Исследуется функционирование шины (косы) управления в условиях водного контакта элементов цепи друг с другом, который происходит при использовании глубоководных разъёмов для подключения оптических модулей к PC-сфере. Выясняется зависимость параметров приёма/передачи сигналов по цепи с применением коаксиального кабеля, а так же отсутствия согласующего резистора. Оценивается возможность использования аналогичной косы для управления оптическими модулями проектируемого нейтринного телескопа НТ1000.
Интерфейс RS-485
Для осуществления управления оптическими модулями (ОМ) от удаленного PC очень удобным является интерфейс RS-485 [10]. Популярность данного интерфейса определяется невысокой стоимостью портов и кабелей, а также стабильностью использования в различных областях техники.
Логические уровни интерфейса имеют повышенные значения напряжений, что способствует улучшению помехозащищённости обмена данными, а так же позволяет реализовать длинные линии передачи данных.
| Уровень логического < 0 > | Уровень логической < 1 > | |
| Передатчик | От +5 до +12 В | От –12 до –5 В |
| Приёмник | От +3 до +12 В | От –12 до –3 В |
Интерфейс RS-485 реализован на дифференциальных линиях связи. Его помехозащищённость очень хорошая. Суть его заключается в передаче одного сигнала по двум проводам. Обычно применяется витая пара с волновым сопротивлением 120 Ом. Такой способ передачи обеспечивает высокую устойчивость к синфазной помехе. Линии RS-485 могут быть длиной до 1 километра.
Персональный компьютер обычно оснащён штатным контроллером интерфейса RS-232. Преобразовать RS232/RS485 позволяет осуществить его сопряжение с интерфейсом RS-485. На его базе удобно строить распределённые системы сбора данных и управления. Данная схема соединения была реализована в системе управления модулями экспериментального стринга.
Основные причины использования интерфейса RS-485:
· дешевизна кабельного хозяйства и реализации портов
· большой парк работающего оборудования, использующего этот стандарт
· длина линии до 1 километра
Использование интерфейса RS-485 для управления модулями подводного телескопа связанно с рядом особенностей:
Во-первых, в телескопе используются специальные глубоководные разъёмы, рассчитанные на использование коаксиального кабеля с волновым сопротивлением 50 Ом. Данные разъёмы уже зарекомендовали себя в течении многих лет использования в телескопе, и было бы преждевременно от них отказываться. Поэтому вместо стандартной для RS-485 витой пары необходимо использовать коаксиальную линию.
Во-вторых, при больших расстояниях между управляемыми устройствами начинает проявляться эффект длинной линии: фронт сигнала, отразившийся в конце линии, может исказить текущий или следующий сигнал. Данная проблема решается включением в конец линии резистора с номиналом равным волновому сопротивлению линии (для поглощения волны). Но использование согласования в шине управления приведёт к повышению тока в линии, что негативно скажется на общем энергопотреблении стринга и, в случае разрыва линии, будет способствовать обильному электролизу воды.
В-третьих, как уже отмечалось выше, в конструкции глубоководных разъёмов есть недостаток: внешняя оболочка («земля») имеет контакт с водой, что может отразиться на функционировании интерфейса RS-485.
Для ответа на вопрос о возможности использования интерфейса RS-485 для управления оптическими модулями, с учётом вышесказанных особенностей, была создана коса управления.
Рис. 9. Внешний вид глубоководных разъёмов.

Коса управления
Рис. 10. Схема косы управления.
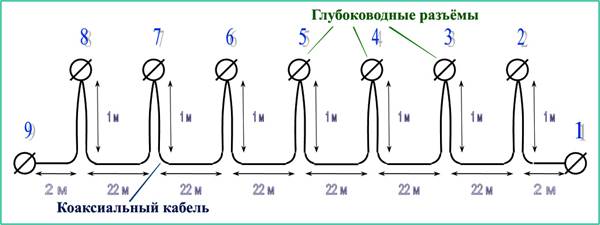
При создании косы использовался коаксиальный кабель с волновым сопротивлением 50 Ом. Общая длина косы – 150 метров.
|

Для тестирования косы контакты 3 – 8 подключались к контроллерам, идентичным установленным в оптических модулях экспериментального стринга. Начало линии (разъём 1) соединялся с персональным компьютером через преобразователь RS-232/RS-485. Все разъёмы помещались в специальную кювету, в которую набиралась водопроводная вода (её сопротивление на порядок меньше сопротивления чистой байкальской воды).
Далее, для выявления перебоев связи, компьютером производился последовательный опрос каждого контроллера (спрашивался сетевой адрес либо скорость линии). Была подготовлена специализированная программа длительного автоматического тестирования, в которой можно было задавать количество циклов опроса и сетевые адреса опрашиваемых контроллеров. Во время тестирования косы производилось до 50000 циклов опроса каждого контроллера в течении нескольких часов.
Результаты
В результате длительного тестирования косы перебоев связи выявлено не было, вне зависимости от нахождения разъёмов в водопроводной воде и использования нестандартного кабельного хозяйства. Так же линия работала и без согласующего резистора на её конце, что говорит о высокой надёжности интерфейса RS-485.
Выводы
Изготовленная коса управления показала высокую надёжность работы в условиях, характерных для подводного телескопа, и может послужить макетом для создания шины управления оптическими модулями проектируемого нейтринного телескопа НТ1000.