Перспективные направления применения всенаправленных колес
Д.А. Гончаренко, К.А. Гаричев, Л.М. Шамахов
Научный руководитель-Л.М. Шамахов, инженер
Ярославский государственный технический университет
В данной работе рассматривается практическое применение всенаправленных колес в промышленности. Ключевые слова: всенаправленные колеса, омни-колесо, меканум-колесо порядок вращения колес, перемещение мобильной платформы.
Promising applications for omnidirectional wheels
D.A. Goncharenko, K.A. Garichev, L.M. Shamakhov
Scientific Supervisor – L.M. Shamakhov, engineer
Yaroslavl State Technical University, Russia, Yaroslavl
In this paper, the practical application of omnidirectional wheels in industry is considered.
Keywords: Omnidirectional wheels, Omni-wheel, Mecanum-wheel, wheel rotation order, direction, movement of the mobile platform.
В последнее время, всенаправленное колесо (или колесо Илона или шведское колесо), получили широкое практическое применение. Это обусловлено тем, что колеса обеспечивают максимальную маневренность в стесненных условиях. Конструкция колеса позволяет транспортному средству осуществлять передвижение в любом направлении, включая движение по диагонали и по кругу, и в тоже время обеспечивает высокую точность позиционирования. Данные колеса представляют собой (рис.1) два диска 1, между которыми установлены свободновращающиеся ролики 2. Всенаправленное колёсное шасси обычно исполнено на двух типах роликонесущих колес. Так в работе [1] рассматриваются платформы на омни- и меканум-колесах. В омни-колесах оси роликов направленны вдоль плоскости колеса, когда как в меканум-колесах оси роликов расположены под углом 45°. Меканум-колеса благодаря углу между осью ролика и плоскостью колеса обладает большей грузоподъемностью [2] и обеспечивает постоянный контакт с поверхностью опоры. Поэтому использование шасси на меканум-колесах целесообразно для грузовых мобильных платформ, что можно заметить при изучение рынка – именно такой тип роликонесущих колес применяется в промышленности.














1 – диск; 2 – ролик;
Рис.1 – Всенаправленное колеса: а – омни-колеса, б – меканум-колеса
Так, например, немецкая компания KUKA [3] одна из немногих, которая занимается внедрением мобильных роботизированных систем на всенаправленных колесных шасси в промышленное производство. В разработках компании есть, различного рода мобильные робототехнические системы (рис.2, а), подъемные платформы (рис.2, б), транспортировочные платформы (рис.2 в). Роботизированные системы гарантируют большую свободу передвижения благодаря колесам Илона, а так обеспечивается транспортировка тяжелых грузов.




Рис.2 – Разрабоки компании KUKA[3]: а - мобильная промышленная робототехническая система KMR QUANTEC, б – мобильная подъемная рабочая платформа KUKA Triple Lift, в – транспортировочная платформа KUKA omniMove.
Еще одним примером применения всенаправленных колес является устройство для перемещения оборудования по внешней поверхности труб [4]. Устройство имеет три кольцеобразно установленных модуля каждый из которых имеет два колеса Илона. Колеса установлены с возможностью изменения направления и скорости вращения. Данное решение обеспечивает перемещение оборудования по заданной траектории с высокой точностью.
Перемещение роботизированных платформ на всенаправленных колесных шасси основано на определенном порядке вращения колес:
- платформа совершает обороты вокруг своей оси, когда колеса справа движутся вперед, а слева назад, и наоборот;
- платформа движется в туже сторону, что и все колеса;
- платформа движется диагонально, когда два расположенных по диагонали колеса вращаются в одном направлении, остальные два колеса не движутся;
- платформа перемещается в сторону, когда два колеса этой стороны совершают обороты по направлению к центру, остальные два от центра.







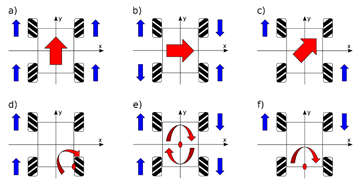
Рис.3 – Схема вращения колес: а – движение прямо, б – движение в сторону, в – движение по диагонали, г – движение во круг одного колеса, д – движение во круг центральной оси, е – движение смещенной оси.
При рассмотрении всенаправленных колес можно сделать вывод, что данные колеса помогают достичь максимальной маневренность в стесненных помещениях и при этом не потерять эффективность работы устройств.
СПИСОК ЛИТЕРАТУРЫ
1. Spyros G. Tzafestas. Introduction to Mobile Robot Control. – Elsevier, 2014. – 750 p
2.Doroftei I. Grosu V. Spinu V. Omnidirectional Mobile Robot – Design and Implementation // Bioinspiration and Robotics: Walking and Climbing Robots. – 2007. P. 511-528
3.Мобильная платформа KUKA. [Электронный ресурс]. Режим доступа: https://www.kuka.comru-ru. Дата обращения - 16.03.2022.
4. Патент RU 2754645, МПК B62D 57/00, B08B 9/023, B25J 5/00. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ПО ТРУБАМ/ Дорошинский М.М. – опубл. 06.09.2021. [Электронный ресурс]. Режим доступа: https://www.elibrary.ru/item.asp?id=46605528. Дата обращения – 16.03.2022.