патент Украина В64С13/00 №62989.Система автоматического управления.- 2004.
20. Патент Украина В64С13/00 №63736.Система автоматического управления.- 2004.
21. Патент РФ В64С13/18 №2031812.Индикатор высоты самолета.-1995.
22. Патент СССР В64С13/18 №1825746.Система управления боковым движением беспилотного малоразмерного летательного аппарата.-1993.
23. Патент СССР В64Э5/00 №1821428.Система управления полетом дистанционно пилотируемого летательного аппарата и устройство дляего осу ществления. -1993.
24. Патент СССР В64С13/18 №687732.Система траекторного управления летательным аппаратом.-1986.
25. Патент ВС В64С13/18 №46356.Система автоматического управления и стабилизирования беспилотного летательного аппарата.-1978.
26. Патент ВО В64С13/18, С01С23/00 №46357.Система автоматического управления беспилотным летательным аппаратом.-1980.
27. Патент ВС В64С25/68 №46358.Система управления беспилотным летательным аппаратом.-1980.
28. «Разработка и оформление конструкторской документации радиоэлектронной аппаратуры: справочник». / Э.Г. Романычева и др. - М.: Радио и связь, 1989.
29.«Технология сборки и испытаний авиационных приборов»: КоваленкоП.И., КорицкийИ.Г, ЮрьеваВ.Г. - Харьков:Харьк.авиац. ин-т., 1988.-93 с.
30. Заболотный В.А. «Проектирование технологических процессов сборки электронных устройств приборов и систем управления летательных аппаратов. - Учеб.пособие по курсовому проектированию». - Харьков: Харьк. авиац. ин-т., 1997 -43 с.
31. Комплект документов «Типовой технологический процесс. Изготовление субблоков и узлов на печатных платах».
32. Терещук Р.М. и др. «Полупроводниковые приёмно-усилительные устройства: Справ. Радиолюбителя» / Р.М. Терещук, К.М. Терещук, С.А.Седов. - 3-е изд., перераб. и доп. - Киев: Наук, думка, 1987. - 800с.: ил.
33. КрасовскийА.А. Системы автоматического управления полетом и их аналитическое конструирование.М: Машиностроение, 1973. - 558 с.
34. МихалевИ.А,Окоемов Б.Н., ЧикулаевМ.С. Системы автоматического управления самолетом. М: Машиностроение, 1987. - 240 с.
35. Компьютерный анализ и проектирование систем управления. Част 2/ Соколoв Ю.Н.. Учеб.пособие. - Харьков: Гос.аэрокосм.ун-т «Харьк. авиац. ин-т», 2005. - 184 с
36. Википедия свободная энциклопедия [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/БПЛА