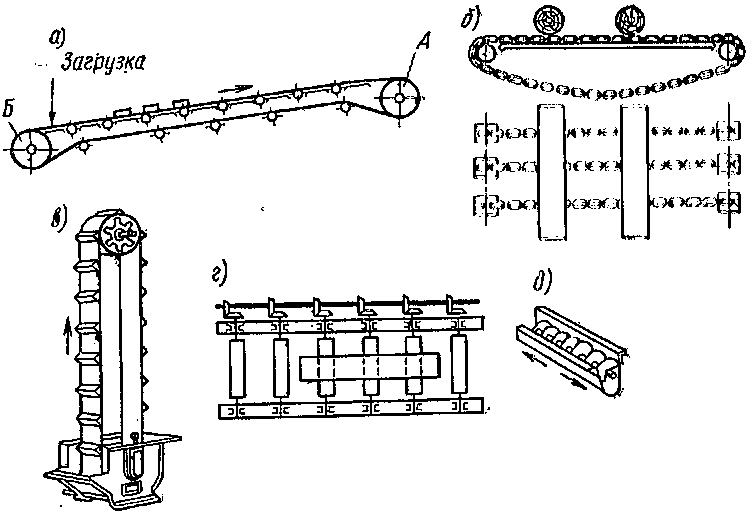
Конвейеры используются на промышленных предприятиях и учреждениях для межоперационного перемещения внутри цехов и между ними различных материалов, заготовок, деталей, а также для удаления отходов производства и транспортировки готовой продукции на склады. По виду рабочего (несущего) органа конвейеры (рис.24) подразделяются на ленточные - а, цепные - б, ковшовые - в, роликовые (рольганги) - г, винтовые (шнековые) – д, подвесные - е.
|

Рис. 24. Общий вид конвейеров.
Особенности электропривода конвейеров.
1. Как правило - отсутствие реверса.
2. При отсутствии специальных требований к точности остановки ленты или другого несущего органа – отсутствие электромеханического и электрического торможения.
3. Продолжительный режим работы.
4. Малое число включений в час.
5. Наличие жестких механических характеристик (постоянство скорости передвижения несущего органа при изменении нагрузки на валу двигателя от нуля при холостом ходе до номинального значения).
6. Возможность возникновения больших статических моментов при пуске (после временной остановки с полностью загруженной лентой или другим несущим органом), а значит необходимость выбора двигателя с большим пусковым моментом.
7. В зависимости от особенностей технологического процесса:
а) ступенчатое регулирование скорости в диапазоне 1:2 ÷ 1:3;
б) плавное регулирование скорости в диапазоне до 1:10 (в сборочных цехах предприятий электронной и другой сложной техники).
8. Работа электрооборудования в неблагоприятных условиях окружающей среды (влага, наличие паров агрессивных жидкостей, запыленность, перепад низких и высоких температур).
9. В случае использования совместно работающих конвейеров – необходимость автоматической блокировки от завалов или от обрыва ленты.
Перечисленным особенностям электропривода полностью отвечают следующие типы электроприводов (систем управления):
1. При отсутствии регулирования скорости – АД КЗР, управляемый магнитным пускателем.
2. При ступенчатом регулировании скорости - двух- и трехскоростные АДКЗР (с переключением пар полюсов), управляемые универсальным переключателем и магнитным пускателем.
3. При ступенчатом регулировании скорости и обеспечении большого пускового момента – АДФР, управляемый универсальным переключателем или контроллером.
4. При плавном регулировании скорости и большом диапазоне – АДКЗР, управляемый тиристорным регулятором напряжения или тиристорным преобразователем частоты.
5. Двигатели постоянного тока используются редко и только на точных ответственных работах, т.к. их стоимость и обслуживание значительно дороже, чем у АД.
СР Тема 4.2. Устройство ленточного конвейера.
На два барабана 2 и 5, покрытых резиной или пластмассой (для лучшего сцепления), натягивается замкнутая прорезиненная лента 1. Правый барабан 2 является ведущим (приводным), он через ременную передачу 3 приводится во вращение электродвигателем 4. Подшипники левого (ведомого) барабана 5 имеют возможность перемещаться в горизонтальном направлении по направляющим 9, что с помощью груза  и отводного шкива 6 обеспечивает предварительное натяжение ленты конвейера.
и отводного шкива 6 обеспечивает предварительное натяжение ленты конвейера.

Рис.25. Кинематическая схема ленточного конвейера.
Вращение ведущего барабана вызывает передвижение ленты в нужном направлении с грузом 8 на расстояние  со скоростью
со скоростью  . Для устранения провисания ленты под действием груза, на всем ее протяжении устанавливается ряд опорных роликов 7, которые свободно вращаются под действием силы трения о ленту.
. Для устранения провисания ленты под действием груза, на всем ее протяжении устанавливается ряд опорных роликов 7, которые свободно вращаются под действием силы трения о ленту.