Датчик (следование по одному краю)
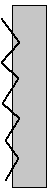
Для данного способа следования по линии необходим только один датчик. На самом деле робот следует не по самой линии, а по её границе, постоянно переходя от темного к светлому. На роботе также устанавливается два привода, один двигатель включается, когда линия видна, но выключается, когда линия не видна, другой активируется, когда линия не видна, но выключается, когда линия видна. И таким образом робот, виляя из стороны в сторону, двигается вдоль границы чёрного и белого. Это отлично работает на более медленных скоростях, но становится непригодным для использования в скоростном боте. Если датчик пересекает линию, он может развернуться и поехать в обратном направлении, если робот теряет линию, он начинает постоянно вращаться. Из–за простоты, такой тип датчика редко используется в схемах ботов с микроконтроллерами. Датчик может быть в одном из двух возможных состояний 1 или 0 (см. рисунок)
Условия работы сенсора:
0 – линия не видна
1 – линия видна
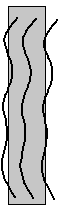
Датчика (исключение линии)

Принцип работы похож на первый датчик, но каждый датчик контролирует свой двигатель. Линия находится между датчиков, а они в свою очередь стараются избегать её. На большой скорости эта схема работает лучше, чем предыдущая. Но если линия будет потеряна, то робот начнёт блуждать. Это происходит потому, что бот не может отличить границы линии, и её потерю. Этот недостаток можно устранить программно, если в качестве мозга робота используется микроконтроллер. Чем меньше зазор между линией и датчиком, тем аккуратнее робот будет следовать по линии.
Условия работы сенсора:
00 - граница линии потеряна
01- линия справа
10 - линия слева
11 - Не используется, если расстояние между датчиками больше чем ширина линии.
Датчика (предвидение линии)
При добавлении третьего датчика к предыдущему дизайну, бот может, определять линии и ее края. Тем самым робот может замечать съезд с линии. Также данная схема, легче адаптируется к меняющимся условиям, можно увеличить скорость на прямой, или настроить управление более тонко.
Это одна из наиболее распространенных конструкций, мозгом робота с таким количеством сенсоров в основном является микроконтроллер.
Условия работы сенсора:
001 - линия слева
010 -линия по центру
011 - линия ушла немного влево
100 - линия справа
101 - не используется
110 - линия ушла немного вправо
111 - Не используется (но может использоваться для слежения линии в лабиринте или на сложных трассах с перекрёстками)
5 Датчиков ("пляски" по линии)
Трёх датчиков, очевидно, достаточно, чтобы эффективно следовать линии, так почему же мы хотим добавить еще два? Ответ на этот вопрос сводится к главному качеству роботов для следования по линии - скорость. Добавление еще двух датчиков повышает чувствительность, и датчики могут с большим разрешением распознавать положение линии под бампером робота. Когда бот движется не слишком быстро, есть много времени для регулировки направления и скорости, чтобы удержаться на линии. Что же происходит, когда скорость значительно увеличивается? Вместо того чтобы изящно следовать линии, бот начинает избыточно поворачиваться и может вылететь с трассы.

С этим можно бороться двумя различными способами:
1. Уменьшить скорость, пока бот не станет управляемым.
2. Планировать и компенсировать скорость.
В какой-то момент из–за скорости, ваш робот будет преодолевать способность контролировать себя. Зная это, вы можете запрограммировать его, для коррекции выброса бота за линию, чтобы он был в состоянии найти линию еще раз.
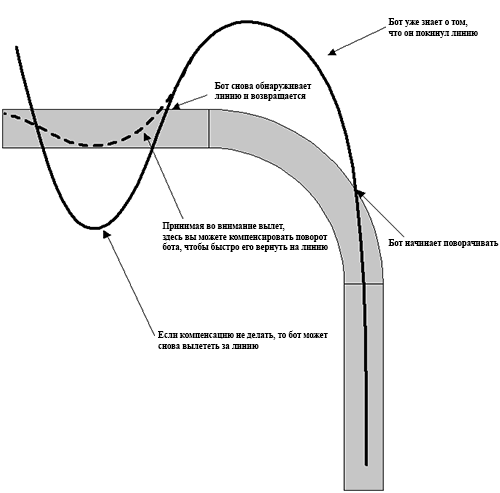
В примере на фото выше, робот потерял линию, когда вошёл в поворот. Так как он начал поворачивать налево, когда линия из под него ушла, он знает, что нужно повернуть налево, пока не найдет полосу, крайним левым датчиком (на довольно остром углу) перед любым другим датчиком. В нормальных условиях только левый датчик, видя линию, будет поворачивать робота до упора влево. Но только для того чтобы привести его к линии не включаясь в неё. Это вернёт бота обратно на трассу, и не даст ему перелететь через полосу. В отличие от предыдущей схемы здесь очень важно наличие ещё двух дополнительных датчиков. Они служат для более точного управления и быстрого реагирования на выброс и избыточную поворачиваемость