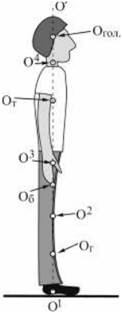
Рефлекторные движения человека следуют законам динамики даже во сне. Особенно наглядно это иллюстрирует подъём из постели или со стула из положения «сидя». Биомеханика этого процесса весьма сложна, поэтому ограничимся только его схематическим представлением (рис. 1.47). Рассмотрим только как иллюстрацию роли моментов сил тяжести, возникающих при вставании со стула. Примем во внимание 4 условные оси вращения, соответственно расположенные: в голеностопном суставе О1 (она неподвижна в этом приближении; в коленном О2, тазобедренном О3 и шейном О4 суставах. Примем также, что тело перемещается только в плоскости рисунка. Выделим четыре основных элемента массы с условными центрами инерции (массы): голень (Ог), бедро (Об), туловище (От, принимаем, что руки неподвижны относительно туловища) и голову (Огол.). Идеальным для положения тела, как совокупности механических частей, является расположение на стуле с прямоугольной геометрией (рис. 1.47а) и положением «стоя» (рис. 1.47в), (в этом случае центры масс находятся на одной вертикали, проходя через точку опоры О1). В обоих положениях моменты сил тяжести фрагментов тела уравновешены.
 |
 |
 |
а б в
Рис. 1.47. Схематическое представление перехода из положения
«сидя» в положение «стоя».
а – Механическая модель устойчивого равновесия в положении «сидя»; б и в – положение тела в промежуточном состоянии
Но человек не механическое устройство, и оба положения не физиологичны: для удержания тела в этих положениях необходимо усилия всего мышечного корсета человека.. Формулируем вопрос в таком виде: как из положения «сидя» занять положение «стоя». Инструкций и рекомендаций в Интернете можно найти множество (к сожалению, без графики), но все они сводятся к следующему. Человек несколько смещается вперёд по сидению стула, далее наклоняет вперед туловище и голову, уменьшая плечи: головы – l г, туловища – l т, бёдер – l б (для голени не приведено – вклад моментов сил тяжести здесь наименьший), сил тяжести, действующих на фрагменты тела. Далее бедра усилием мышц отрывают от стула, постепенно туловище приподнимают и распрямляют. На всем пути минимизируются мышечные усилия по преодолению моментов сил тяжести фрагментов тела.
Главным производителем механической энергии человека являются скелетные мышцы и мышечные группы, а источником энергии – биохимические процессы в организме. Работа любой мышцы опорно- двигательного аппарата человека основана на способности мышцы к сокращению. В момент мышечного сокращения сама мышца укорачивается, а обе точки крепления к костям сближаются одна относительно другой. При этом подвижная точка (insertion – место прикрепления мышцы) начинает приближаться к начальной неподвижной точке мышцы крепления (origin). Это сопровождается относительным перемещением частей тела, т.е. затрачивается энергия и совершается работа.
Таким образом, прилагая разную степень мышечного усилия, становится возможным выполнение определенной механической работы (подъем тяжести, перемещение конечности тела с грузом и т.п.). С точки зрения механики мышечная сила, в данном случае, будет определяться площадью сечения мышечных волокон. Размер мышечного сокращения определен длиной мышечного волокна. Соединения костей и взаимодействие с мышечными группами устроено в форме механического рычага, позволяющего выполнять простейшую работу по поднятию и передвижению предметов.
Из повседневной практики нам известно, что чем дальше от упора (оси вращения) приложена сила, т.е. чем больше рычаг, тем с меньшими усилиями можно выполнить работу. Так и в биомеханике – чем дальше от опорной точки крепится мышца, тем более эффективно будет использована ее сила. П.Ф. Лесгафт (П.Ф. Лесгафт (20.09.1837 – 22.11.1909) – биолог, анатом, антрополог, врач, педагог. Больше известен как создатель теоретической функциональной анатомии и научной системы физического воспитания. Прогрессивный общественный деятель. В 1869-1871гг. работал экстраординарным профессором Казанского императорского университета.) квалифицировал мышцы на сильные, имеющие крепление дальше от опорной точки, и быстрые или ловкие, имеющие точку крепления вблизи опоры.
Мышечное движение всегда производится одновременно в двух взаимно противоположных относительно оси вращения направлениях. По этой причине для движения вокруг одной опорной точки необходимо наличие двух мышц на противоположных от нее сторонах. Направления движения в биомеханике имеют свои определения: сгибание и разгибание, приведение и отведение, горизонтальное приведение и горизонтальное отведение, ротация медиальная и ротация латеральная.
Мышца, которая при сокращении приводит к возникновению момента сил и принимает на себя основную нагрузку, называется агонистом. Каждое сокращение мышцы-агониста приводит к полному расслаблению противоположной ей мышцы – антагониста. Если мы выполняем сгибание в локте, агонистом будет сгибатель локтя – бицепс (двуглавая мышца плеча), а антагонистом в этот момент будет разгибатель локтя – трицепс (трехглавая мышца плеча). После окончания движения моменты сил, создаваемые этими мышцами будут уравновешены, а сами мышцы находятся в немного растянутом состоянии. Это явление называется мышечным тонусом. Мышцы, помогающие выполнять движение мышце-агонисту и действующие в одном с ним направлении, но испытывающие меньшую нагрузку и меньшую степень сокращения, называются синергистами ( Синергисты (от греч. synergós – вместе действующий) в анатомии и физиологии – мышцы (или группы мышц), действующие совместно и функционально однородно; принимают участие в одном движении. Например, у млекопитающих животных и человека такие синергисты, как наружные межрёберные и межхрящевые мышцы, а также мышцы диафрагмы, сокращаясь одновременно, обеспечивают акт вдоха. Явление синергии обеспечивается регулирующей деятельностью центральной нервной системы [поиск по ключевому слову «Синергисты» dic.academic.ru].) Мышцы, обеспечивающие устойчивость и равновесие определенному суставу при выполнении движения, называются фиксаторами. Помимо фиксаторов значительную роль в тренировочном процессе выполняют мышцы стабили- заторы, которые работают в качестве элементов равновесия тела при смещении центра тяжести и увеличении общей силовой нагрузки. Кроме того, мышцы стабилизаторы участвуют в повседневной жизни человека в обеспечении равновесного расположения частей тела относительно друг друга вне зависимости от силовой нагрузки.
В любой момент движения кости образуют механические рычаги, следуя за мышечными усилиями. Биомеханика выделяет 2 вида биомеханических рычагов – рычаг 1 рода, где точки приложения силы расположены с противоположных сторон от оси, и рычаг 2 рода, где точки приложения силы располагаются по одну сторону от оси, но на разном от нее расстоянии.
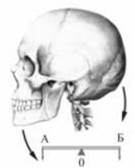
Рычаг 1 рода называется в биомеханике «рычагом равновесия» (рис. 1.48а). Поскольку точка опоры расположена между двумя точками приложения силы, рычаг еще называют «двуплечим» (условие равновесия – равенство по модулю моментов сил, действующих в противоположных направлениях F 1 l 1 =F 2 l 2). Такой рычаг имеет место, например, в соединении позвоночника и черепной коробки (рис. 1.48б). Если вращающий момент силы, действующей на затылочную часть черепа, равен вращающему моменту силы тяжести, действующему на переднюю часть, разнонаправленное действие моментов сил не ощущается и мышцы не напряжены. Это обстоятельство используется в быту – так, например, на Востоке девушки носят кувшины с водой на голове. На примере рычага первого рода можно продемонстрировать т.н. «золотое правило механики» (рис. 1.48в). Невесомая доска установлена на опору: на разноудаленные концы доски (l 1 и l 2) действуют разные по величине силы F 1 и F 2.
 |
 | |||
 | |||
а б в
Рис 1.48. а, б – Рычаги первого рода; в – иллюстрация «золотого
правила механики»
Чтобы поднять груз, расположенный на расстоянии l 2 (обозначим вес груза как силу противодействия F 2), на противоположном конце рычага в точке, расположенной на расстоянии l 1 от опоры, необходимо приложить усилие F 1, определяемое из условия F 1 l 1> F 2 l 2. По завершении подъема на некоторую высоту точки 1 и 2 переместятся соответственно на расстояния s1 и s 2.Очевидно, работа по подъему груза (преодолению сопротивления силы F 2), равна работе, совершаемой за счет силы F 1. Из этого следует, что F2s2. = F1s1. Т.е. выигрывая в силе, мы проигрываем в расстоянии и наоборот, проигрывая в силе, выигрываем в расстоянии. Это и есть «Золотое правило механики». Время движения обоих концов доски одинаково, следовательно, груз на конце длинного плеча перемещается с большей скоростью, чем точка приложения силы к концу более короткого рычага. Поэтому короткий рычаг называют «рычагом скорости», длинный рычаг – «рычагом силы». Это правило широко и весьма эффективно используется в самых разных ситуациях. Известное высказывание, приписываемое Архимеду, «Дайте мне точку опоры, и я сдвину землю» породило термин «Архимедов рычаг», употребляемый в значении: двигательная сила вообще.
Рычаг 2 рода представлен на рис 1.49. В биомеханике он подразделяется на два вида: «рычаг силы» и «рычаг скорости».
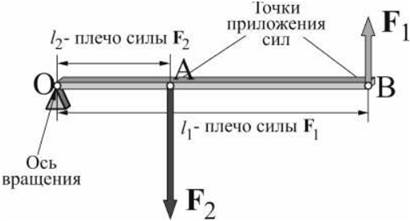 |
Рис. 1.49. Рычаг второго рода
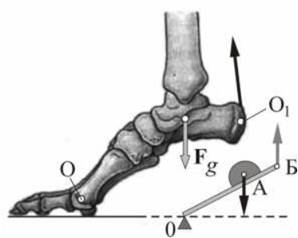
Название и действие этих рычагов зависит от места расположения приложения нагрузки, но у рычагов обоих видов точка приложения силы и точка приложения сопротивления находятся по одну сторону от оси вращения, поэтому оба рычага являются «одноплечими». Рычаг силы образуется при условии, что длина плеча приложения силы мышц длиннее плеча приложения силы тяжести (сопротивления). В качестве примера можно продемонстрировать человеческую стопу (схематически эта разновидность рычагов представлена на рис 1.50а).
 | |||
 | |||
а б
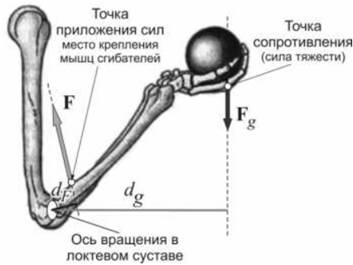
Рис. 1.50. а – Рычаг силы, б – рычаг скорости
Условно «осями вращения» (в приведенных здесь примерах больше подходит термин «ось поворота», «поворотная ось») здесь являются головки плюсневых костей (условная точка О), пяточная кость (точка О1) служит точкой приложения мышечного усилия голеностопного сустава, а сила тяжести тела F g образует силу сопротивления в голеностопном суставе. Здесь имеет место выигрыш в силе за счет более длинного плеча приложения мышечной силы и проигрыш в скорости (как видно из рис. 1.50а, плечо силы противодействия (силы тяжести) короче, чем плечо приложения мышечной силы). Примером рычага скорости может служить работа мышц сгибателей в локтевом суставе (схематически представлено на рис. 1.50б). Бицепс крепится вблизи оси «вращения» (локтевой сустав) и при таком коротком плече необходима дополнительная сила мышце сгибателя. Здесь имеет место выигрыш в скорости и ходе движения, но проигрыш в силе. Можно заключить, что чем ближе от места опоры будет крепиться мышца, тем короче будет плечо рычага и тем значительнее будет проигрыш в силе (короткорукие, длиннорукие – распространенные понятия).
При соединении двух костных пар образуется биокинетическая пара, характер движения в которой определяется строением костного сочленения (сустава), работой мышц, сухожилий и связок. Подвижность в суставе может зависеть от многочисленных факторов. Прежде всего, это анатомический – форма костей во многом определяет направление и размах кости в суставе. Далее – центрально-нервная регуляцией тонуса мышц, а также напряжением мышц-антагонистов. А именно, от способности расслаблять растягиваемые мышцы и напрягать мышцы. Иными словами, от степени межмышечной координации. Естественно, подвижность суставов зависит от пола и возраста.
Для того, чтобы оптимально и правильно принять исходное положение для выполнения физических действий, необходимо руководствоваться свойствами рычагов первого и второго типов. Если мы изменим положение конечности или туловища, то определенным образом изменится длина плеча рычага конечности или туловища. Очевидно, в любом случае исходное положение всегда выбирается таким образом, чтобы начальный период тренировки сопровождался менее нагружающими положениями конечностей и корпуса. В дальнейшем, в зависимости от физического состояния и формы тренирующегося (а также от вида физической нагрузки, например, вида спорта), можно постепенно увеличивать длину плеча рычага, для усиления воздействия на определенную мышечную группу. Увеличение силы противодействия одновременно с удлинением плеча рычага, в свою очередь, еще больше акцентирует внимание на укрепление силы конкретной мышечной группы или одной мышцы.
Для осуществления технически грамотного движения при физических нагрузках необходимо знать, как работает сустав, соединяющий активную мышечную группу [5а, 5б].
Опорно-двигательный аппарат человека представляет собой различные костные сочленения, соединенные друг с другом посредством суставов, структура которых и определяет возможности совершать те или иные движения. Виды и названия суставов можно найти в соответствующей литературе по анатомии, а виды и описание осей вращения и анатомических плоскостей, определяющих возможность осуществить то или иное движение, приведены в пособиях по кинезиологии*.
* Кинезиология – (кинезис – движение, логос – учение) – научная и практическая дисциплина, изучающая мышечное движение во всех его проявлениях. Кинезиологию следует отличать от различных методов хиропрактики, имеющих в своём названии слово «кинезиология» – «прикладная кинезиология» (англ. Applied kinesiology), «образовательная кинезиология» (англ. Edu-K) и других, научная обоснованность которых либо отсутствует, либо является спорной.