Температура является показателем термодинамического состояния системы и используется как выходная координата при регулировании тепловых процессов. Динамические характеристики объектов в системах регулирования температуры зависят от физико-химических параметров процесса и конструкции аппарата. Поэтому общие рекомендации по выбору АСР температуры сформулировать невозможно, и требуется анализ каждого конкретного процесса.
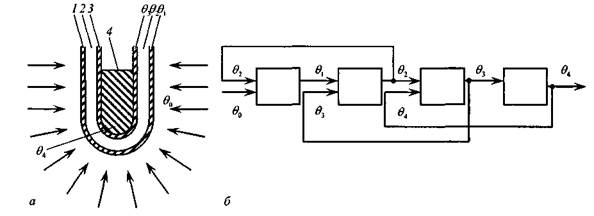
Рис. 3.10. Принципиальная (а) и структурная (б) схемы термометра:
1 - защитный чехол; 2 - воздушная прослойка; 3 - стенка термометра; 4 - рабочая жидкость.
К общим особенностям АСР температуры можно отнести значительную инерционность тепловых процессов и промышленных датчиков температуры. Поэтому одна из основных задач при проектировании АСР температуры - уменьшение инерционности датчиков.
Рассмотрим, например, динамические характеристики термометра в защитном чехле (рис. 3.10).
Структурную схему термометра можно представить как последовательное соединение четырех тепловых емкостей (рис. 3.10, б): защитного чехла 1, воздушной прослойки 2, стенки термометра 3 и собственно рабочей жидкости 4. Если пренебречь тепловым сопротивлением каждого слоя, то все элементы можно аппроксимировать апериодическими звеньями 1-го порядка, уравнения которых имеют вид:

или

где

(3.4)
Mj - масса соответственно чехла, воздушной прослойки, стенки и жидкости; cPj - удельные теплоемкости; αji, αj2 - коэффициенты теплоотдачи; FJb Fj2 - поверхности теплоотдачи.
Как видно из уравнений (3.1), основными направлениями уменьшения инерционности датчиков температуры являются:
- повышение коэффициентов теплоотдачи от среды к чехлу в результате правильного выбора места установки датчика; при этом скорость движения среды должна быть максимальной; при прочих равных условиях более предпочтительна установка термометров в жидкой фазе (по сравнению с газообразной), в конденсирующемся паре (по сравнению с конденсатом) и т. п.;
-уменьшение теплового сопротивления и тепловой емкости защитного чехла в результате выбора его материала и толщины;
-уменьшение постоянной времени воздушной прослойки за счет применения наполнителей (жидкость, металлическая стружка); у термоэлектрических преобразователей (термопар) рабочий спай припаивается к защитному чехлу;
-выбор типа первичного преобразователя; например, при выборе термометра сопротивления, термопары или манометрического термометра необходимо учитывать, что наименьшей инерционностью обладает термопара в малоинерционном исполнении, наибольшей - манометрический термометр.
Регулирование рН.
Системы регулирования рН можно под-разделить на два типа, в зависимости от требуемой точности регулирования. Если скорость изменения рН невелика, а допустимые пределы ее колебаний достаточно широки, применяют позиционные системы регулирования, поддерживающие рН в заданных пределах: рН„ < рН < рНв. Ко второму типу относятся системы, обеспечивающие регулирование процессов, в которых требуется точное поддержание рН на заданном значении (например, в процессах нейтрализации).
Для их регулирования используют непрерывные ПИ- или ПИД-регуляторы.
Общей особенностью объектов при регулировании рН является нелинейность их статических характеристик, связанная с нелинейной зависимостью рН от расходов реагентов. На рис. 3.11 показана кривая титрования, характеризующая зависимость рН от расхода кислоты Gi.
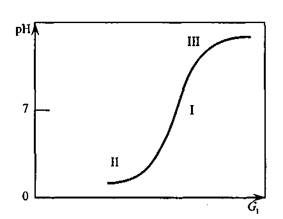
Рисунок 3.11 - Зависимость величины рН от расхода реагента
Для различных заданных значений рН на этой кривой можно выделить три характерных участка: первый (средний), относящийся к почти нейтральным средам, близок к линейному и характеризуется очень большим коэффициентом усиления; второй и третий участки, относящиеся к сильно щелочным или кислым средам, обладают наибольшей кривизной.
На первом участке объект по своей статической характеристике приближается к релейному элементу. Практически это означает, что при расчете линейной АСР коэффициент усиления регулятора настолько мал, что выходит за пределы рабочих настроек промышленных регуляторов. Так как собственно реакция нейтрализации проходит практически мгновенно, динамические характеристики аппаратов определяются процессом смешения и в аппаратах с перемешивающими устройствами достаточно точно описываются дифференциальными уравнениями 1-го порядка с запаздыванием. При этом, чем меньше постоянная времени аппарата, тем сложнее обеспечить устойчивое регулирование процесса, так как начинают сказываться инерционность приборов и регулятора и запаздывание в импульсных линиях. Для обеспечения устойчивого регулирования рН применяют специальные системы. На рис. 3.12, а показан пример системы регулирования рН с двумя регулирующими клапанами.-

Рисуцнок 3.12 - Пример системы регулирования рН:
а - функциональная схема; б - статические характеристики клапанов (1, 2 — регулирующий клапан; 3 - регулятор рН).
Клапан 1, обладающий большим условным диаметром, служит для грубого регулирования расхода и настроен на максимальный диапазон изменения выходного сигнала регулятора [ХрН,ХрВ] (рис. 3.12, б, кривая 1). Клапан 2, служащий для точного регулирования, рассчитан на меньшую пропускную способность и настроен таким образом, что при Хр = Х0р + D - он полностью открыт, а при Хр = Х0р - D - полностью закрыт (кривая 2). Таким образом, при незначительном отклонении рН от рН0, когда х0р - D < Хр < Х0р + D степень открытия клапана 1 практически не изменяется, и регулирование ведется клапаном 2. Если |Хр – Х0р|, клапан 2 остается в крайнем положении, и регулирование осуществляется клапаном 1.
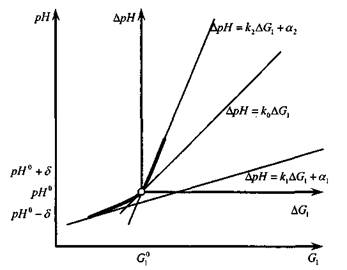
Рисунок 3.13. Кусочно-линейная аппроксимация статической характеристики объекта при регулировании рН.
На втором и третьем участках статической характеристики (рис. 3.12, б) ее линейная аппроксимация справедлива лишь в очень узком диапазоне изменения рН, и в реальных условиях ошибка регулирования за счет линеаризации может оказаться недопустимо большой. В этом случае более точные результаты дает кусочно-линейная аппроксимация (рис. 3.13), при которой линеаризованный объект имеет переменный коэффициент усиления.
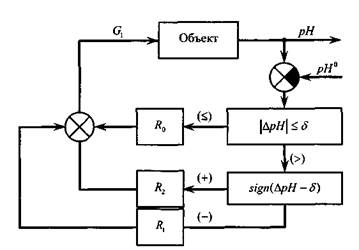
Рисунок 3.14 - Структурная схема системы регулирования рН с двумя регуляторами.
На рисунке 3.14 приведена структурная схема такой АСР. В зависимости от рассогласования рН, включается в работу один из регуляторов, настроенный на соответствующий коэффициент усиления объекта.