Федеральное государственное бюджетное образовательное учреждение
Высшего образования
«Казанский национальный исследовательский технологический университет»
(ФГБОУ ВО КНИТУ)
Кафедра «Систем автоматизации и управления технологическими процессами»
Курсовая работа по дисциплине
«Теория автоматического управления»
на тему:
«Расчет и исследование динамики автоматической системы регулирования»
Выполнила: студентка группы 8161-32
Ильясова Г.С.
Проверила: Усманова А.А.
Казань, 2019
Оглавление
1. Описание АСР: функциональная и структурная схема системы, передаточные функции, системы по каналам регулирования и возмущения. 3
2. Определение параметров передаточной функции объекта по каналу регулирования путем обработки экспериментальной переходной функции. Проверка адекватности полученной модели. 4
3. Построение АФХ объекта по каналам регулирования и возмущающего воздействий. 6
4 Построение в плоскости параметров настройки ПИ- регулятора. Границы области устойчивости и границы области заданного запаса устойчивости по критерию m=0,336. 9
5. Определение оптимальных настроек П, И, ПИ, ПИД-регуляторов. 11
6. Построение графиков переходных процессов АСР с ПИ, ПИД регуляторами: при ступенчатом воздействии по каналу регулированияпри ступенчатом воздействии по каналу возмущения. 14
7. Анализ качества переходных процессов в системе с разными законами регулирования. 16
8. Анализ качества переходных процессов в системе с разными законами регулирования. 24
Описание АСР: функциональная и структурная схема системы, передаточные функции, системы по каналам регулирования и возмущения
В данной курсовой работе приведен расчет одноконтурной АСР регулирование давления.
Исходные данные:
Канал регулирующего воздействия (изменения задания регулятору на 1 Мпа).
Кривая разгона объекта приведена в таблице 1.1
Таблица 1.1
| T, min | |||||||||||
| 0,℃ | 25,4 | 26,6 | 29,2 | 30,3 | 31,5 | 32,4 | 33,2 | 33,3 | 33,3 |
Канал возмущающего воздействия (изменения расхода продукта на 20% хода регулирующего органа) – передаточная функция объекта в виде апериодического звена первого порядка.

Определение параметров передаточной функции объекта по каналу регулирования путем обработки экспериментальной переходной функции. Проверка адекватности полученной модели
Функциональная схема приведена на рисунке 2.1.

Рисунок 2.1 – Функциональная схема объекта регулирования
Структурные схемы передаточной функции по каналу регулирования и по каналу возмущения представлены на рисунках 2.2 и 2.3.
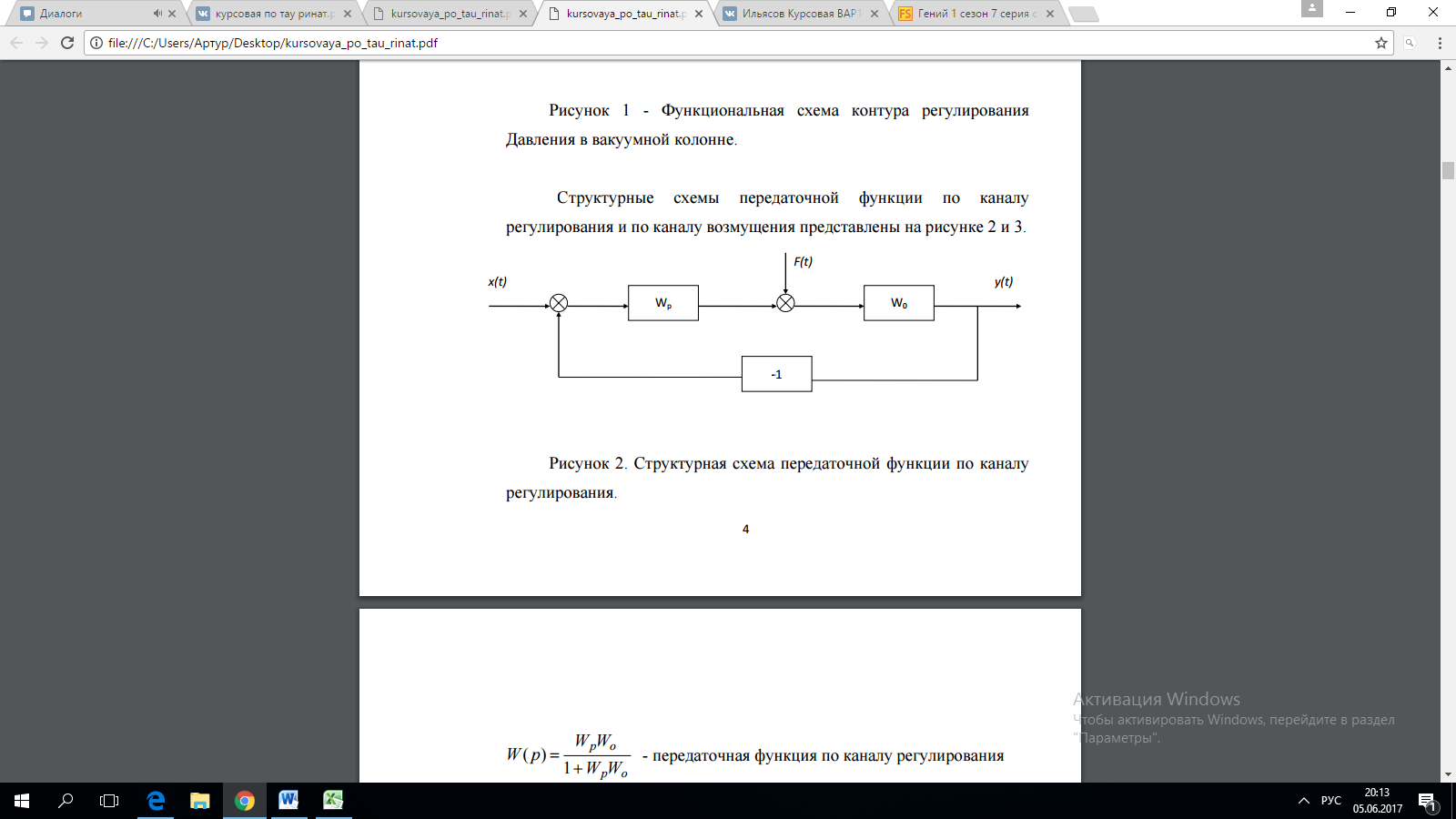
Рисунок 2.2 – Структурная схема передаточной функции по каналу регулирования
 - передаточная функция по каналу регулирования
- передаточная функция по каналу регулирования
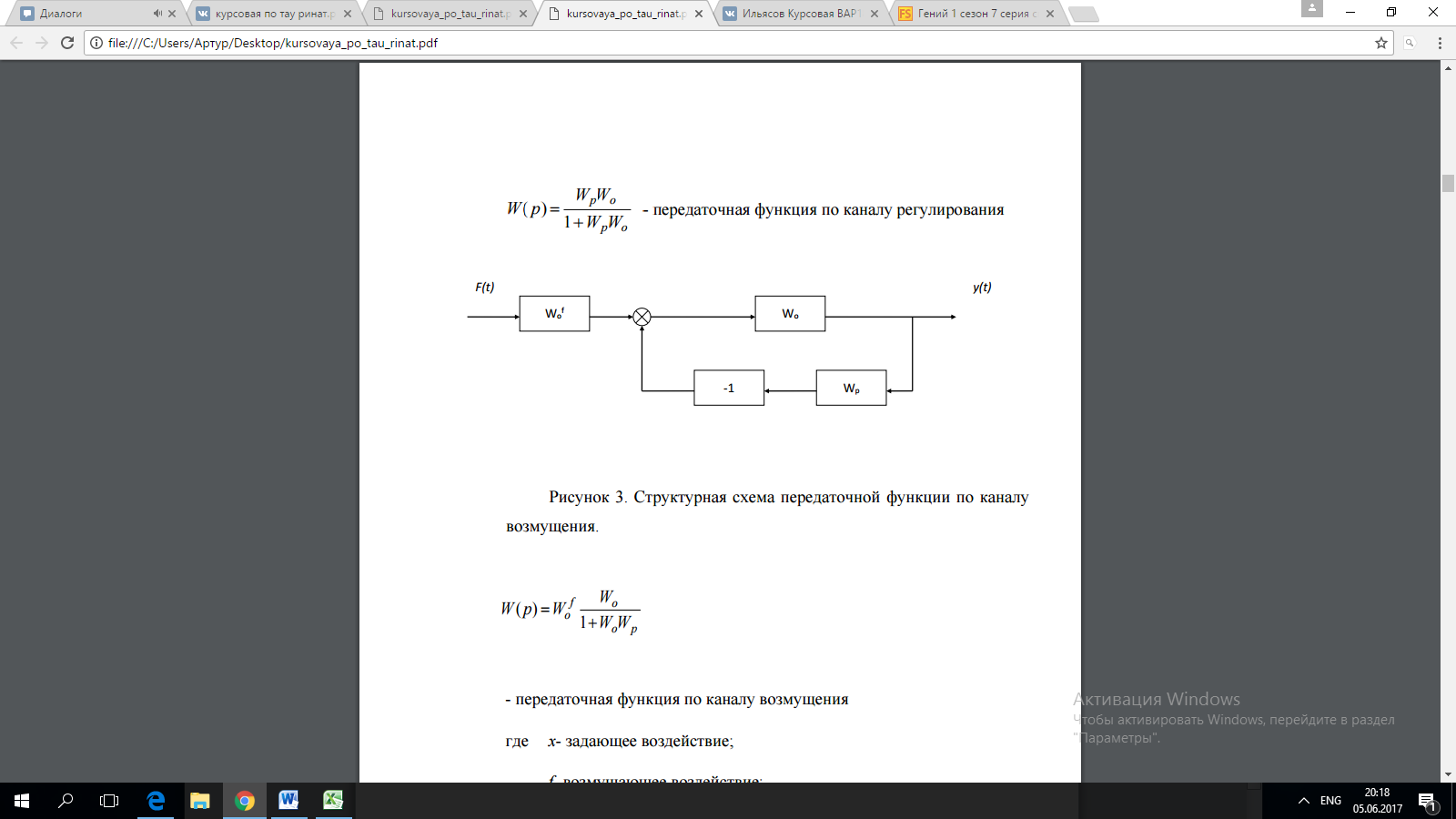
Рисунок 2.3 – Структурная схема передаточной функции по каналу возмущения
 - передаточная функция по каналу возмущения
- передаточная функция по каналу возмущения
где:
 - задающее воздействие;
- задающее воздействие;
 - возмущающее воздействие;
- возмущающее воздействие;
 - управляемая величина;
- управляемая величина;
 - передаточная функция объекта по каналу регулирования;
- передаточная функция объекта по каналу регулирования;
 - передаточная функция регулятора;
- передаточная функция регулятора;
 - передаточная функция объекта по возмущающему воздействию.
- передаточная функция объекта по возмущающему воздействию.
Построение АФХ объекта по каналам регулирования и возмущающего воздействий
Построение математической модели линейной системы по экспериментальной переходной функции производится в следующем порядке:
1. Установление вида передаточной функции модели на основание форм переходной функции, и в зависимости от физ. свойств исследуемой системы;
2. Определяются значения коэффициентов передаточной функции из условия наилучшего приближения модели и объекта;
3. Производится оценка точности аппроксимации.
Разгонная характеристика (кривая разгона) представляет собой график изменения регулируемой величины во времени в результате скачкообразного возмущения, приложенного к объекту. Наибольший практический интерес представляет исследование динамических свойств, при возмущениях со стороны регулирующего воздействия. Снимают кривую разгона следующим образом. Объект приводят в равновесное состояние, при котором все входные и выходные величины постоянны. Затем быстрым перемещением регулирующего органа (клапана, заслонки, регулятора мощности и т.д.) вносят скачкообразное возмущение. После этого записывают периодически результаты измерения выходной величины до тех пор, пока выходная величина не примет нового установившегося значения или пока не установится постоянная скорость ее изменения. По точкам отсчета строят кривую в координатах: выходная величина – время, которая и является кривой разгона. Для снятия кривой разгона удобно использовать самопишущие регистрирующие приборы с ленточной картограммой. Вид кривой разгона, таким образом, полностью определяется видом передаточной функции объекта. И наоборот, если имеется экспериментально снятая кривая разгона, по ней можно определить выражение для передаточной функции. В настоящее время используют следующие методы определения функции по кривой разгона: - метод площадей; - метод дополнительных членов; - метод последовательного логарифмирования; - аппроксимация дифференциальными уравнениями; - аппроксимация суммой элементарных звеньев; - графический метод. В соответствии с методом площадей определим коэффициенты передаточной функции по компьютерной программе TAU.exe, выбрав шаг ∆t=0,05 и произведя нормировку в соответствии со следующей формулой:

Получим следующие значения, представленные в таблице 2.1.
Таблица 2.1 – Значения полученные по программе TAU.exe
| t, мин | 0℃ | y(t) |
| 25,4 | 0,0481 | |
| 26,6 | 0,192 | |
| 29,2 | 0,506 | |
| 30,3 | 0,638 | |
| 31,5 | 0,783 | |
| 32,4 | 0,891 | |
| 0,963 | ||
| 33,2 | 0,987 | |
| 33,3 | ||
| 33,3 |
Коэффициенты передаточной функции, которые нам рассчитала программа: 
В соответствии с этим выбираем передаточную функцию вида:

В таблице 2.2 приведена расчетная переходная функция модели с отклонениями.
Таблица 2.2 - Расчетная переходная функция модели с отклонением
| t, мин | 0℃ | Расчётные значения | Нормированные значения | Отклонение |
| 25,4 | 0,163 | 0,481 | -0,318 | |
| 26,6 | 0,198 | 0,192 | -0,030 | |
| 29,2 | 0,384 | 0,506 | 0,006 | |
| 30,3 | 0,588 | 0,638 | -0,05 | |
| 31,5 | 0,777 | 0,783 | -0,006 | |
| 32,4 | 0,926 | 0,891 | 0,035 | |
| 0,975 | 0,963 | 0,012 | ||
| 33,2 | 1,023 | 0,987 | 0,036 | |
| 33,3 | 1,079 | 0,079 | ||
| 33,3 | 1,079 | 0,079 |
По данным из таблицы 2.2 были построены кривые разгона модели и объекта, которые представлены на рисунке 2.1.

Рисунок 2.1 - Кривые разгона объекта и модели
Вывод: Исходя из табличных данных, видно, что наибольшее отклонение в -0,318 между экспериментальной моделью и машинной моделью, не превышает значение в 0,08, а следовательно выбранная модель адекватна.
4.Построение в плоскости параметров настройки ПИ- регулятора. Границы области устойчивости и границы области заданного запаса устойчивости по критерию m=0,336
По данным программы TAU.exe найдем значения модуля и фазы для постройки АФХ (годограф).
Исходные данные для программы: k=8,3/5=1,66
а1=4,48 а2=8,490 а3=13,201
m=0,336
Частота: - начальное значение – 0,3;
- конечное значение – 0,91
- шаг – 1.
После внесения параметров в программу были получены следующие данные: Таблица 3
| Частота | Модуль | Фаза |
| 0,01 | 1,676265338 | -2,570 |
| 0,11 | 1,816922484 | -28,246 |
| 0,21 | 1,96E00 | -52,454 |
| 0,31 | 2,325264218 | -75,933 |
| 0,41 | 3,594342621 | -111,602 |
| 0,51 | 3,325388588 | -201,867 |
| 0,61 | 1,198153571 | -241,807 |
| 0,71 | 0,586639164 | -255,840 |
| 0,81 | 0,342280804 | -263,790 |
| 0,91 | 0,220675981 | -269,238 |
На основании полученных данных построен годограф
График 2. Годограф
5.Определение оптимальных настроек П, И, ПИ, ПИД-регуляторов.
Регулятор — это устройство, которое управляет величиной контролируемого параметра. Регуляторы используются в системах автоматического регулирования. Они следят за отклонением контролируемого параметра от заданного значения и формируют управляющие сигналы для минимизации этого отклонения.
Параметры настройки регуляторов должны быть выбраны такими, чтобы в замкнутой автоматизированной системе регулирования (АСР) был обеспечен заданный запас устойчивости; при этом выбранный показатель качества регулирования должен быть не хуже требуемого (или должен иметь экстремальное значение).
Поскольку в теории автоматического регулирования запас устойчивости может быть оценен по-разному, а также используются различные показатели качества регулирования, в инженерных расчетах применяются несколько методов определения оптимальных параметров настройки регуляторов.
В нашем случае для определения границы областей заданного запаса устойчивости по критерию m=0,221 воспользуемся программой TAU.exe
Результатом работы программы будет задаваемый интервал изменения частоты w с задаваемым шагом дискретизации на основе которых строятся границы области устойчивости и границы области заданного запаса устойчивости по критерию m=0,336. А также соответствующей этой частоте модуль, фаза, настройки S0, S1.
Для ПИ - регулятора при m=0,336
Таблица 4. Данные коэффициентов настройки при m=0,336
| Частота | S0 | S1 | Частота | S0 | S1 |
| 0,01 | 1,676 | -0,5900511 | -3,22E-02 | 0,133069645 | -3,22E-02 |
| 0,11 | 1,816 | -0,4272747 | 7,19E-03 | 0,137508061 | 7,19E-03 |
| 0,21 | 1,96Е | -0,2213269 | 4,50E-02 | 0,138888476 | 4,50E-02 |
| 0,31 | 2,325 | -0,0123295 | 8,08E-02 | 0,136646008 | 8,08E-02 |
| 0,41 | 3,594 | 0,1595948 | 0,114297 | 0,13018848 | 0,114297 |
| 0,51 | 3,325 | 0,2543264 | 0,145214 | 0,11889630 | 0,145214 |
| 0,61 | 1,198 | 0,2317423 | 0,1732037 | 0,10212257 | 0,17320 |
| 0,71 | 0,586 | 5,17E-02 | 0,1979452 | 7,92E-02 | 0,19794 |
| 0,81 | 0,342 | -0,3258605 | 0,2191174 | 4,94E-02 | 0,2191174 |
| 0,91 | 0,220 | -0,9411229 | 0,2363995 | 1,20E-02 | 0,2363995 |
| 1,01 | 2,81Е | -0,5900511 | |||
| 1,11 | 3,01Е | -0,4272747 | |||
| 1,21 | 8,90Е | -0,2213269 | |||
| 1,31 | 0,135 | -0,0123295 | |||
| 1,41 | 0,111 | 0,1595948 | |||
| 1,51 | -5,99Е | 0,2543264 | |||
| 1,61 | -0,470 | 0,2317423 | |||
| 1,71 | -1,230 | 5,17E-02 | |||
| 1,81 | -2,467 | -0,3258605 | |||
| 1,91 | -4,324 | -0,9411229 |
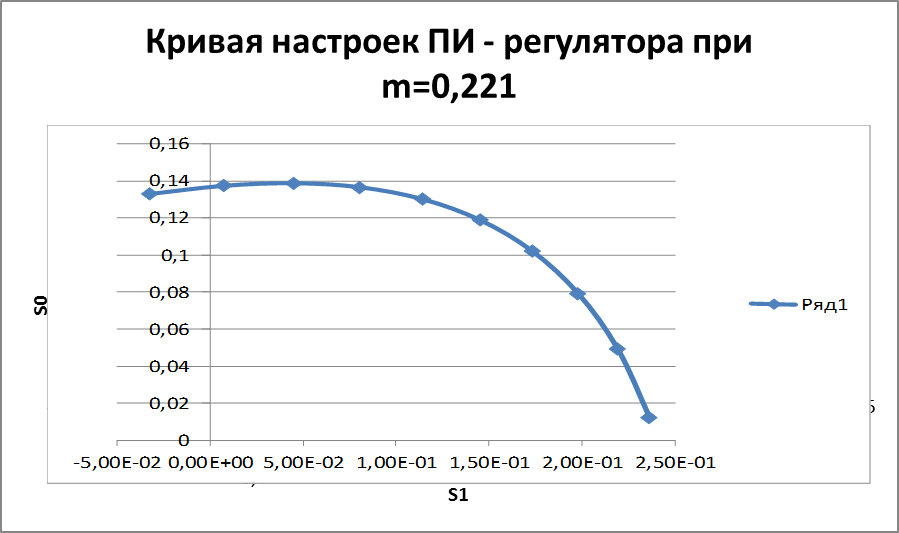
График 3. Кривая настроек регулятора при m=0,336
Оптимальные настройки Пи регулятора: Исходя из данных  =0,372;
=0,372;
 =0,1215721672;
=0,1215721672;  =0,1392545
=0,1392545
Построение графиков переходных процессов АСР с ПИ, ПИД регуляторами: при ступенчатом воздействии по каналу регулированияпри ступенчатом воздействии по каналу возмущения.
Исходные данные:
Расчетный коэффициент K= 1,66
Коэффициенты передаточной функции: а1=4,48, а2=8,490404,а3=13,20181;
Степень колебательности m= 0,336; S2= 0,127;
Вносим данные в программу и получаем следующие значения для ПИД регулятора:
Таблица 5. Определение оптимальных настроек ПИД-регулятора
| Частота | S0 | S1 | Частота | S0 | S1 |
| 0,01 | 0,001 | -1,965 | 0,310 | 0,588 | -0,369 |
| 0,11 | 0,092 | -1,534 | 0,360 | 0,734 | -0,043 |
| 0,21 | 0,305 | -0,989 | 0,410 | 0,869 | 0,286 |
| 0,31 | 0,588 | -0,369 | 0,460 | 0,982 | 0,613 |
| 0,41 | 0,869 | 0,286 | 0,510 | 1,060 | 0,934 |
| 0,51 | 1,060 | 0,934 | 0,560 | 1,090 | 1,243 |
| 0,61 | 1,056 | 1,535 | 0,610 | 1,056 | 1,535 |
| 0,71 | 0,734 | 2,049 | 0,660 | 0,943 | 1,805 |
| 0,81 | -0,045 | 2,435 | 0,710 | 0,734 | 2,049 |
| 0,91 | -1,439 | 2,653 | 0,760 | 0,411 | 2,260 |
| 1,01 | -3,622 | 2,662 | 0,810 | -0,045 | 2,435 |
| 1,11 | -6,785 | 2,422 | |||
| 1,21 | -11,136 | 1,892 | |||
| 1,31 | -16,903 | 1,032 | |||
| 1,41 | -24,328 | -0,198 | |||
| 1,51 | -33,671 | -1,840 | |||
| 1,61 | -45,210 | -3,933 | |||
| 1,71 | -59,241 | -6,518 | |||
| 1,81 | -76,074 | -9,636 | |||
| 1,91 | -96,041 | -13,326 |
По полученным данным была построена кривая настроек ПИД- регулятора, представленная на графике 4.

График 4. Кривая настроек ПИД - регулятора при m=0,336
Оптимальные настройки ПИД регулятора: Исходя из данных =0,612;
=0,5797; =1,2273