Разработав чертежи, мы стали искать, что нам нужно для создания своего робота. В интернете, во время поиска информации и комплектующих, мы наткнулись на несколько механических и электрических моделей аэраторов. Мы узнали о материалах, из которых они изготовлены, какая электроника и источники питания в них используются. Рассмотрев все конструкции данного типа, мы решили, что для создания корпуса возможно использовать ПВХ трубку диаметром 50мм.
1. Труба стекловолокно (20 мм). Для нашего прототипа эта труба служила основной осью.
2. ПВХ труба (50 мм). В нашем проекте с помощью этой детали мы сделали каркас.
3. Подшипники (54 – 18). Подшипники служили:
Во – первых в нашем случае они помогали лучше закрепить ось в каркасе.
Во – вторых
4. Муфта ПВХ (56мм). Эта муфта помогла лучше закрепить подшипник в каркасе.
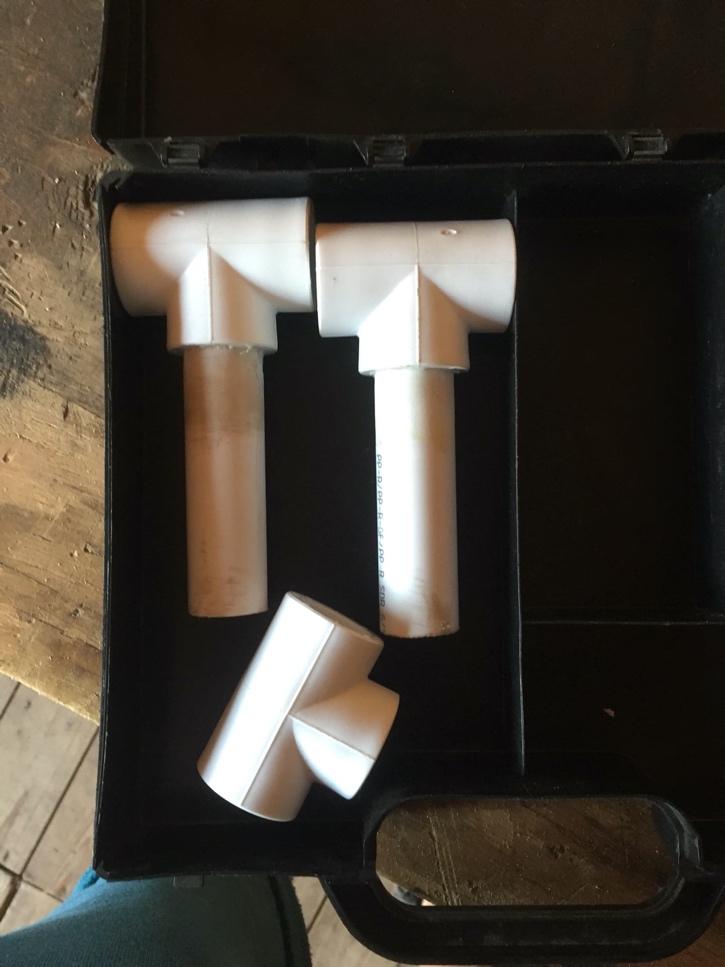
5. ПВХ переходники (тройники). С помощью этих деталей мы смогли сделать верхнюю часть аэратора.
6. Подставки жёсткости (угол наклона 90*). В данном случае при использовании подставок жёсткости мы смогли лучше закрепить и укрепить все детали конструкции.
7. Баллон пластиковый (Вместимость 5л). Данный баллон мы использовали как лопасти на верхнюю часть.
8. Пищевой контейнер (Вместимость 0,8мл). Контейнер послужил отличной защитой электроники от воды.
9. Краска (В баллонах). Краска полностью поменяла цвет нашего робота.
10. Изолента (1 моток). С помощью изоленты я лучше закрепил всю конструкцию.
11. Саморезы. Понадобились для большего закреплени деталей на конструкции.
12. Клей строительный. Клей пригодился для склеивания пластика.
Для сборки нашего робота мы закупили детали, представленные в таблице 1.
| Наименование | Количество | Цена |
| Пищевой контейнер | 1 шт. | 120 руб. |
| Подшипник | 2 шт. | 320 руб. |
| Муфта ПВХ | 1 шт. | 36 руб. |
| Тройник ПВХ | 3 шт. | 39 руб. |
| Труба стекловолокно | 2 м. | 116 руб. |
| Труба ПВХ | 1 м. | 84 руб. |
| Подставки жесткости | 20 шт. | 50 руб. |
| Краска | 4 баллона | 624 руб. |
| Баллон пластиковый | 1 шт. | 153, 90 руб. |
| Саморезы | 50 шт. | 102 руб. |
| Изолента | 1 шт. | 48 руб. |
| Клей строительный | 1 упаковка | 143, 50 руб. |
| Итого: 1836, 4 руб. |
Сборка робота
Чтобы собрать каркас нашего робота, мы использовали ПВХ трубы. Предварительно разметив трубу, мы разрезали ее на несколько частей и спаяли их между собой с использованием уголков и тройников для труб. Блок для подключения элементов питания мы разместили на основной платформе с помощью специальных креплений, распечатанных на 3D принтере.
Для закрепления элементов электроники и из источников питания я использовал пищевой контейнер. После установки элементов микрокомпьютера, закрепили датчики.
Поэтапная сборка прототипа:
1. Разметить заготовки по заданным меркам в чертеже.
2. Распилить и зачистить заготовки.
3. Вставить подшипники в основные части (основная ось, каркас).

4. Сборка основных частей робота (поддерживающие буйки, верхняя часть, основная платформа).

а) Сборка крепежа для крепления поддерживающих буйков к основанию;
б) Верхняя часть подвижного вала в разборке;

б) Верхняя часть подвижного вала в сборке;

в) Сборка лопастей для верхней части подвижного вала;

г) Подготовка и конструирование основы на которой будет крепиться каркас с валом внутри, электроника и элементы плавучести.
5. Покраска основных частей (поддерживающие буйки, верхняя часть, основная платформа, основная ось, каркас).

а) Покраска поддерживающих буйков;

б) Покраска верхней части;

в) Покраска лопастей для верхней части;

г) Покраска основной оси и каркаса.
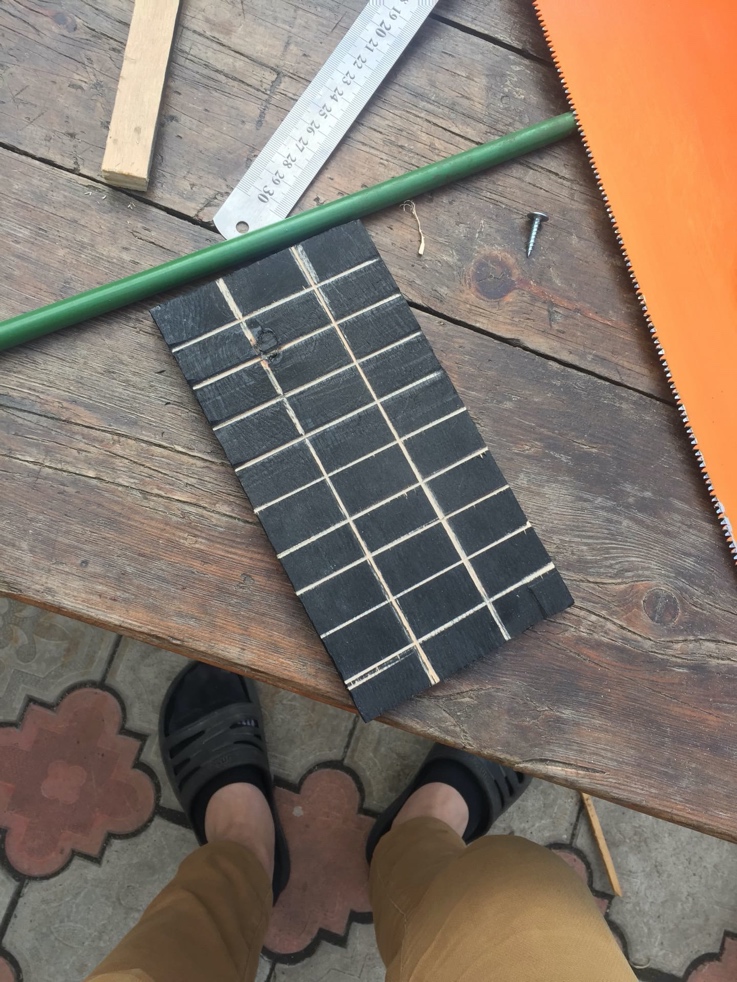
6. Сборка и покраска макета солнечных батарей.
7. Сборка электроники.

8. Сборка подставок для электроники.

а) Сборка подставок для датчиков;

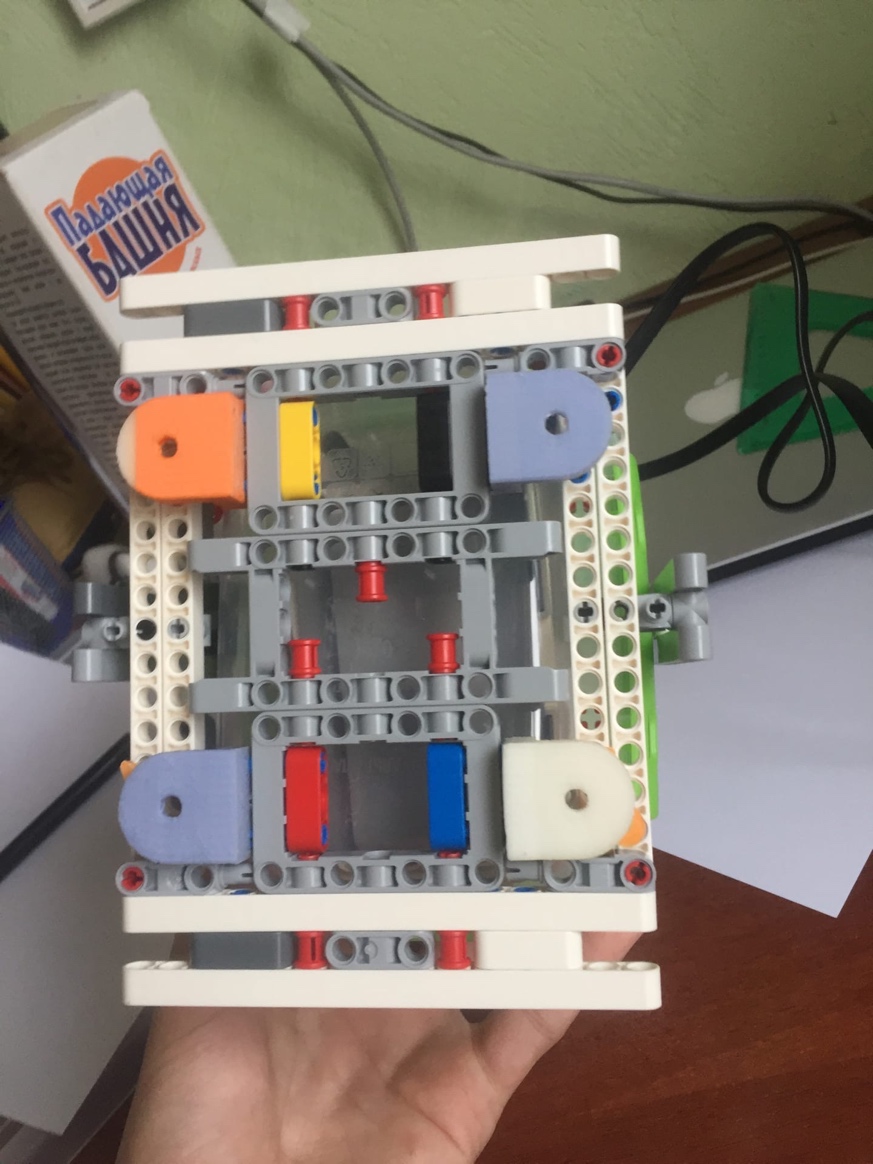
б) Сборка подставки для микрокомпьютера;
8. Финальный этап сборки прототипа.


а) Сборка между этапами;

б) Финальный вид.
Кинематическая схема
| Основная платформа. |
| Верхняя часть подвижного вала. |
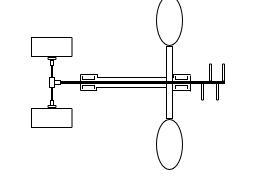
| Поддерживающие буйки. |
| Каркас конструкции. |
| Основная ось. |
| Радиально – упорные односторонние подшипники скольжения. |
| Нижняя часть подвижного вала(пропеллер). |
Программирование
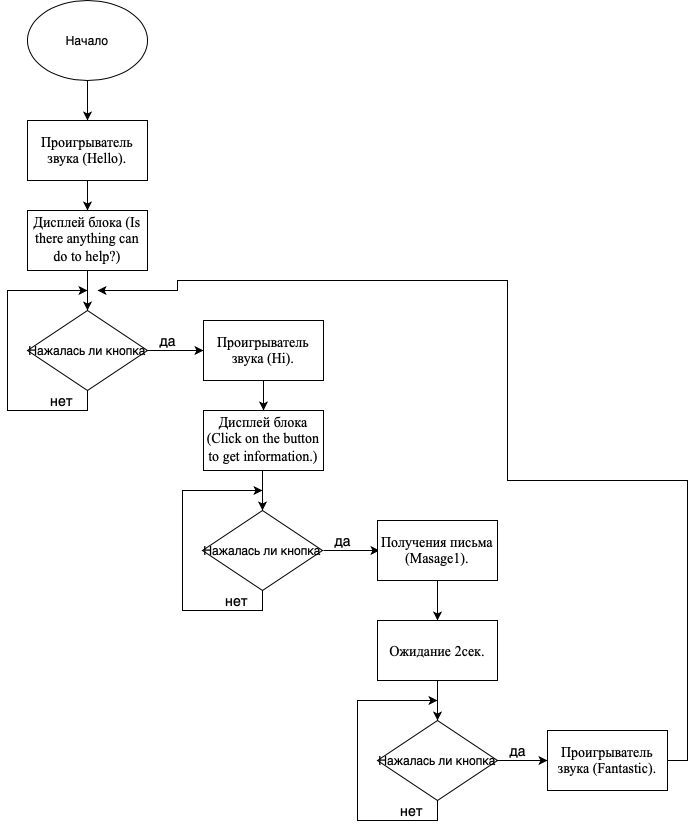
Словесное описание алгоритма:
В нашем проекте в роли электронике выступали датчики и блоки EV3. В программировании микрокомпьютера EV3 результат должен был быть таким. У меня в проекте участвует два блока EV3, с помощью одного из них мы собираем информацию с датчиков температуры и датчика света и передавать информацию другому блоку, связанным между собой по сети Bluetooth или Wi – Fi. С помощью другого блока я должен забирать и выводить информацию в виде таблиц и измерительных данных. После проведённой мною операций я обязан составить документацию в которой расписаны помесяцевые исследования и графики о улучшениях или ухудшениях природных показателей с/п «Берёзка». В дальнейшем наши данные, полученные с помощью нашей установки можно будет передавать проекту «Живи озёра».
Блок схема:
%3CmxGraphModel%3E%3Croot%3E%3CmxCell%20id%3D%220%22%2F%3E%3CmxCell%20id%3D%221%22%20parent%3D%220%22%2F%3E%3CmxCell%20id%3D%222%22%20style%3D%22edgeStyle%3DorthogonalEdgeStyle%3Brounded%3D0%3BorthogonalLoop%3D1%3BjettySize%3Dauto%3Bhtml%3D1%3BexitX%3D0.5%3BexitY%3D1%3BexitDx%3D0%3BexitDy%3D0%3BentryX%3D0.5%3BentryY%3D0%3BentryDx%3D0%3BentryDy%3D0%3B%22%20edge%
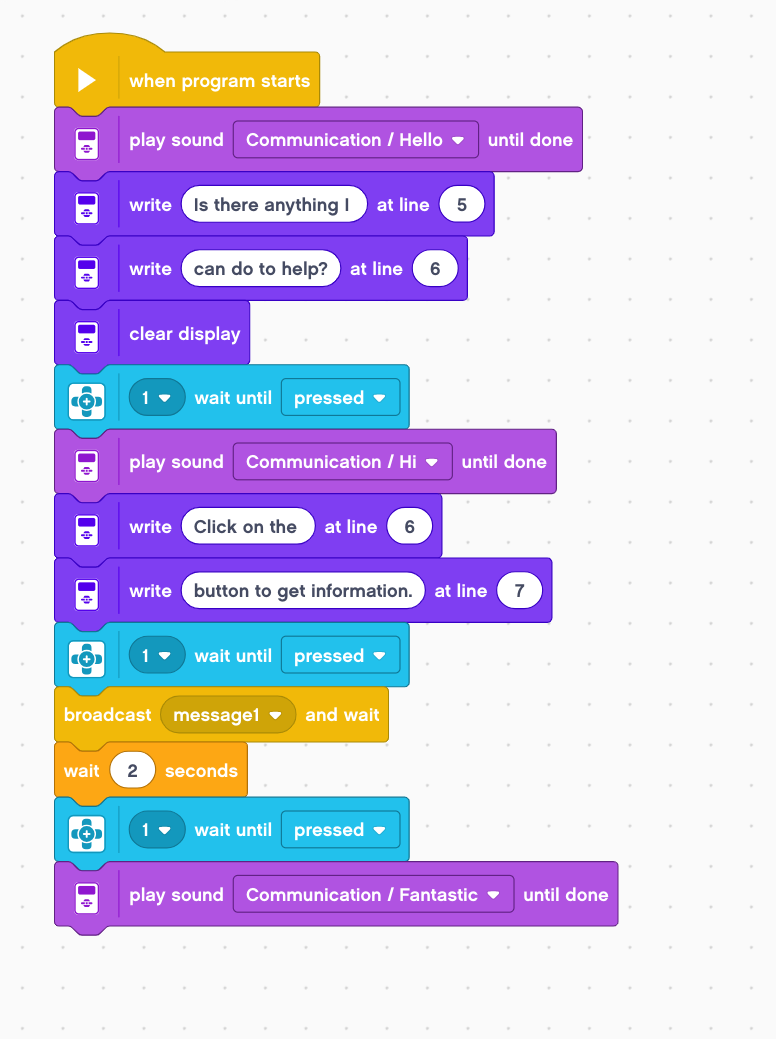
Код программы:
| Блоки этого цвета отвечают за начало программы. |
| Блоки этого цвета отвечают за отправку «письма». |
| Блоки этого цвета отвечают за звуки, издаваемые блоком. |
| Блоки этого цвета отвечают за циклическую часть программы и за ожидание. |
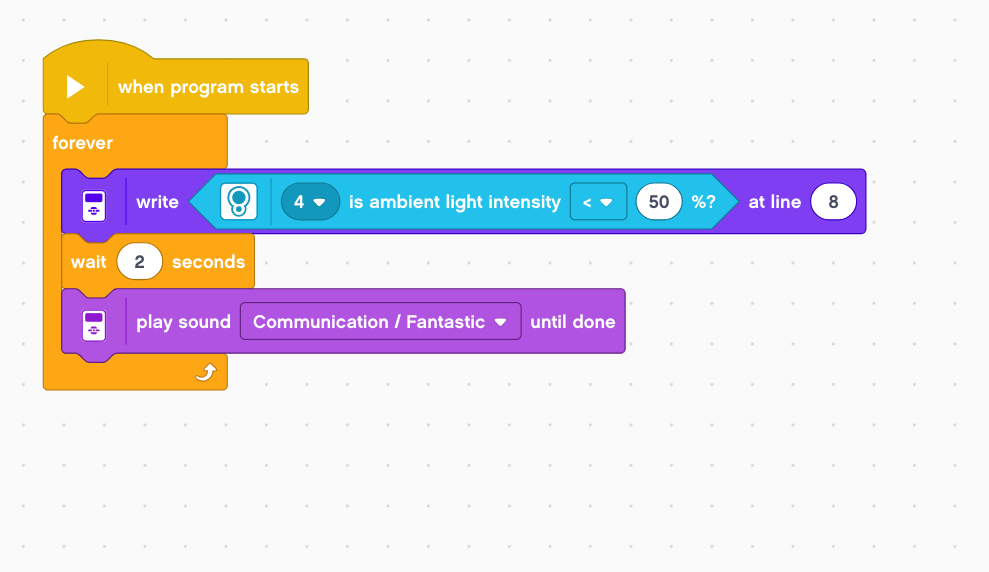
| Блоки этого цвета отвечают за время ожидания. |
| Блоки этого цвета отвечают за вывод информации, изображённую на дисплеях блоков. |
| Блоки этого цвета отвечают за начало программы и получения «письма». |
| Блоки этого цвета отвечают за датчик касания. |
| Блоки этого цвета отвечают за звуки, издаваемые блоком управления. |
Тестирование робота
После того, как мы собрали систему и запрограммировали её, мы провели серию тестов.
В результате которых, мы определили, что эта модель достаточно устойчива, но необходимы доработки над системой прокрутки винта, плавучестью и рассмотрение возможности установки редуктора, для увеличения оборотов винта погруженного в воду.
Затем мы сделали некоторые измерения. Вес конструкции 4,7 кг. На данном этапе наш робот умеет, стоять на воде, а также определять мутность воды и температуру воды.
Для стабильной работы системы будет разработан якорь, усовершенствована система вращения и плавучести. Т.к. для прототипа мы использовали электронику конструктора Ев3, необходимо изучить и определить какой контроллер, датчики и источник питания необходимо устанавливать в действующей модели.
Вывод
В процессе работы над волновой системой аэрации воды, на основе изученных нами статей, просмотренных видео, а также связи с авторами проекта "Живи озеро", мы сконструировали свою систему аэрации воды, на базе труб ПВХ, стальных подшипников, пластиковых ёмкостей для жидкости и электроники Lego Mindstorm Ev3. Разработав чертежи и сконструировав прототип, мы провели испытания и провели устойчивость установки на озере. По нашему мнению, созданный нами прототип может использоваться в прикладных задачах: в наблюдении за биологическим состоянием озера и в аэрации воды. Данная система может быть установлена в любой водоём с стоячей водой для его аэрации и сбора данных.