М..№2 Консервативные и неконс силы. З сохр эн в мех
Консервативные силы – силы, работа которых не зависит от формы траектории по которой движется тело и определяется в начальной и конечной точках траектории; работа этих сил по замкнутому контуру = 0 Диссипатиыные силы – силы, работа которых зависит от формы траектории по кторой движется тело. Полная механическая энергия тела, т. е. сумма кинетической и потенциальной энергий, остается при его движении под действием консервативных сил неизменной, т. е. сохраняется. Она может лишь переходить в эквивалентных количествах из одного вида (энергии движения) в другой (энергию взаимо действия) и наоборот. Это утверждение и представляет собой суть
закона сохранения энергии замкнутой консервативной механической системы (ЗСМЭ)
Энергия. Виды механической энергии. Кинетическая энергия. Вывод формулы кинетической энергии.
Энергия – физическая клоичественнная вел-на, характеризующая движение и взаимодействие материй. (яднрная, мех-я, тепл-я, атомная, эл.магнитная)
Потенциальная энергия – мех энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Кинетическая энергия механической системы – это энергия механического движения этой системы.
Кинетическая энергия – энергия упорядоченного движения тела.
Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который прошло тело за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dT тела dA=dT. Используя закон Ньютона F =m(d v /dt) и уможая обе части равенства на перемещение d r, получим
F d r =m(d v /dt)d r = dA
Т.к. v =d r /dt то dA=m v d v = mv d v = d T,
откуда T= int(0-v)(mv d v)= mv 2/2
T= mv 2/2
Р = m u; Ек = mu2/2 = m2u2/2m = Р2/2m.
Итак, Ек = Р2/2m
Система материальных точек. Центр масс. Движение центра масс замкнутой системы.
При поступательном движении системы материальных точек /твёрдого тела/ все точки системы движутся с одинаковыми мгновенными линейными скоростями и ускорениями,
и движение всей системы /тела/ эквивалентно движению любой её точки. Обычно в качестве точки, моделирующей движе ние всей системы, выбирается точка С, называемая центром масс системы. Она задаётся радиусом - вектором r С, определяемым через радиус - векторы r i материальных точек системы, об ладающих массами mi, следующим выражением:
r С = Smi r i/М, где М = Smi - полная масса системы из N точек.
Скорость u с движения центра масс равна:
u с = d r С/dt = d/dt(Smid ri /М) = Smi u i/М = Р С/М,
где Р С = Smi u i - полный импульс системы.
Закон изменения скорости центрамасс системы (или уравнение движения центра масс) - естественное обобщение основ ного уравнения динамики точки на систему частиц, твёрдое тело:
а с = d uс /dt = (1/М)×d Р С/dt = F S внеш/М –
- центр масс механической системы движется как материа льная точка, масса которой равна массе М системы, под действием результирующей F S внеш внешних сил, приложенных к системе. Эта теорема о движении центра масс показывает, что при поступательном движении твердого тела можно не учитывать его размеры и форму, т.к. все его точки движутся идентично. Если результирующая внешних сил равна нулю: F S внеш=0, то центр масс системы точек движется с постоянной скоростью, сохраняя состояние своего движения, в частном случае – покоя. Внутренние взаимодействия не меняют положения центра масс; это утверждение часто используется при решении задач механики замкнутой системы тел.
Закон сохранения импульса
Рассмотрим систему из n материальных точек. Запишем второй закон Ньютона для i - ой точки: d Рi /dt = F i. Результирующую силу F i, действующую на i - ую точку системы представим в виде суммы внешних и внутренних сил: F i= F i внеш + S F ik , где F ik – внутренняя сила, дейст вующая на i - ую точку системы со стороны ее k – ой точки. Полученное равенство d Рi /dt = F i внеш + S F ik, выражающее второй закон Ньютона для i - ой точки системы, просуммируем по всем ее n точкам: Sd Рi /dt = S F i внеш + SS F ik. По третьему закону Ньютона силы воздействия i - ой и k – ой точек друг на друга равны по величине и противоположны по направлению, то есть F ik = - F ki. Поэтому при суммировании внутренних сил по всем точкам системы они взаимно скомпенсируют друга, так что SS F ik = 0. Тогда второй закон Ньютона для системы материальных точек запишется в виде: Sd Рi /dt = d/dtS Рi = d Р S/dt = S F i внеш = F S внеш. Или окончательно d Р S/dt = F S внеш
Если система замкнута, то есть результирующая действующих на нее внешних сил равная нулю: F S внеш = 0, то d Р S/dt = 0, откуда следует Р S = S Рi = const – закон сохранения импульса замкнутой системы материальных точек.
Сохране ние импульса - величины векторной - означает сохранение и любой его состав ляющей, проекции на любую ось, любое направление в пространстве. В конкретных задачах
динамики векторный закон сохранения импульса за писывают в скалярной форме, проецируяего на соответствующие направления.
Закон сохранения импульса является эффективным средством, методом реше ния основ ной задачи механики (ОЗМ), т. к. он выражает собой взаимосвязь мер (коли честв) движения взаимодействующих тел. Особенно плодотворнымего применение оказывается для кратковре менных взаимодействий типа удара, взрыва-разрыва, выброса тел, где труд но задать характер сил, то есть использовать под ход к решению ОЗМ с непосредственным использованием законов Ньютона. Зная, например, импульсы Р 1 и Р 2 двух тел до удара и импульс Р i¢ одного из тел после удара, можно, пользуясь законом сохранения импульса, рассчитать импульс другого тела после удара.
Причины изменения механической энергии системы. Полной механической энергией системы тел называется сумма кинетической и потенциальной энергий:
E = Eк + Eп.
Какие причины могут изменить полную механическую энергию?
Полная механическая энергия может изменяться в результате следующих причин:
| 1) внешнего воздействия на систему (толчки, приближение из вне магнита, заряженных тел и т.п.); | |
| 2)наличия внутренних неконсервативных сил. Например, силы сопротивления вызывают уменьшение механической энергии системы "шар, Земля, воздух, нить". |
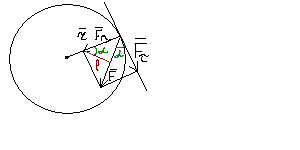
Рассмотрим систему тел, в которой действуют следующие силы:
f кс - внутренние консервативные силы; f нкс - внутренние неконсервативные силы; F внеш.с. - внешние силы.
На рис. 8.8 изображены силы, действующие на 1 тело системы. Изменение кинетической энергии системы равно суммарной работе всех вышеперечисленных сил, действующих на тела этой системы:
DEк = Aкс+ Aнкс+ Aвнеш.с. (1)
Изменение потенциальной энергии системы, взятое с обратным знаком, равно работе внутренних консервативных сил:- DEп = Aкс (2)
Очевидно, что изменение полной механической энергии равно: DE = DEп + DEк (3)
Из уравнений (1-3) получим, что изменение полной механической энергии системы равно работе всех внешних сил и внутренних неконсервативных сил: DE = Aвнеш.с.+ Aнкс (4)
Выражение (4) представляет из себя закон изменения полной механической энергии системы тел. Оно иллюстрирует физический смысл работы как меры изменения механической энергии системы.
Пользуясь этим законом, можно определить характер движения тел, не рассматривая силы и не решая системы уравнений, записанных на основе 2 закона Ньютона.
М. №3 Вращат движ. Мом имп и мом силы. Мом инерции. Теорема Штейнера. З сохр мом импульса. Осн з динамики вращат движ. Эн вращающего тела.
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движения. Поступательное движение – это движение при котором любая прямая жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение- это движение, при котором все точки тела движутся по окружности, центры которой лежат на одной и той же кривой, называемой осью вращения.
 Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку приложения силы, на силу F.
Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку приложения силы, на силу F.
 ,
,  ,
,  }
}  .
.  – плечо силы (
– плечо силы ( – угловое ускорение)
– угловое ускорение)
 – момент инерции точки.
– момент инерции точки.  ,
,  момент силы.
момент силы.  - основной закон динамики вращательного движения. B=
- основной закон динамики вращательного движения. B=  - угловое ускорение пропорционально моменту приложенных сил и обратно пропорционально моменту инерции.
- угловое ускорение пропорционально моменту приложенных сил и обратно пропорционально моменту инерции.
Моментом импульса материальной точки относительно неподвижной точки называется физическая величина, определяемая векторным произведением: L=[rp]=[r,mv]
Моментом инерции системы относительно данной оси называется физическая величина равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси: 
Теорема Штейнера: момент инерции тела J относительно произвольной оси равен моменту его инерции  относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы тела на квадрат расстояния между осями:
относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы тела на квадрат расстояния между осями: 
В замкнутой системе момент внешних сил М=0 и  , откуда L=const. Это и есть закон сохранения мом импульса: момент импульса замкнутой системы сохраняется, т.е не изменяется с течением времени.
, откуда L=const. Это и есть закон сохранения мом импульса: момент импульса замкнутой системы сохраняется, т.е не изменяется с течением времени.
кинетическая энергия тела, движущегося произвольным образом, равна сумме кинетических энергий всех n материальных точек па которые это тело можно разбить:

Если тело вращается вокруг неподвижной оси с угловой скоростью  , то линейная скорость i-ой точки равна
, то линейная скорость i-ой точки равна  , где
, где  - расстояние от этой точки до оси вращения. Следовательно:
- расстояние от этой точки до оси вращения. Следовательно: 
где  - момент инерции тела относительно оси вращения.
- момент инерции тела относительно оси вращения.
Сравнительная таблица
| Поступательное движение | Вращательное движение |
 (путь) (путь)
|  - угол - угол
|

|  – углов скорость – углов скорость
|

|  – угл ускорение – угл ускорение
|
| m | – момент инерции
|
| F |  момент силы момент силы
|
| mv | L=[rp] – момент импульса |

| 

|
М. №4 Упругие силы. Виды упругих деформаций, закон Гука для различных деформаций, модули упругости.
Деформация называется упругой, если после прекращения действия внешних сил тело принимает первоначальные размеры и форму. Деформации, которые сохраняются в теле после прекращения действия внешних сил, называются пластическими (или остаточными). Деформации реального тела всегда пластические, так как они после прекращения действия внешних сил никогда полностью не исчезают.
Физическая величина, определяемая модулем силы упругости, действующей на единицу площади поперечного сечения тела, называется напряжением: 
Если сила направлена по нормали к поверхности, напряжение называется нормальным, если же по касательной к поверхности — тангенциальным.
Количественной мерой, характеризующей степень деформации, испытываемой телом, является его относительная деформация. Так, относительное изменение длины стержня (продольная деформация): 
виды деформаций (растяжение или сжатие, сдвиг, изгиб, кручение)
Английский физик Р.Гук (1635 —1703) экспериментально установил, что для малых деформаций относительное удлинение е и напряжение а пропорциональны друг другу: 
где Е — коэффициент пропорциональности, называемый модулем Юнга. Модуль Юнга определяется напряжением, вызывающим относительное удлинение, равное единице. 
где к — коэффициент упругости.
 Формула это закон Гука, согласно которому удлинение стержня при упругой деформации пропорционально действующей на стержень силе.
Формула это закон Гука, согласно которому удлинение стержня при упругой деформации пропорционально действующей на стержень силе.
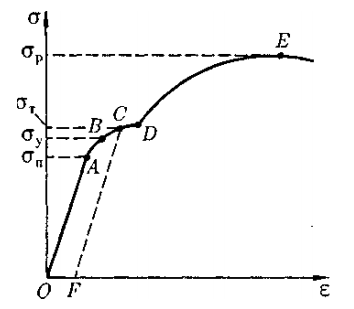
линейная зависимость  , установленная Гуком, выполняется лишь в очень узких пределах до так называемого предела пропорциональности (ст,,). При дальнейшем увеличении напряжения деформация еще упругая (хотя зависимость
, установленная Гуком, выполняется лишь в очень узких пределах до так называемого предела пропорциональности (ст,,). При дальнейшем увеличении напряжения деформация еще упругая (хотя зависимость  уже нелинейна) и до предела упругости (
уже нелинейна) и до предела упругости ( ) остаточные деформации не возникают.
) остаточные деформации не возникают.
За пределом упругости в теле возникают остаточные деформации и график, описывающий возвращение тела в первоначальное состояние после прекращения действия силы, изобразится не кривой ВО, а прямой CF, параллельной О А. Напряжение, при котором появляется заметная остаточная деформация («0,2 %), называется пределом текучести ( ) — точка С на кривой. В области CD деформация возрастает без увеличения напряжения, т.е. тело как бы «течет». Эта область называется областью текучести (или областью пластических деформаций).
) — точка С на кривой. В области CD деформация возрастает без увеличения напряжения, т.е. тело как бы «течет». Эта область называется областью текучести (или областью пластических деформаций).
Материалы, для которых область текучести значительна, называются вязкими, для которых же она практически отсутствует — хрупкими. При дальнейшем растяжении (за точку D) происходит разрушение тела. Максимальное напряжение, возникающее в теле до разрушения, называется пределом прочности ( ).
).