ЭЛЕКТРОПРИВОД
Основные понятия и определения
Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенная для приведения в движение рабочих органов машин и управления этим движением.
Электроприводы различны по своим техническим характеристикам: по мощности, скорости вращения, конструктивному исполнению Диапазон мощности электроприводов очень широк – от несколько ватт в различных приборах и устройствах автоматики до нескольких тысяч киловатт в приводах прокатных станов, компрессоров газоперекачивающих станций. Электропривод бытовых приборов и машин обычно составляет от 10 до 1000 Вт, электропривод станков – от 0,25 кВт до 100 кВт и т.д.. Также велик диапазон электроприводов по скорости вращения. Так, скорость вращения центрифуг доходит до 100 000 об/мин. Есть механизмы, у которых скорость вращения рабочего органа составляет менее одного оборота в минуту.
Электроприводы нашли применение не только в промышленном производстве, но и в сельском хозяйстве, транспорте, медицине, электробытовых установках и др. С энергетической точки зрения электропривод – главный потребитель электрической энергии: сегодня в развитых странах он потребляет более 60% всей производимой электроэнергии.
Структурная схема электропривода и назначение его элементов.
Жирными стрелками на рис. 6.1 показаны силовые каналы передачи электрической и механической энергии, а тонкими - каналы передачи сигналов управления.
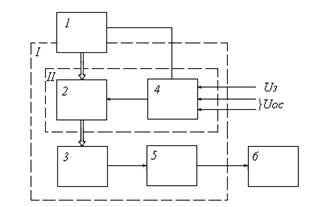
Рис. 6.1 Структурная схема ЭП
1 – Источник электроэнергии шины промышленной электрической сети, автономный электрогенератор, аккумуляторная батарея и т.п.
2 – Силовой (электрический) преобразователь – устройство, передающее электроэнергию от источника к электромагнитному преобразователю (двигателю) и обратно, и, осуществляющее при необходимости. преобразование этой электроэнергии, т.е. служит для передачи электроэнергии требуемых параметров. Бывают неуправляемыми – трансформаторы, выпрямители и т.п. и управляемыми – управляемые выпрямители, преобразователи частоты и т.п.
3 – Электромеханическое устройство - основной элемент электропривода – электродвигатель (ЭД), который преобразует электрическую энергию в механическую.
4 – Управление преобразователем осуществляется от блока управления (4), на вход которого поступают задающий сигнал Uз и сигналы Uос обратной связи (ОС), содержащие информацию о характере движения исполнительных органов, работе отдельных узлов, аварийных режимах. Преобразователь вместе с блоком управления образуют систему управления.
5 – Передаточное устройство (редукторы; передачи: винтовые, зубчатые, ременные, барабанно-канатные, кривошипно-шатунные механизмы) осуществляет согласование момента М и скорости  двигателя с моментом Мм (усилием Fм) и скоростью wм рабочего органа технологической машины.
двигателя с моментом Мм (усилием Fм) и скоростью wм рабочего органа технологической машины.
6 – Рабочая машина.
По общности выполняемых операций и принципу действия рабочие машины можно объединить в следующие группы:
● турбомеханизмы: насосы, вентиляторы, турбокомпрессоры;
● грузоподъемные машины: краны, лифты, подъемники и др.;
● транспортные машины: конвейеры, эскалаторы и др.;
● металлообрабатывающие станки;
● машины возвратно-поступательного движения: прессы, поршневые насосы и компрессоры;
● экскаваторы;
● прокатные станы.
Классификация электроприводов.
Существует большое разнообразие электроприводов. Их классификация обычно производится по виду движения и степени управляемости эл.привода, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам и ряду других признаков.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер.
По принципам регулирования скорости и положения электропривод может быть:
· нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью);
· регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса);
· следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом);
· программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой);
· адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
· позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
· вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии;
· система управляемый выпрямитель – двигатель (УВ – Д) – вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель;
· система преобразователь частоты – двигатель (ПЧ – Д) – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемой преобразователь частоты;
· система генератор – двигатель (Г – Д) и магнитный усилитель – двигатель (МУ – Д) – регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель.
По способу передачи механической энергии исполнительному органу электроприводы делятся на индивидуальный, взаимосвязанный и групповой.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган.
Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин.
Координаты электропривода.
Величины, характеризующие преобразуемую энергию, – напряжения, токи, моменты (силы), скорости называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешенных конструкцией элементов электропривода, чем обеспечивается надежность работы системы. Эти допустимые пределы обычно связаны с номинальными значениями координат, назначенными производителями оборудования и обеспечивающими его оптимальное использование.
В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери  Р во всех элементах и к рабочему органу должна подводиться требуемая в данный момент мощность.
Р во всех элементах и к рабочему органу должна подводиться требуемая в данный момент мощность.
Требования, предъявляемые к электроприводам
Основное влияние на режим работы электропривода и на требования, предъявляемые к нему, оказывает характер технологического процесса. По характеру технологического процесса все машины и механизмы можно разделить на две группы: механизмы непрерывного действия и механизмы циклического действия. В первой группе технологический процесс протекает непрерывно, во второй – технологический процесс состоит из однотипных повторяющихся циклов.
Электроприводы механизмов непрерывного действия характеризуются редкими пусками, не требуют, как правило, реверсирования и точного останова. Электроприводы механизмов циклического действия отличаются от них частыми пусками, реверсами и необходимостью регулирования скорости и точным остановом.
Общие требования, которые предъявляют к электроприводам всех механизмов:
– обеспечение заданного технологического процесса и требуемой производительности;
– обеспечение требуемых условий пуска и торможения производственных механизмов, а при необходимости – реверсирования и регулирования скорости;
– ограничение перегрузок – динамических и ударных;
– обеспечение требуемого уровня автоматизации (управление автоматическое, полуавтоматическое и т.п.);
– обеспечение надежности,
– конструктивная защищенность электрооборудования в зависимости от условий окружающей среды, климатического исполнения;
– минимальные стоимость и затраты электроэнергии на работу электропривода;
– экологические: уровень шума и ограничение влияния электропривода на сеть питающего напряжения, связанное с искажениями, вызываемыми высшими гармониками тока.
В требованиях указываются также параметры электроснабжения (вид и величина питающего напряжения, частота, допустимые отклонения и т.п.).
Режимы работы электропривода
Все режимы в электроприводе делятся на установившиеся (номинальный режим работы) и переходные (пуск, реверс, торможение ).
Установившийся режим работы электропривода определяется из условия равенства нулю динамического момента. Этот режим характеризуется работой двигателя с неизменной угловой скоростью, постоянными во времени и равными по величине моментом двигателя и моментом сопротивления. Так как момент, развиваемый двигателем в установившемся режиме, есть функция скорости, то равенство М = Мс возможно только при условии, что момент сопротивления – постоянная величина или функция скорости. Если МС есть функция, например, пути (угла поворота), то даже при постоянной угловой скорости момент сопротивления изменяется во времени и установившийся режим невозможен.
Установившийся режим описывается статическими характеристиками.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т.п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.).
Характер переходного режима электропривода зависит от свойств рабочей машины, типа примененного двигателя и механической передачи, принципа действия и свойств аппаратуры управления, а также от режима работы двигателя (пуск, торможение, прием и сброс нагрузки и т. д.)
По длительности непрерывной работы электродвигателя различают режимы: длительный, кратковременный и повторно-кратковременный.
Длительным называют режим работы, при котором рабочий период электродвигателя настолько велик, что нагрев последнего достигает своего стабильного состояния. При таком режиме работают двигатели вентиляторов, насосов и других механизмов непрерывного действия.
Кратковременный режим работы характеризуется тем, что в течение рабочего периода нагрев электродвигателя не достигает стабильного состояния, а перерыв в работе настолько велик, что при возобновлении ее температура двигателя близка к температуре окружающей среды. При таком режиме, например, работают двигатели подъема стрелы одноковшового экскаватора. Их работа продолжается несколько минут, после чего они надолго выключаются.
При повторно-кратковременном режиме рабочие периоды чередуются с паузами, т. е. с периодами остановки электродвигателя. За период работы двигатель не успевает полностью нагреться, а за период остановки – полностью остыть. Повторно-кратковременный режим дополнительно подразделяется на режим периодический и непериодический. При таких режимах работают электродвигатели кранов, лифтов и других подъемных механизмов. Рассматриваемый режим характеризуется показателем ПВ (продолжительность включения), который равен отношению продолжительности рабочего периода к продолжительности цикла (рабочего периода и остановк
Нагрузочные диаграммы и тахограммы
Основой для выбора электропривода и расчета его мощности являются нагрузочные диаграммы и диаграмма скорости (тахограмма) (рис.6.2). Нагрузочной диаграммой производственного механизма называют зависимость приведенного к валу двигателя момента сопротивления движению Мс (статического момента) от времени: Мс =f(t). Эту диаграмму рассчитывают на основе данных, характеризующих работу машины (механизма).
Нагрузочная диаграмма электропривода – это зависимость момента, развиваемого двигателем от времени. Ее рассчитывают как алгебраическую сумму статического Мс и динамического Мдин моментов: М= Мс + Мдин = f(t).
Тахограмма – это зависимость скорости рабочего органа машины или вала двигателя от времени ω= f(t) (рис. 6.2 пунктирные линии ).
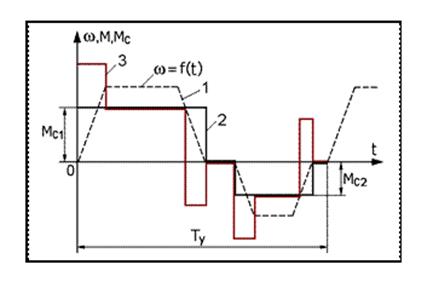
Рис 6.2 Нагрузочные диаграммы и диаграмма скорости (тахограмма)
Расчет мощности и выбор типа электродвигателя
При выборе приводного электродвигателя осуществляют:
● расчет мощности электродвигателя;
● расчет номинальной скорости и определение передаточного отношения механической передачи;
● выбор двигателя в соответствии с режимом его работы по условиям нагрузки;
● выбор двигателя по условиям пуска;
● определение необходимой степени защиты оболочки двигателя;
● выбор конструктивного исполнения на соответствие условиям окружающей среды;
● выбор системы охлаждения двигателя.
Расчеты температуры перегрева двигателя в соответствии с известной нагрузочной диаграммой весьма трудоемки. Наиболее точным методом является метод средних потерь энергии ΔРср в двигателе. Для каждой нагрузки определяют потери в двигателе и затем находят среднее значение потерь за цикл работы. На практике наиболее часто применяют методы определения эквивалентных величин: тока, момента или мощности.
Методы эквивалентных величин
Метод эквивалентного тока
Потери в двигателях примерно пропорциональны току в квадрате. Зная график тока, протекающего по обмоткам двигателя, можно определить для каждого конкретного режима работы значение эквивалентного тока Iэкв , характеризующее его нагрев.
Эквивалентный ток Iэкв – это такой ток с постояннымзначением, который вызывает такой же нагрев электродвигателя, как и реально протекающий с изменяющим значением в соответствии с графиком нагрузки механизма:
Метод эквивалентного тока дает достаточно достоверные результаты, если сохраняется постоянство сопротивлений двигателя и потерь в стали независимо от нагрузки.
Метод эквивалентного момента
Если момент двигателя пропорционален току, то можно пользоваться методом эквивалентного момента.
Эквивалентный момент Мэ – это постоянный момент нагрузки, который вызывает такой же нагрев двигателя, как и реально изменяющийся момент в соответствии с графиком работы механизма
Условие правильности выбора двигателя  ,
,
где Мн - номинальный момент двигателя.
Этот метод применим для двигателей постоянного тока с независимым возбуждением, для асинхронных двигателей и других, у которых момент пропорционален току и соблюдены условия, указанные для метода эквивалентного момента.
Метод эквивалентной мощности
Если скорость двигателя изменяется мало и можно считать, что мощность пропорциональна моменту и, следовательно, току, то эквивалентная мощность
Производить проверку двигателя на нагрев по эквивалентной мощности можно для нерегулируемых по скорости электродвигателей, у которых момент пропорционален току. Условия правильности выбора электродвигателя:  .
.
Основные формулы для решения задач
Эквивалентный ток

где: tц – время цикла; I1, I2, … In - ток соответственно в течение времени t1 , t2, … tn.
Условие проверки двигателя на нагрев:  ,
,
где: Iн – номинальный ток двигателя.
Эквивалентный момент

где: M 1,M2, … Mn - моментсоответственно в течение времени t1 , t2, … tn.
Условие правильности выбора двигателя  ,
,
где: Мн - номинальный момент двигателя.
Эквивалентная мощность

где: P 1,P2, …Pn - мощностьсоответственно в течение времени t1 , t2, … tn.
Условия правильности выбора электродвигателя:  .
.
С учетом условия ухудшения охлаждения у двигателей с самовентиляцией во время пауз и при снижении скорости формула для эквивалентного тока:

где: β 1 =0,5 – коэффициент, учитывающий ухудшение условий охлаждения в процессе разгона и торможения двигателя; β 2 = 0,8 … 1,0 – коэффициент, учитывающий ухудшение условий охлаждения при работе с постоянной скоростью; β 0= 0,3 – коэффициент, учитывающий ухудшение условий охлаждения при стоянке двигателя в течение времени t 0 .
Уравнение моментов:
M = M с + M д
Где: M – вращающий момент двигателя; M с – статический момент сопротивления механизма; M д – динамический момент
 ;
;
J – момент инерции вращающихся масс;
 - угловое ускорение
- угловое ускорение
В установившемся режиме M = M с
Максимальный момент двигателя

 ,
,
где  – кратность максимального момента, для ДПТ 2 – 2.5, для АД – 1.6 – 2.5
– кратность максимального момента, для ДПТ 2 – 2.5, для АД – 1.6 – 2.5
Передаточное отношение от вала барабана к валу двигателя:

Статический момент на валу двигателя при подъеме груза
Суммарный момент инерции при подъеме груза

Продолжительность включения
где: Σtp ΣtП – сумма времени соответственно работы и пауз, если в цикле несколько операций;
Если расчетная ПВ (%) не соответствует стандартной, эквивалентную мощность рассчитывают по формуле;
Расчетная мощность двигателей:
1. вентиляторов  ;
;
где Q – производительность вентилятора; p - давление газа,  - КПД вентилятора;
- КПД вентилятора;  - КПД передачи.
- КПД передачи.
2. подъемных механизмов 
где G – масса груза; G 0 – масса захватывающего приспособления;  - КПД подъемного механизма
- КПД подъемного механизма
Задача 6.1 Выбрать по каталогу АД, предназначенный для привода механизма с циклическим графиком нагрузки в продолжительном или повторно-кратковременном режимах работы. Построить нагрузочную диаграмму, определить расчетную мощность двигателя, провести проверку по перегрузочной способности.
| №вар. | М1, 
| М2
| М3
|  ,с ,с
|  ,с ,с
|  ,с ,с
|  ,с ,с
|  
| 
|
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 | |||||||||
| 0.85 | |||||||||
| 0.95 | |||||||||
| 0.9 |
 - моменты нагрузки на валу для соответствующих участков графика нагрузки,
- моменты нагрузки на валу для соответствующих участков графика нагрузки,  – время работы двигателя с заданными моментами нагрузки, tП – время паузы, n – частота вращения двигателя,
– время работы двигателя с заданными моментами нагрузки, tП – время паузы, n – частота вращения двигателя,  – коэффициент, учитывающий возможное снижение напряжения сети.
– коэффициент, учитывающий возможное снижение напряжения сети.
| Тип двигателя | 
| 
| 
| ПВ=25% | ПВ=40% | ПВ=60% | ПВ=100% | ||||||||
 кВт
кВт
| η, % | cos φ |
кВт
| η, % | cosφ |
кВт
| η, % | cosφ |  кВт
кВт
| η, % | cosφ | ||||
| 4АС71А4УЗ | 2.0 | 2.2 | 8.2 | 0.65 | 67.0 | 0.76 | 0.6 | 68.0 | 0.73 | 0.6 | 68.0 | 0.73 | 0.60 | 68.0 | 0.73 |
| 4АС71В4УЗ | 2.0 | 2.2 | 8.7 | 0.9 | 68.0 | 0.77 | 0.8 | 68.5 | 0.75 | 0.8 | 68.5 | 0.75 | 0.70 | 69.0 | 0.74 |
| 4АС80А4УЗ | 2.0 | 2.2 | 5.6 | 1.3 | 68.5 | 0.82 | 1.3 | 68.5 | 0.82 | 1.1 | 70.0 | 0.8 | 0.95 | 70.5 | 0.79 |
| 4АС80В4У3 | 2.0 | 2.2 | 5.5 | 1.9 | 69.5 | 0.83 | 1.7 | 70.0 | 0.82 | 1.5 | 70.5 | 0.8 | 1.3 | 71.0 | 0.79 |
| 4АС90L4У3 | 2.0 | 2.2 | 5.8 | 2.4 | 76.0 | 0.82 | 2.4 | 76.0 | 0.82 | 2.2 | 76.5 | 0.8 | 1.9 | 77.0 | 0.78 |
| 4АС100S4У3 | 2.0 | 2.2 | 4.2 | 3.7 | 76.0 | 0.84 | 3.2 | 76.5 | 0.82 | 2.8 | 77.0 | 0.8 | 2.3 | 77.5 | 0.78 |
| 4АС100L4У3 | 2.0 | 2.2 | 4.1 | 5.0 | 77.0 | 0.84 | 4.3 | 78.0 | 0.82 | 3.8 | 79.0 | 0.8 | 3.3 | 80.0 | 0.78 |
| 4АС112M4У3 | 2.0 | 2.2 | 5.6 | 6.7 | 77.5 | 0.84 | 5.6 | 79.0 | 0.83 | 5.0 | 80.0 | 0.81 | 4.2 | 81.0 | 0.78 |
| 4АС132S4У3 | 2.0 | 2.2 | 6.9 | 9.5 | 82.0 | 0.85 | 8.5 | 82.5 | 0.85 | 7.5 | 83.5 | 0.83 | 7.1 | 84.0 | 0.81 |
| 4АС132M4У3 | 2.0 | 2.2 | 6.1 | 14.0 | 83.0 | 0.86 | 11.8 | 84.0 | 0.85 | 10.5 | 84.5 | 0.83 | 9.0 | 85.0 | 0.81 |
| 4АС160S4У3 | 2.0 | 2.2 | 6.1 | 19.0 | 83.5 | 0.86 | 17.0 | 84.5 | 0.86 | 15.0 | 85.5 | 0.85 | 13.0 | 86.0 | 0.784 |
| 4АС160M4У3 | 2.0 | 2.2 | 5.3 | 23.0 | 86.0 | 0,86 | 20.0 | 87.0 | 0.87 | 18.5 | 87.5 | 0.87 | 17.0 | 88.0 | 0.86 |
| 4АС180S4У3 | 2.0 | 2.2 | 5.7 | 24.0 | 84.5 | 0.87 | 21.0 | 86.0 | 0.92 | 20.0 | 86.5 | 0.92 | 19.0 | 87.0 | 0.92 |
| 4АС180M4У3 | 2.0 | 2.2 | 4.4 | 30.0 | 87.0 | 0.93 | 26.5 | 88.5 | 0.91 | 25.0 | 89.0 | 0.91 | 24.0 | 89.5 | 0.91 |
| 4АС200M4У3 | 2.0 | 2.2 | 5.7 | 35.0 | 87.0 | 0.92 | 31.5 | 87.5 | 0.92 | 28.0 | 88.0 | 0.92 | 26.0 | 88.0 | 0.92 |
| 4АС200L4У3 | 2.0 | 2.2 | 5.8 | 47.0 | 88.0 | 0.93 | 40.0 | 89.0 | 0.93 | 37.0 | 89.5 | 0.93 | 35.0 | 90.0 | 0.93 |
| 4АС225M4У3 | 2.0 | 2.2 | 5.8 | 55.0 | 87.0 | 0.94 | 50.0 | 87.5 | 0.92 | 45.0 | 88.0 | 0.92 | 40.0 | 88.5 | 0.92 |
| 4АС250S4У3 | 2.0 | 2.2 | 6.3 | 43.0 | 87.0 | 0.93 | 56.0 | 87.5 | 0.92 | 53.0 | 88.0 | 0.92 | 50.0 | 88.0 | 0.92 |
| 4АС250M4У3 | 2.0 | 2.2 | 6.4 | 71.0 | 86.5 | 0.93 | 63.0 | 87.0 | 0.93 | 60.0 | 87.0 | 0.93 | 56.0 | 87.5 | 0.93 |
| 4АС71A6У3 | 2.0 | 2.1 | 10.4 | 0.4 | 62.5 | 0.94 | 0.4 | 62.0 | 0.70 | 0.4 | 62.5 | 0.70 | 0.4 | 62.5 | 0.70 |
| 4АС71B6У3 | 2.0 | 2.1 | 10.2 | 0.65 | 65.0 | 0.70 | 0.63 | 65.0 | 0.70 | 0.65 | 65.0 | 0.70 | 0.5 | 63.5 | 0.62 |
| 4АС980A6У3 | 2.0 | 2.1 | 7.0 | 0.9 | 61.0 | 0.70 | 0.8 | 61.0 | 0.68 | 0.7 | 61.0 | 0.64 | 0.5 | 60.0 | 0.51 |
| 4АС80B6У3 | 2.0 | 2.1 | 7.8 | 1.3 | 65.6 | 0.72 | 1.2 | 66.5 | 0.73 | 1.1 | 67.5 | 0.71 | 0.8 | 69.0 | 0.64 |
| 4АС90L6У3 | 1.9 | 2.1 | 6.2 | 1.8 | 70.0 | 0.75 | 1.7 | 71.0 | 0.72 | 1.3 | 71.5 | 0.65 | 1.1 | 72.0 | 0.60 |
| 4АС100L6У3 | 1.9 | 2.1 | 5.3 | 2.9 | 74.0 | 0.74 | 2.6 | 75.0 | 0.76 | 2.2 | 76.0 | 0.72 | 1.8 | 76.5 | 0.67 |
Задача 6.2 По каталогу (см. задачу 6.1)выбрать асинхронный двигатель для работы вентилятора, если известно: Производительность вентилятора Q, м3/час; КПД вентилятора ηв,%; частота вращения двигателя n, об/ мин, давление p, Па.
| вариант | Q, м3/час | ηв,%; | n, об/ мин | p, Па | вариант | Q, м3/час | ηв,%; | n, об/ мин | p, Па |
Задача 6.3 Определить наибольшую эквивалентную мощность асинхронного двигателя, если известно: расчетная продолжительность включения ПВр, %; стандартная продолжительность включения ПВст,%; номинальная мощность двигателя P ном,кВт
| вариант | ПВр, %; | ПВст,%; | P ном, кВт | вариант | ПВр, %; | ПВст,%; | P ном, кВт |
| 0,09 | |||||||
| 0,12 | |||||||
| 0,18 | 2,2 | ||||||
| 0,25 | 0,09 | ||||||
| 0,37 | 0,12 | ||||||
| 0,55 | 0,18 | ||||||
| 0,75 | 0,25 | ||||||
| 1,1 | 1,1 | ||||||
| 1,5 | 1,5 | ||||||
| 2,2 | 0,25 |
Задача 6.4 Для подъемного механизма, работающего в циклическом режиме известно: КПД передачи ηп,%; радиус барабана Rб, м номинальная скорость вращения кранового ДПТ n, об/ мин;, скорость подъема груза vп, и скорость спуска крюка v с, м/с; масса груза, m кг; момент инерции якоря двигателя J, кг·м2; высота подъема h,м. Цикл работы состоит из подъема груза и спуска пустого крюка. Построить нагрузочные диаграммы и тахограмму движения.
| вариант | ηп, % | R б, м | n, об/ мин | v п, м/с | v с, м/с | m кг | J, кг·м2 | h, м |
| 0,3 | 0,2 | |||||||
| 0,3 | 1,2 | 0,22 | ||||||
| 0,35 | 1,3 | 0,23 | ||||||
| 0,35 | 1,4 | 2,5 | 0,18 | |||||
| 0,25 | 1,5 | 2,5 | 0,19 | |||||
| 0,25 | 1,6 | 2,5 | 0,2 | |||||
| 0,2 | 1,7 | 2,8 | 0,21 | |||||
| 0,25 | 1,8 | 2,8 | 0,2 | |||||
| 0,4 | 1,9 | 2,8 | 0,22 | |||||
| 0,3 | 0,23 | |||||||
| 0,3 | 0,18 | |||||||
| 0,35 | 1,2 | 0,19 | ||||||
| 0,35 | 1,3 | 0,2 | ||||||
| 0,25 | 1,4 | 0,21 | ||||||
| 0,25 | 1,5 | 3,5 | 0,2 | |||||
| 0,2 | 1,6 | 3,5 | 0,22 | |||||
| 0,25 | 1,7 | 3,5 | 0,23 | |||||
| 0,4 | 1,8 | 3,5 | 0,18 | |||||
| 0,3 | 1,9 | 3,5 | 0,19 | |||||
| 0,3 | 3,5 | 0,2 |
Задача 6.5 Для ДПТ независимого возбуждения, работающего в циклическом режиме построить нагрузочную диаграмму и определить мощность двигателя по условиям нагрева, если известно: M 1, M 2, M 3, M 4,  - моменты нагрузки на валу для соответствующих участков графика нагрузки, t 1, t 2, t
- моменты нагрузки на валу для соответствующих участков графика нагрузки, t 1, t 2, t