Курсовая работа
по дисциплине: Робототехника
тема: Проектирование манипулятора
Выполнил
cт. гр. EI – 972 Сороков А.С.
Проверил
доцент Мардаре И.А.
Кишинёв 2001
Содержание
Задание
Введение 4
1. Кинематическая схема манипулятора 6
2. Описание последовательности движений звеньев
манипулятора 7
3. Форма, размеры и расположение рабочей зоны 8
4. Упрощённая конструкция манипулятора со
связанными системами координат 11
5. Результирующие однородные матрицы преобразований
для каждой точки позиционирования 12
6. Принципиальная электрическая схема устройства управления 16
7. Сборочный чертёж манипулятора в прямоугольной
правосторонней системе координат 17
Заключение 18
Литература 19
CPAE EI 2102 972 17 ПЗ
Манипулятор
UTM FRE
EI - 972

Кинематическая схема манипулятора
На рисунке 1 представлена кинематическая схема манипулятора выполненная в правосторонней прямоугольной системе координат.
Индекс подвижности манипулятора: Пх – Вz - By
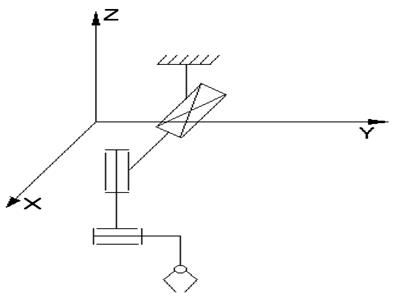
Рис. 1 Кинематическая схема манипулятора

Описание последовательности движений звеньев манипулятора
1. В исходном состоянии рабочий орган манипулятора находится в первой точке позиционирования, в начале системы координат. Ни одно из звеньев не совершало движения.
2. Звено один совершает перемещение, в результате чего рабочий орган перемещается из точки один в точку два.
3. Второе звено совершает перемещение, в результате чего рабочий орган поворачивается на 180° и подходит к точке три.
4. Звено один совершает перемещение, при этом рабочий орган перемещается в точку четыре.
5. Второе звено совершает перемещение, в следствии чего, рабочий орган поворачивается на 180° и возвращается в точку один.

Форма, размеры и расположение рабочей зоны
Для определения параметров рабочей зоны необходимо рассчитать геометрические размеры манипулятора.
Следовательно, необходимо определить размеры цилиндра поступательного перемещения, а также размеры цилиндра вращательного перемещения.
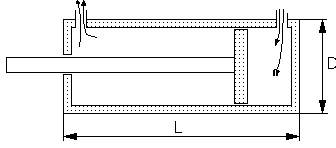 |
Сначала определим размеры цилиндра поступательного перемещения:
Рис.2 Цилиндр поступательной подвижности
Определим длину цилиндра L по формуле:
 , где
, где
Н – заданное поступательное перемещение
1,1 – взято из конструктивных соображений
Определим диаметр цилиндра D по формуле:


 |
Определим размеры цилиндра вращательных подвижностей:
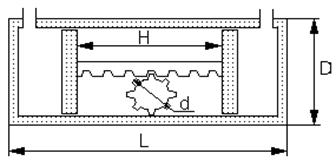
Рис.3 Цилиндр вращательной подвижности
Определим длину цилиндра L по формуле:
 , где
, где
Н – величина поступательного перемещения для поворота на необходимый угол, которая определяется по формуле Н = pd для поворота на угол 360°
d – диаметр вала вращения (4см)
0,05 – запас на поршни и другие конструктивные элементы
Так как имеется две вращательные подвижности, то была рассчитана длина каждой подвижности, которые равны:

Определим диаметр цилиндра D по формуле:
 , где
, где
2,5 – коэффициент, учитывающий диаметр вала вращения и тодлщину рейки
1,1 – из конструктивных соображений
Результаты определения диаметра:


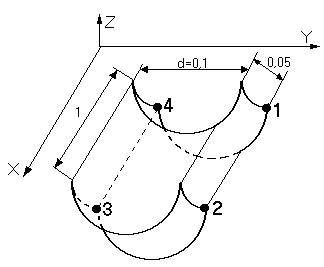 |
Рис.4 Параметры рабочей зоны
На рисунке 4 представлена рабочая зона рабочего органа. Из данного рисунка видно, что четыре точки позиционирования рабочего органа отмечены цифрами 1,2,3,4.

Упрощённая конструкция манипулятора со связанными системами координат
Рис.5 Упрощённая конструкция манипулятора со связанными системами координат
Связанные системы координаты расставлены в соответствии с представлениями Денавита – Хартенберга.
Система [X0,Y0,Z0] – связанная система координат 1-го звена
[X1,Y1,Z1] – связанная система координат 2-го звена
[X2,Y2,Z2] – связанная система координат 3-го звена
[XР,YР,ZР] – связанная система координат рабочего органа
