Раздел 3. РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОПРИВОДА
Вопросы:
1. Регулирование скорости электропривода изменением параметров двигателя.
Для обеспечения рационального хода технологических процессов обеспечили наиболее эффективное использование производственных механизмов и оптимизировали режимы их работы, уменьшили потребление электрической энергии, применением регулирования скорости движения механизмов.
Для регулирования скорости движения рабочего органа существуют две возможности:
1. Изменение угловой скорости двигателя.
2. Изменение передаточного числа механических передач, установленных между двигателем и механизмом.
При регулировании скорости механическим способом отсутствует плавность регулирования, да и техническая реализация регулирования относительно сложна и не надежна. В настоящее время в подавляющем большинстве случаев регулирование скорости рабочего органа производится путем изменения скорости электродвигателей, работающих в регулируемом электроприводе.
Под регулированием скорости электродвигателя понимаем – целенаправленное ее изменение независимо от момента на валу двигателя в соответствии с требованиями, которые предъявляются к закону движения рабочего органа механизма. Иными словами, это принудительное управление системой скорости, исходя их требований технологического процесса при подаче управляющего сигнала на вход системы.
Под регулируемым электроприводом понимаем – электропривод, обеспечивающий плавное с необходимой точностью регулирование координат скорости и момента в заданном диапазоне.
В естественной схеме включения двигатель не может обеспечить регулирования параметров движения. Поэтому для создания регулируемого электропривода необходим преобразователь электрической энергии. Регулируемые параметры преобразования энергии (напряжение, частота, форма тока, напряжения) удается получить для привода с заданными статическими и динамическими характеристиками. Применение регулируемого электропривода в составе технологических машин и агрегатах связано с одним из следующих обстоятельств:
1. Необходимо оперативное управление ходом технологического процесса (электроприводов кранов, прокатных станов).
2. Необходимо установить и точно выдерживать технологический режим (непрерывные прокатные станы, бумагоделательные машины).
3. Необходимость корректировки технологического процесса (питатели, дозаторы).
4. Автоматическое управление режимом обработки материала (станки с ЧПУ).
5. Необходимо оптимизировать технологический процесс по затратам электрической энергии (электропривода насосов, компрессоров, вентиляторов).
Основные понятия о регулировании скорости
Многие производственные механизмы требуют в процессе работы изменения скорости в тех или иных пределах.
Регулировать скорость движения рабочего органа производственного механизма можно двумя способами:
1. Изменением угловой скорости двигателя.
2. Изменением передаточного отношения механических передач, устанавливаемых между двигателем и рабочим органом.
Второй способ требует установки коробки передач, механических вариаторов и других устройств. При этом, как правило, не удаётся получить плавного регулирования скорости. По этой причине стремятся осуществить регулирование скорости основного источника механической энергии - электродвигателя.
Регулированием скорости называют изменение скорости электропривода путём искусственного воздействия на его электромеханические параметры.
Понятие, регулирование скорости, не следует путать с изменением скорости, которое вызывается ростом или снижением нагрузки и происходит в соответствии со свойствами механической характеристики двигателя.
Способы регулирования и управления электроприводом подразделяются на параметрический и автоматический.
Под параметрическим способом понимается изменение напряжения, тока, частоты или другого параметра, от которого зависит вид механической характеристики двигателя. Этот способ широко используется в разомкнутых системах электропривода, где изменение регулируемого параметра осуществляется вручную.
При автоматическом способе изменение параметра осуществляется в зависимости от регулируемой величины (скорости, тока, напряжения и т.п.) с помощью предусмотренной для этой цели обратной связи.
Показатели регулирования скорости
Скорость двигателя, как правило, можно регулировать изменением нескольких параметров, дающих технический и экономический эффект. Сопоставление способов регулирования производят по следующим показателям:
1. Диапазон регулирования скорости — это отношение максимальной угловой скорости к минимальной.
D = wmax / wmin
Обычно диапазон регулирования выражается в числах в виде отношения, например: 2:1, 4:1, 20:1 и т.д.
2. Плавность регулирования характеризует скачёк скорости при переходе от одной ступени регулирования к другой ближайшей возможной.
jпл = wi / wi-1,
где wi и wi-1 угловые скорости i-й и (i - 1) ступеней регулирования соответственно.
При плавном регулировании jпл ® 1 а число ступеней Z ® ¥. В случае же ступенчатого регулирования коэффициент плавности может существенно отличаться от единицы.
3. Экономичность регулирования характеризует затраты на сооружение и эксплуатацию электропривода. Существенное значение имеют потери энергии при регулировании. Коэффициент полезного действия при регулировании
h = Р2 / (P2+ DP)
При работе двигателя на разных скоростях следует подсчитывать так называемый средневзвешенный КПД за регулировочный цикл, состоящий из m - ступеней.
hср =  P2i × ti / (P2i + DPi) ti
P2i × ti / (P2i + DPi) ti
Здесь P2i и DPi полезная мощность и потери на i-й ступени регулирования, ti - время, в течении которого двигатель работает на i-й ступени.
Важным экономическим показателем являются коэффициент мощности и потребление энергии за рабочий цикл.
cos j = Pa / ÖPa2 + Pp2
При работе на разных ступенях регулирования определяют средневзвешенный коэффициент мощности:
cos jср = Pai × ti / ÖPai2 + Ppi2× ti
4. Стабильность угловой скорости при изменении нагрузки характеризует способность привода сохранять её постоянной при заданном изменении нагрузки. Стабильность определяется жесткостью механической характеристики. Ниже для иллюстрации представлены две механические характеристики, обладающие разной жёсткостью, при изменении нагрузочного момента в пределах ± DМ. Они характеризуются разным отключением угловой скорости Dw. Напомним, что жесткостью называют отношение.
Рисунок 1
5. Направление регулирования скорости, то есть уменьшение или увеличение её по отношению к номинальной скорости, зависит от способа регулирования.
6. Допустимая нагрузка двигателя, то есть наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя, для разных способов регулирования будет различной.
Допустимая нагрузка двигателя ограничивается степенью его нагрева, которая зависит от потерь энергии в двигателе. Потери энергии определяются током, протекающим через двигатель.
Отсюда следует вывод, что условием полного использования двигателя на разных регулировочных характеристиках является постоянство нагрузочного тока. Если ток двигателя будет равен номинальному, то двигатель будет загружен полностью. Следовательно, допустимой нагрузкой двигателя можно считать такую нагрузку, при которой ток двигателя будет равен номинальному. Конечно, при этом полагают, что условия охлаждения двигателя на всех ступенях регулирования, при больших и малых скоростях остаются неизменными.
При регулировании следует иметь ввиду, что изменение момента и мощности на валу двигателя в зависимости от угловой скорости имеет разный характер для разных производственных механизмов.
В случае если момент нагрузки на всём диапазоне регулирования остаётся постоянным (например, у кранов, подъёмных машин и т.п.), то мощность на валу пропорциональна скорости. Такое регулирование называют регулированием при постоянном моменте.
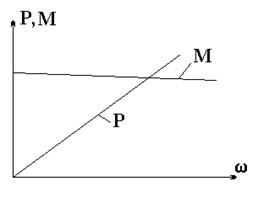
Рисунок 2
Если же на всём диапазоне регулирования остаётся неизменным ток и мощность, то такое регулирование называют при постоянной мощности. В этом случае значение момента обратно пропорционально скорости:
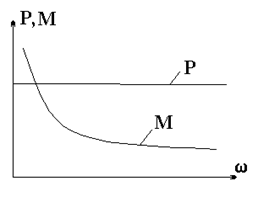
Рисунок 3
Для примера, рассмотрим двигатель постоянного тока. У него можно получить две зоны регулирования. Если регулирование скорости происходит путём изменения напряжения подводимого к двигателю или изменением сопротивления якорной цепи, то при неизменном магнитном потоке и токе якоря момент будет постоянным
М = кФI
Мощность же при этом изменяется по линейному закону, так как она пропорциональна угловой скорости
Р = М × w
Регулирование при постоянном моменте соответствует первой зоне регулирования. Во второй зоне регулирование производится изменением магнитного потока возбуждения так, чтобы осталась неизменной мощность. В этом случае при номинальном токе якоря магнитный поток необходимо изменять по закону гиперболы, чтобы получить регулирование при постоянной мощности.
Из выражения
w = (Uн Iн ×Rн)/ кФ
найдём магнитный поток
Ф = (Uн Iн×Rн) / кw
Это выражение Ф = f(w) представляет собой гиперболу. Ниже на рисунке приведены зависимости мощности и момента от скорости при двух зонном регулировании.
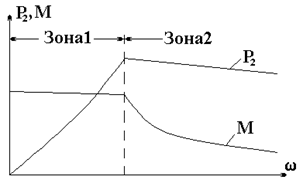
Рисунок 4