с использованием программы Mathcad.
Задание: Построить эпюры внутренних изгибающих моментов и поперечных сил, а также эпюру прогибов балки.
Сформируем расчётную конечно-элементную модель балки из трёх конечных элементов (и четырёх узлов):
Количество степеней свободы в каждом узле примем равное двум:
1) возможность перемещаться перпендикулярно оси балки,
2) возможность поворота в плоскости расчётной схемы,
и установим для них следующее правило знаков:
1) вертикальное перемещение (прогиб), положительное направление – вниз,
2) угол поворота, положительное направление – по часовой стрелке.
Таким образом, примем и зададим в программе Mathcad:
- количество степеней свободы одного конечного элемента: Ne: = 4,
- количество степеней свободы всей расчётной модели балки: Ns: = 8.
1. Исходные данные:
Жёсткость балки при изгибе: EI = 100000 (кН∙м2)
Параметры нагрузки: q = 2 (кН/м), Р = 9 (кН), М = 6 (кН∙м),
Длины конечных элементов: L1 = 4 (м), L2 = 2 (м), L3 = 2 (м)
Зададим на Mathcad: EI:= 100000 q: = 2 Р: = 9 М: = 6
Номер первого элемента в каждом массиве, используемом в программе, зададим равным единице:
ORIGIN:= 1
(по умолчанию Mathcad назначил бы номер первого элемента каждого используемого в программе массива равным нулю).
2. Формирование матрицы жёсткости расчётной модели.
Сформируем локальные матрицы жёсткости трёх конечных элементов К1, К2, К3:
Запишем на Mathcad общее выражение матрицы жёсткости балочного конечного элемента с двумя степенями свободы в узле, c изгибной жёсткостью EI и длиной L. Для построения матриц и векторов будем использовать опцию «Матрица» на Панели инструментов Mathcad:
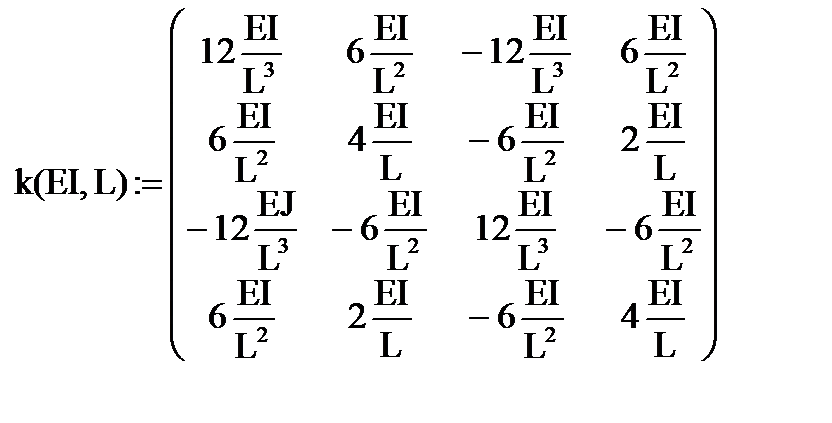
Построим матрицу жёсткости конечного элемента № 1 с изгибной жёсткостьюEI = 100000 и длиной L1 = 4 (для задания степени числа можно пользоваться опцией «Калькулятор» на Панели инструментов Mathcad):
K1:= K(105,L1)
Чтобы увидеть вычисленные элементы матрицы К1, напишем в программе: K1 =

Построим матрицу жёсткости конечного элемента № 2 с изгибной жёсткостьюEI = 100000 и длиной L2 = 2:
K2:= K(105,L2)
Посмотрим на вычисленные значения элементов матрицы K2: K2 =

Матрица жёсткости конечного элемента № 3: K3:= K(105,L3) K3 =

Теперь сформируем глобальную матрицу жёсткости расчётной модели балки в единой (глобальной) системе координат. Сначала установим соответствие локальных номеров степеней свободы конечных элементов (по четыре в каждом конечном элементе) с глобальной нумерацией степеней свободы расчётной модели. Сделаем это с помощью формируемых векторов топологии А1, А2, А3, которые будут содержать по четыре глобальных номера степеней свободы 1-го, 2-го и 3-го конечных элементов, а также с помощью т.н. матриц положения (аллокации) конечных элементов С1, С2, С3:
Векторы топологии:
 A2:= A1 + 2
A2:= A1 + 2  A3:= A2 + 2
A3:= A2 + 2 
Формирование матриц положения конечных элементов:
С1Ne,Ns:= 0 C2:= C1 C3:= C1 C4:= C1
Цикл по количеству степеней свободы в элементе Ne (знак операции цикла «.. » находится на Панели инструментов Mathcad в опции «Матрица», а нижние индексы, здесь обозначающие номера элементов массивов, можно ставить с помощью клавиши «[» (открывающая квадратная скобка) или клавишей «.» (точка)):
i:= 1.. Ne



С помощью матриц положения разместим локальные матрицы жёсткости конечных элементов в поле общей (глобальной) матрицы жёсткости балки в соответствии с глобальной нумерацией их степеней свободы:
Матрица жёсткости 1-го конечного элемента на поле глобальной матрицы жёсткости:
K1g:= C1Т × К1 × C1
(знак транспонирования матрицы берём из опции «Матрица» Панели инструментов Mathcad).
Посмотрим, как выглядит вычисленная матрица K1g: K1g =

Матрица жёсткости 2-го конечного элемента на поле глобальной матрицы жёсткости:
K2g:= C2Т × К2 × C2 K2g =
Матрица жёсткости 3-го конечного элемента:
K3g:= C3Т × К3 × C3 K3g =

Построим глобальную матрицу жёсткости балки K сложением локальных матриц жёсткости конечных элементов:
К:= K1g + K2g + K3g
Посмотрим на вычисленную матрицу К: К =

3. Сформируем вектор правой части F (вектор нагрузки) системы уравнений равновесия метода перемещений K∙U = F:
 Сначала построим вектор заданных внешних узловых усилий Fp (с учётом принятого вначале правила знаков): сосредоточенной силы Р = 9 (кН), действующей вдоль 3-й степени свободы расчётной модели балки, и изгибающего момента М = 6 (кН∙м), действующего по 8-й степени свободы расчётной модели:
Сначала построим вектор заданных внешних узловых усилий Fp (с учётом принятого вначале правила знаков): сосредоточенной силы Р = 9 (кН), действующей вдоль 3-й степени свободы расчётной модели балки, и изгибающего момента М = 6 (кН∙м), действующего по 8-й степени свободы расчётной модели:
 посмотрим на вектор: Fp =
посмотрим на вектор: Fp =
| q |
| L |
Будем использовать его для приведения нагрузки, распределённой на 2 и 3 конечных элементах, к узловым степеням свободы.
Узловые равнодействующие от распределённой нагрузки на 2-м конечном элементе:



на поле глобального вектора нагрузки: Fq2g:= C2Т ∙ Fq2
Узловые равнодействующие от распределённой нагрузки на 3-м конечном элементе:


на поле глобального вектора нагрузки:
Fq3g:= C3Т ∙ Fq3 
Узловые равнодействующие от распределённой нагрузки, действующей на балку:
Fq:= Fq2g + Fq3g 
Суммарный вектор нагрузки:
F:= Fp + Fq 
4. Формирование и решение системы уравнений равновесия метода перемещений K∙U = F:
Определим и отметим в программе незакреплённые степени свободы балки, в направлении которых будем вычислять узловые перемещения:
u2:= 0 u3:= 0 u4:= 0 u6:= 0 u7 = 0 u8 = 0
Теперь отметим в программе закреплённые степени свободы балки, в направлении которых будем вычислять опорные реакции:
R1:= 0 R5:= 0
Построим и решим систему линейных уравнений для вычисления перемещений узлов балки в направлениях свободных степеней свободы и для выявления опорных реакций – в направлении закреплённых степеней свободы:
Given


В матричной записи системы уравнений K∙U = F + R следовало поставить знак тождества из опции «Булева алгебра» на Панели инструментов Mathcad.
Решение системы уравнений – вектор узловых перемещений в направлении степеней свободы расчётной модели балки (в м, рад):


Реакции в опорах:


5. Вычисление узловых значений внутренних усилий (поперечных сил и изгибающих моментов):
Направления усилий в крайних узловых (левом и правом) сечениях конечных элементов определены в соответствии с принятыми вначале правилами знаков. Но при этом, выбирая знаки внутренних усилий при построении их эпюр, будем руководствоваться правилами знаков строительной механики (см. рисунок):
- поперечные силы, «вращающие» элемент по часовой стрелке – положительные;
- изгибающие моменты, растягивающие нижние волокна элемента – положительные.
Правила знаков строительной механики (положительные направления):
Конечный элемент № 1 (узлы с номерами 1 и 2)
Перемещения в узлах 1-го конечного элемента (м):
U1:= C1×U 
Здесь ui – прогиб балки (м) в i – ом узле, φi – угол поворота оси балки (рад) в i – ом узле.
Внутренние усилия в узлах 1-го конечного элемента (кН, кН∙м):
S1:= K1×U1 
Конечный элемент № 2 (узлы с номерами 2 и 3)
Перемещения в узлах 2-го конечного элемента (м, рад):
U2:= C2×U 
Внутренние усилия в узлах 2-го конечного элемента (кН, кН∙м):
S2:= K2×U2 – Fq2 
Конечный элемент № 3 (узлы с номерами 3 и 4)
Перемещения в узлах 3-го конечного элемента (м, рад):
U3:= C3×U 
Внутренние усилия в узлах 3-го конечного элемента (кН, кН∙м):
S3:= K3× U3 – Fq3 
Эпюра внутренних изгибающих моментов
 :
:
Эпюра внутренних поперечных сил
 :
:
6. Вычисление прогибов балки во внутренних сечениях конечных элементов с использованием функции формы
В результате расчёта балки методом конечных элементов получены значения прогибов ui и углов поворота оси балки φi (первых производных от функции прогибов  ) в узлах конечно-элементной сетки (тут i – номер узла, x – ордината вдоль оси балки). Для более точного построения эпюры прогибов по этим значениям ui и φi можно проинтерполировать функцию прогибов u(x) внутрь каждого конечного элемента. Для такой интерполяции возможно использовать кубический полином, как частный случай полинома Эрмита:
) в узлах конечно-элементной сетки (тут i – номер узла, x – ордината вдоль оси балки). Для более точного построения эпюры прогибов по этим значениям ui и φi можно проинтерполировать функцию прогибов u(x) внутрь каждого конечного элемента. Для такой интерполяции возможно использовать кубический полином, как частный случай полинома Эрмита:
P(x) = a + b∙x + c∙x2 + d∙x3
Определим коэффициенты a, b, c, d кубического полинома P(x), интерполирующего внутри элемента функцию прогибов u(x), зная на концах элемента длиной l значения прогибов и углов поворота (первой производной от функции прогибов):
 ,
,  (при x = 0)
(при x = 0)
и  ,
,  (при x = l).
(при x = l).
Ещё раз сформулируем эти 4 условия (как 4 уравнения относительно неизвестных коэффициентов a, b, c, d), которые полином P(x) должен исполнять на границах элемента:
при x = 0: P(0) = и 
1) P(x = 0) = a, отсюда a = .
2)  = b, отсюда b =
= b, отсюда b =  .
.
при x = l: P(0) = и 
3) P(x = l) = a + b ∙ l + c ∙ l 2 + d ∙ l 3 = .
4)  = b + 2 ∙ c ∙ l + 3 ∙ d ∙ l 2 =
= b + 2 ∙ c ∙ l + 3 ∙ d ∙ l 2 =  .
.
Подставим очевидные из уравнений 1) и 2) значения коэффициентов a = и b = в уравнения 3) и 4):
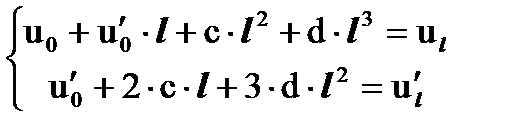
или относительно неизвестных c и d: 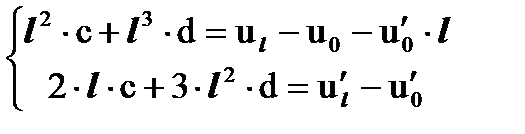
Решив эту систему из двух уравнений относительно неизвестных c и d, получаем:


Подставим найденные значения коэффициентов a, b, c, d в полином P(x) = a + b∙x + c∙x2 + d∙x3. Запишем 4 условия на границах конечного элемента уже с найденными выражениями для коэффициентов a, b, c, d. При этом сгруппируем слагаемые полинома P(x) при сомножителях , , , :
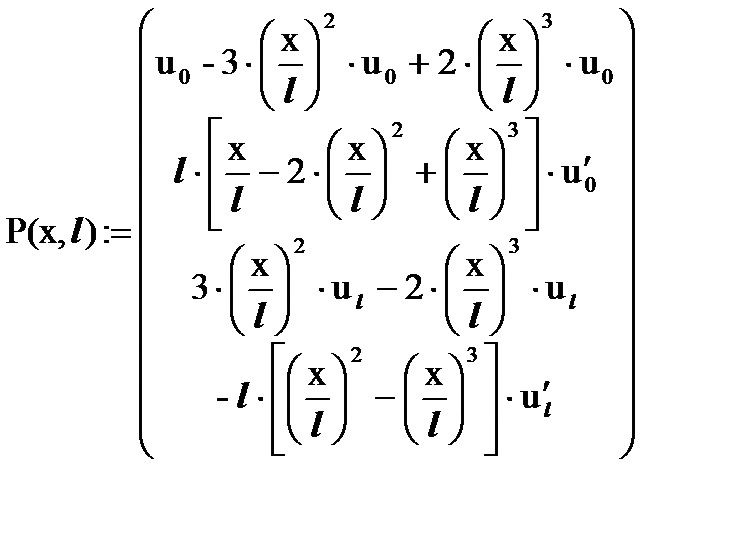
Теперь представим эту запись в виде скалярного произведения векторов:
 ,
,
где  ,
,  - вектор-функция формы конечного элемента.
- вектор-функция формы конечного элемента.
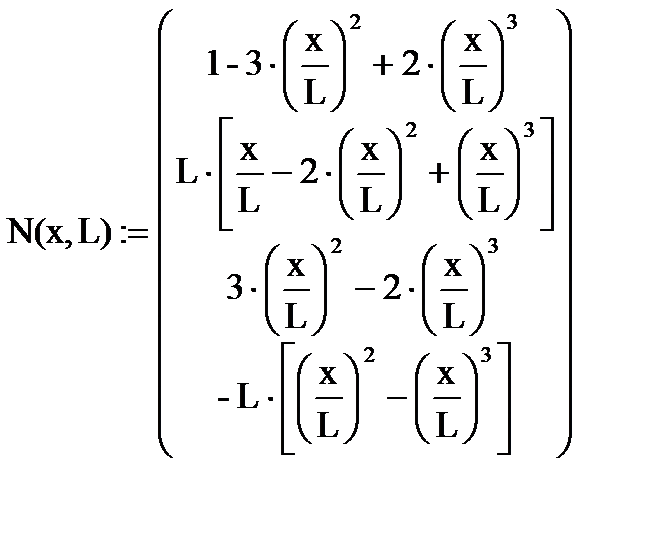
Таким образом, полученный вектор функции формы N(x,L) балочного конечного элемента длиной L имеет общий вид:
| Локальная ордината поперечного сечения элемента, в котором вычисляется прогиб |
Вычисление прогибов в средней точке 1-го конечного элемента (x = 2.0м):
N(2.0, L1)Т ∙U1 = 1.689 × 10 – 4 (м)
Прогиб в середине 2-го элемента (x = 1.0м):
N(1.0, L2)Т ∙U2 = 8.722 × 10 – 5 (м)
Прогибы в серединных сечениях 3-го элемента (x = 0.5м и x = 1.0м):
N(0.5, L3)Т ∙U3 = - 1.653 × 10 – 5 (м)
N(1.0, L3)Т ∙U3 = - 1.222 × 10 – 5 (м)
Эпюра прогибов балки