Лекция 20
ОТДЕЛОЧНЫЕ МАШИНЫИ ОБОРУДОВАНИЕ (добавить ручные машины)
К отделочным работам относятся штукатурные, облицовочные, малярные, стекольные, работы по устройству полов, потолков и вспомогательные по устройству подмостей.
Оборудование для штукатурных работ
При производстве штукатурных работ удаляется старая штукатурка, и насекается поверхность, приготовляется, транспортируется и наносится штукатурный раствор, который после нанесения затирается. Раствор транспортируют растворонасосами, подъемниками в емкостях корытного типа.
На поверхность раствор наносят соплами. В пневматических соплах раствор подается и распыляется сжатым воздухом.
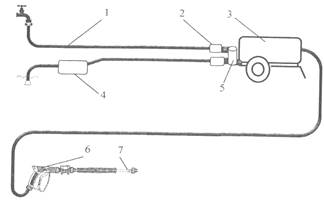
| Водоструйный агрегат для очистки поверхностей: 1 – шланг высокого давления, 2 - кран регулировки подачи воды, 3,4 – насос (основной и вспомогательный), 5 – фильтр, 6 – пистолет, 7 – насадка. Давление воды 3-250 МПа, расход 50-2400 л/ч. Применяется для удаления старой краски, штукатурки, битума, грязи и т.п. |
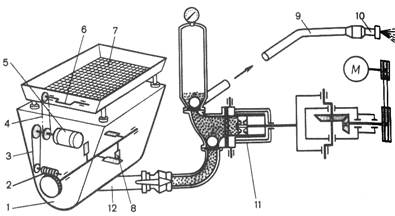
| Штукатурный агрегат на базе поршневого насоса: 1 – приемный бункер, 2 – червячный редуктор, 3 – клиноременная передача, 4 – цепная передача, 5 – электродвигатель, 6 – экцентриковый вал, 7 – вибросито, 8 – побудитель с лопастями, 9 – напорный растворовод, 10 – форсунка, 11 – растворонасос, 12 – всасывающий рукав. Предназначен для процеживания, побуждения, подачи и нанесения штукатурных растворов на обрабатываемые на поверхности |
Раствор загружают через вибросито в бункер 1 с побудителем 8, откуда по всасывающему рукаву 12 засасывается в камеру насоса 11 и затем подается по напорному водоводу 9 к форсунке 10 и наносится на поверхность. Работа механизмов осуществляется от электродвигателей.
| Двухдисковая штукатурно-затирочная машина: 1,2 – наружный и внутренний затирочные диски, 3 – редуктор, 4 – электродвигатель. Производительность 50 м2/ч. |
Оборудование для окрасочных работ
При выполнении окрасочных работ приготавливают шпаклевки, грунтовки, краски и наносят на поверхность с помощью агрегатов пневматического распыления.
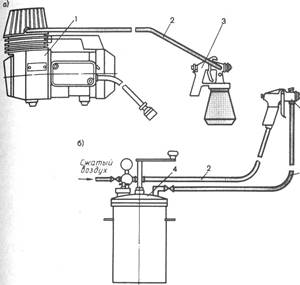
| Переносной окрасочный агрегат (а): 1 – компрессор, 2 - рукав воздуховода, 3 – пистолет - краскраскораспылитель, 4 – питающий кабель. Применяют при малых объемах работ. Передвижной окрасочный агрегат (б): 1 - пистолет – краскраскораспылитель, 2 – воздушный рукав, 3 – рукав для краски, 4 – бак для краски. |
Оборудование для отделки полов

| Паркетострогальная машина: 1,16 – передний и задний ролики, 2 – ножевой барабан, 3 – корпус, 4,5,6 – крепление ножей, 7 – винт для натяжения ремня, 8 – электродвигатель, 9 – траверса, 10 – рукоять, 11,12,13 – пульт управления. Ножевой барабан приводится во вращение отэлектродвигателя через клиноременную передачу. Строгание ведется ножами вращающего барабана при плавном передвижении машины. | |

| Паркетошлифовальная машина: 1 – шлифовальный барабан, 2 – крышка, 3 – ограничительный ролик, 4,8 – клиноременные передачи, 5 – винт для регулировки ремней, 6 – платформа, 7 – электродвигатель, 9 – винт для регулировки давления барабана на поверхность, 10,11,12 - рукоять с пультом управления, 13 – корпус, 14,16 – ходовые колеса, 15 – пылесос. Производительность 48м2/ч, ширина полосы 0,2м. | |
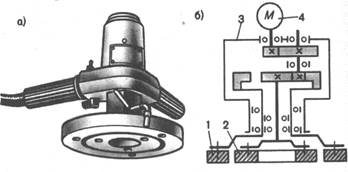
| Шлифовальная машина для затирки цементных стяжек: 1 – рукоять управления, 2 – электродвигатель, 3 - редуктор, 4 – шлифовальные диски. Ширина полосы 0,425м. |
Лекция 21
РОБОТЫИ МАНИПУЛЯТОРЫ
Роботы – класс машин-автоматов, способных в процессе работы воспроизводить двигательные и определенные интеллектуальные функции человека.
Манипулятор робота – исполнительное устройство в виде многозвенного механизма, оснащенного приводом и рабочим органом, и выполняющее движения, аналогичные функциям руки человека при перемещении объектов в пространстве.
По характеру работ промышленные роботы подразделяются на три группы:
1. Технологические роботы выполняют основные операции технологического процесса (например: гибка, сварка, окраска, сборка и т.п.).
2. Вспомогательные роботы выполняют действия типа «взять – принести - положить».
3. Универсальные роботы выполняют как основные, так и вспомогательные технологические операции.
По степени специализации: на специальные (выполняют определенную технологическую операцию), специализированные (операции одного вида: окраска, сборка и т.д) и многцелевые.
Рабочие органы роботов (манипуляторов) в основном выполнены в виде захватных устройств (захватывают изделие или инструмент: пистолеты для окраски, шлифовальные и сверлильные инструменты).
Приводы роботов бывают электромеханические, гидравлические, пневматические и комбинированные.
Информационная система роботов, следящая за работой механизмов и внешней средой, состоит из аппаратных и программных средств (различных датчиков-преобразователей, релейных устройств, микропроцессорных устройств и т.п.)
Автоматическое управление и выполнение заданных операций роботом обеспечивается системой программного управления.
Напольные роботы с горизонтальной выдвижной рукой предназначены для выполнения простых транспортно-разгрузочных операций.
      
| Рис Передвижной манипуляционный робот: 1 – ходовая аккумуляторная тележка, 2 - поворотная часть, 3 – шарнирно - сочлененная стрела, 4 – рычажно-тяговые механизмы, 5 - направляющий модуль, 6 - захват, 7 – гидроцилиндр выдвижения стрелы.
Погрешность позиционирования  (отклонение конечной точки манипулятора от заданного положения).
Грузоподъемность различных моделей в пределах до 800кг. (отклонение конечной точки манипулятора от заданного положения).
Грузоподъемность различных моделей в пределах до 800кг.
| ||||||||||||||

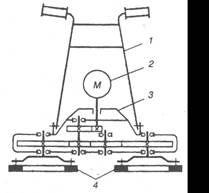
| Подвесные транспортные роботы используются для транспортирования деталей и изделий. Некоторые из них выполняются в виде тельферной тележки на монорельсе с подъемником и автоматическим захватом. Они по командам захватывают груз, транспортируют его и ставят на другую позицию. Подвесной транспортный робот: 1 – тележка, 2 – монорельс, 3 – направляющая, 4 – захват автоматический, 5 – сетка защитная от падения, 5 – электродвигатель, 6 – телескопические тяги. Грузоподъемность до 250кг. | ||||||||||||||
Транспортные роботы изготавливаются в виде автоматических тягачей-тележек. Применяются для буксировки транспортных средств и перевозки грузов в кузове, некоторые могут осуществлять саморазгрузку с помощью манипулятора.
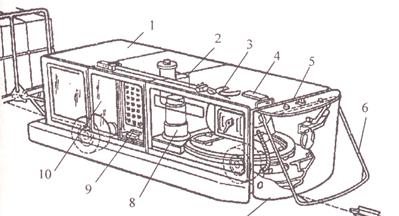 Рис Транспортный робот: 1 – тележка с аппаратурой (тормозная катышка, транзисторное устройство, аккумуляторная батарея и др.), 2 – пневмоколесное шасси, 3 – кабель, 4 – буксируемое средство.
Рис Транспортный робот: 1 – тележка с аппаратурой (тормозная катышка, транзисторное устройство, аккумуляторная батарея и др.), 2 – пневмоколесное шасси, 3 – кабель, 4 – буксируемое средство.
| Транспортные роботы в основном двигаются по замкнутой трассе. По кабелю вдоль трассы подают электрический переменный ток, в результате вокруг него образуются магнитные силовые линии, воздействующие на датчики робота. Посредством изменения частоты переменного тока осуществляют торможение и поворот, изменяют скорость и направление движения. |
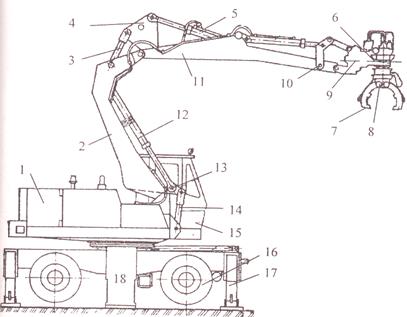
| Строительный манипулятордля работы в стесненных условиях: 1 – поворотная часть (силовое и рабочее оборудование, кабина), 2 – плечо, 3,4,13,14 – рычажно-тяговые механизмы, 4 – рычаг, 5,12 – гидроцилиндры, 7 – захват, 11 – стрела, 15 – кабина, 16-18 – опорно-ходовое устройство. Рабочие органы: гидротрамбовки, ковши, различные захваты и т.п. Управление автоматизированное (часть операций выполняется автоматически и часть с помощью оператора). Применение: при устройстве сетей водоснабжения для копания траншей и приямков, укладки труб и их стыковки, уплотнения грунта. |
Ручные машины
У ручной машины движение рабочего органа выполняется двигателем, подача и управление – вручную, а масса частично или полностью воспринимается оператором.
Используют при выполнении монтажных, санитарно-технических, отделочных, кровельных и др. работ.
Различают по типу привода: на электрические, пневматические, гидравлические и пиротехнические.
По принципу действия рабочего органа: на вращательные (дисковые пилы, шлифовальные машины, гайковерты и т.д.); на вращательно-ударные (перфораторы); ударные (отбойные молотки, бетоноломы, трамбовки), возратно-поступательные (напильники, лобзики), вибрационные (вибраторы различного назначения).