Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t1 = 1 с. В некоторых вариантах задачи при определении траектории или при последующих расчетах (для их упрощения) следует учесть известные из тригонометрии формулы:
соs 2  = 1 - 2sin2 = 2 соs2 - 1; sin 2 = 2 sin соs .
= 1 - 2sin2 = 2 соs2 - 1; sin 2 = 2 sin соs .
Даны уравнения движения точки в плоскости ху:

(х, у – в сантиметрах, t – в секундах).
Определить уравнение траектории точки; для момента времени t1 = 1 с найти скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Решение.
1. Для определения уравнения траектории точки исключим из заданных уравнений движения время t. Поскольку t входит в аргументы тригонометрических функций, где один аргумент вдвое больше другого, используем формулу

Из уравнений движения находим выражения соответствующих функций и подставляем в равенство (1). Получим:

следовательно,
Отсюда окончательно находим следующее уравнение траектории точки (парабола, рис. К1):
x = (y + 1)2 + 1 (2)
2. Скорость точки найдём по её проекциям на координатные оси:


| V1x =1,11см/c, V1y =0.73см/c, V1 =1,33 см/c (3) 3. Аналогично найдем ускорение точки: |
И при t = 1с

При t = 1с
 |
4. Касательное ускорение найдем, дифференцируя по времени равенство v2 = v2x + v2y Получим:
 Числовые значения всех величин, входящих в правую часть выражения (5), определены и даются равенствами (3) и (4). Подставив в (5) эти числа, найдем, что при t = 1 с
Числовые значения всех величин, входящих в правую часть выражения (5), определены и даются равенствами (3) и (4). Подставив в (5) эти числа, найдем, что при t = 1 с  = 0,66 см/с2.
= 0,66 см/с2.
5. Нормальное ускорение точки ап =  . Подставляя сюда найденные числовые значения
. Подставляя сюда найденные числовые значения  и , получим, что при t = 1 с а1п = 0,58 см/с2.
и , получим, что при t = 1 с а1п = 0,58 см/с2.
6. Радиус кривизны траектории  = v2/аn. Подставляя сюда числовые значения vl и aln, найдем, что при t = 1 с
= v2/аn. Подставляя сюда числовые значения vl и aln, найдем, что при t = 1 с  = 3,05 см.
= 3,05 см.
Ответ: vl = 1,33 см/с, al = 0,88 см/с2, alτ. = 0,66 см/с2, а1n = 0,58 см/с2, 1 = 3,05 см.
Задача К2
При решении задач на движение плоских механизмов, представляющих собой совокупность стержней или колес, или тех и других вместе, рассматривают последовательно движение отдельных звеньев механизма. При этом следует начинать с того звена, движение которого задано. При переходе от одного звена к другому определяют скорости и ускорения тех точек, которые являются общими для двух соседних звеньев. Мгновенный центр скоростей, угловые скорости и угловые ускорения следует находить для каждого звена в отдельности.
Если требуется найти скорости нескольких точек, то наиболее эффективным является решение задач при помощи мгновенного центра скоростей. Если же требуется найти скорость какой-либо одной точки, то удобно применять к решению задачи теорему о равенстве проекций скоростей двух точек плоской фигуры на ось, проходящую через эти точки.
Плоский механизм состоит из стержней 1 - 4 иползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис. К2.0 – К2.9). Длины стержней: 11 = 0,4 м, 12 = 1,2 м, 13 = 1,4 м, 14 = 0,8 м. Положение механизма определяется углами α, β, γ, φ, θ, которые вместе с другими величинами заданы в табл. К2. Точка D на всех рисунках и точка К на рис. К2.7 – К2.9 в середине соответствующего стержня.


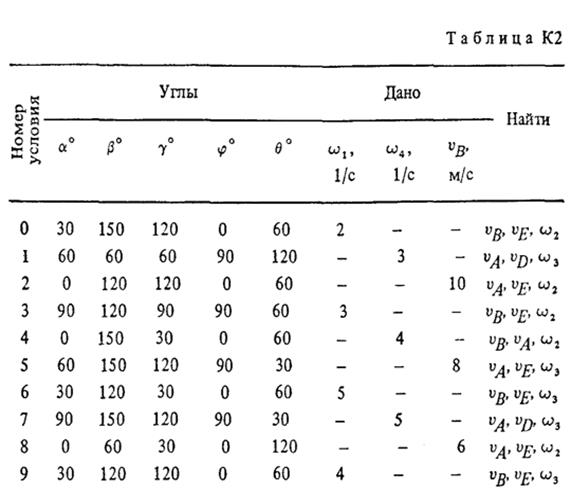
Определить величины, указанные в таблице в столбце "Найти". Найти также ускорение аА точки А стержня 1, если стержень 1имеет в данный момент времени угловое ускорение  = 10 с-2. Дуговые стрелки на рисунках показывают, как при построении чертежа должны откладываться соответствующие углы, т. е. по ходу или против хода часовой стрелки (например, угол
= 10 с-2. Дуговые стрелки на рисунках показывают, как при построении чертежа должны откладываться соответствующие углы, т. е. по ходу или против хода часовой стрелки (например, угол  на рис. 1 следует отложить от стержня DE против хода часовой стрелки, а на рис. 2 – от стержня АЕ по ходу часовой стрелки).
на рис. 1 следует отложить от стержня DE против хода часовой стрелки, а на рис. 2 – от стержня АЕ по ходу часовой стрелки).
Построение чертежа начинать со стержня, направление которого определяется углом ; ползун В и его направляющие для большей наглядности изобразить, как в примере К2 (см. рис. К2). Заданную угловую скорость считать направленной против хода часовой стрелки, а заданную скорость vB – от точки В к b.