Введение
Современные системы связи передачи и приёма информационных данных являются сложной модульной структурой, перед которой стоят очень важные задачи. Задачи каждой системы связи заключаются в транспортировке информационного сигнала с определёнными качественными характеристиками, основными из которых можно выделить скорость и надежность. Модульность системы осложняет её создание и обслуживание, вызывая необходимость в высококвалифицированных специалистах, но при этом, позволяет добиться более высоких результатов в вопросах, основанных на поставленных задачах. Еще одним преимуществом модульности систем связи является возможность их модернизации путем замены устаревших модулей на более современные. Именно поэтому рассмотрение малых структурных составляющих при обучении высококвалифицированного специалиста играет огромную роль, дабы впоследствии обеспечивать и поддерживать высокое качество системы связи, за эксплуатацию которой он несет ответственность. На данный момент, системы связи просочились в каждую область нашей повседневной жизни и отвечают за множество больших и не очень задач, благодаря которым каждый день наша жизнь приобретает привычный для нас облик.
В данном проекте поставлена задача создания коррелятора m-последовательности. Коррелятор является одним из модулей системы связи, поэтому улучшение его характеристик, позволяет улучшать качество системы связи в целом. Для понимания устройства и принципа работы коррелятора, очень важно рассматривать создание коррелятора поэтапно, уделив каждому из этапов достаточное внимание. Понимание всех шагов по созданию коррелятора позволит в случае обнаружения неисправностей или ошибок, быстро найти их причины, а также, даст основу, на которой можно построить процесс дальнейшей модернизации существующей системы.
В проекте можно выделить следующие задачи:
- рассмотрение общих теоретических сведений о корреляторах;
- выбор и обоснование средств создания коррелятора, концепция коррелятора;
- описание алгоритма создаваемого коррелятора;
- описание сопряжения платы Arduino и ранее созданного генератора m-последовательности;
- описание испытаний коррелятора и интерпретация результатов испытаний.
Рассмотрим каждый из этапов подробнее.
Теоретические сведения о корреляторах
Как уже упоминалось, современные системы связи являются сложными структурами, состоящими из множества элементов. Подобная структуризация позволяет в малых элементах большой системы добиваться улучшения её качественных характеристик, за счёт общей суммы которых повышается качество системы связи в целом. Коррелятор является одним из таких элементов структурной системы связи, винтиком в большой системе, облегчающим работу всей системы, позволяя выполнять её быстрее и качественнее.
Коррелятор, это специализированное устройство для автоматического вычисления корреляционных функций и взаимных корреляционных функций стационарных случайных процессов (либо процессов, приводимых к стационарным). Название данного устройства происходит от названия явления «корреляция». «Корреляция» (от лат. correlatio «соотношение, взаимосвязь»), или корреляционная зависимость — статистическая взаимосвязь двух или более случайных величин (либо величин, которые можно с некоторой допустимой степенью точности считать таковыми). Впервые в научный оборот термин «корреляция» ввёл французский палеонтолог Жорж Кювье в XVIII веке. Он разработал «закон корреляции» частей и органов живых существ, с помощью которого можно восстановить облик ископаемого животного, имея в распоряжении лишь часть его останков. В статистике слово «корреляция» первым стал использовать английский биолог и статистик Фрэнсис Гальтон, в конце XIX века.
При использовании корреляции в сфере связи для передачи различных информационных сигналов и полезных сигналов, перед ней можно решить несколько задач и использовать в нескольких различных целях. В зависимости от поставленных задач, можно использовать различные инструменты и методы для их достижения.
Так, перед использующим явление «корреляции» устройством может стоять вопрос сравнения на идентичность двух полученных сигналов между собой.
Помимо вышеупомянутого сравнения сигналов, «корреляция» может использоваться для различения получаемых сигналов. Таким образом, явление «корреляции» при получении сигналов, позволяет найти различные между собой сигналы, а затем обнаружить и выделить только необходимый сигнал.
Дополнительно, «корреляция» может быть полезной в случае сравнения сигнала с его копией. Для более глубоко понимания и наглядной демонстрации полезности и функциональных возможностей «корреляции», рассмотрим инструменты, с помощью которых становится возможным использовать явление «корреляция» для решения задач построения надежной и функциональной системы связи.
В радиотехнической связи для изучения корреляции выделяют как минимум две функции, являющиеся инструментальными методами для оценивания корреляции. Рассмотрим каждую из них поподробнее.
 |
Первая рассматриваемая функция носит название взаимнокорреляционная функция (далее, ВКФ). Взаимнокорреляционная функция — это стандартный метод оценки степени корреляции двух последовательностей. На рисунке 1 можно увидеть визуальное краткое представление взаимной корреляции.
Рисунок 1 – Визуальное представление ВКФ.
ВКФ часто используется для поиска в длинной последовательности более короткой заранее известной последовательности сигналов. Помимо этого, она используется при обработке сигналов, например, для распознавания отраженного от объекта локационного сигнала (радаров, сонаров) в условиях помех. Также используется для анализа случайных процессов, например, в измерениях и статистике.
Взаимная корреляция по своей природе аналогична свертке двух функций. Помимо этого, взаимная корреляция имеет тесную взаимосвязь со свёрткой. свойства этой взаимосвязи используются вместе с алгоритмами быстрого преобразования Фурье для эффективного вычисления величины взаимной корреляции. В этой работе, при обсуждении ВКФ свойства ВКФ перечислены, но не рассмотрены подробно.
Взаимная корреляция вычисляется по формуле:

 (1)
(1)
где i — это сдвиг между последовательностями относительно друг друга, а верхний индекс в виде звёздочки означает комплексное сопряжение. В общем случае, для непрерывных функций f(t) и g(t) взаимная корреляция определяется как:
 (2)
(2)
На рисунке 2 изображено статическое изображение визуально анимированного вычисления взаимной корреляции. Для того, чтобы была возможность наглядно показать работу ВКФ, вместе с данным проектом в Приложении 1 приводится графический файл компьютерной анимации.

Рисунок 2 – Статистическое изображение анимации, отображающей визуально, как вычисляется взаимная корреляция.
Следующий рассматриваемый метод для проведения корреляции носит название автокорреляционная функция (далее, АКФ). В англоязычной литературе часто можно встретить её определение как последовательная корреляция. Автокорреляционная функция — это зависимость взаимосвязи между функцией (сигналом) и её сдвинутой копией от величины временного сдвига. Визуальное представление явления автокорреляции можно увидеть на рисунке 3.

Рисунок 3 – Визуальное представление АКФ.
Анализ автокорреляции — это математический инструмент для поиска повторяющихся фигур, таких как наличие периодического сигнала, скрытого шумом, или выявления недостающей основной частоты в сигнале, подразумеваемом его гармоническими частотами. Он часто используется в обработке сигналов для анализа функций или рядов значений, таких как сигналы временной области. Если исходная функция строго периодическая, то на графике автокорреляционной функции тоже будет строго периодическая функция. Таким образом, из этого графика можно судить о периодичности исходной функции, а, следовательно, и о её частотных характеристиках. АКФ применяется для анализа сложных колебаний, например, электроэнцефалограммы человека. Приведём визуальные примеры использования АКФ на простых сигналах на рисунке 4. На рисунке 4a.а и 4a.б изображен простой сигнал в виде прямоугольного импульса и его АКФ. На рисунке 4b.a и 4b.б изображен фазоманипулированный шумоподобный сигнал длительностью Т и его АКФ.

Рисунок 4 – Примеры, иллюстрирующие свойства АКФ при использовании на различных сигналах.
При использовании в сфере связи, в частности при обработке сигналов автокорреляция часто используется без нормализации, то есть без вычитания среднего и деления на дисперсию. Когда АКФ нормируется по среднему значению и дисперсии, ее иногда называют коэффициентом автокорреляции или функцией автоковариации. Корреляционные свойства кодовых последовательностей, используемых в широкополосных системах, зависят от типа кодовой последовательности, её длины, частоты следования её символов и от её посимвольной структуры. Изучение АКФ играет важную роль при выборе кодовых последовательностей с точки зрения наименьшей вероятности установления ложной синхронизации.
Для детерминированных сигналов АКФ сигнала f(t) определяется интегралом:
 (3)
(3)
Данная формула показывает связь сигнала (функции f(t)) с копией самого себя, смещённого на величину τ. Звёздочка означает комплексное сопряжение.
Для случайных процессов АКФ случайной функции X(t) имеет вид:
 (4)
(4)
где E{ } — математическое ожидание, звёздочка означает комплексное сопряжение.
Приведём изображение того вида, который должна принять АКФ в идеальном случае на рисунке 5. Именно такую АКФ имеют длительные реализации шума, что и объясняет название «шумоподобные» сигналы.

Рисунок 5 – Вид идеальной АКФ.
В довершении рассматривания методов корреляции, представим изображение 6, где визуально отображены обе функции для сравнения между собой.

Рисунок 6 – Сравнение визуальных представлений ВКФ и АКФ.
Итак, перейдём к рассмотрению непосредственно коррелятора. Как уже было сказано ранее, коррелятор – это специализированное устройство для автоматического вычисления ВКФ и АКФ (которые были рассмотрены выше) стационарных процессов или же приведённых к ним. Обычно этот термин применяется для определения любого преобразователя, выходной сигнал которого можно рассматривать как корреляционную функцию входных сигналов. Подобные корреляторы широко применяются в радиотехнике, технике автоматического управления и подобном.
В качестве физической реализации коррелятора выступает согласованный фильтр, из-за чего очень часто определения АКФ и ВКФ приравнивают друг к другу.
Введём понятие согласованного фильтра — это линейный оптимальный фильтр, построенный исходя из известных спектральных характеристик полезного сигнала и шума. Согласованные фильтры предназначены для выделения сигналов известной формы на фоне шумов. Под оптимальностью понимается максимальное отношение сигнал/шум на выходе фильтра, при этом форма сигнала при прохождении через фильтр изменяется. Если на входе приемника действует сигнал равный сумме полезного сигнала и помехи или только помехе, то оптимальный приемник в случае сигнала с полностью известными параметрами вычисляет так называемый корреляционный интеграл, а затем сравнивает его величину с порогом. Если помеха является гауссовским случайным процессом, спектральная плотность которого равномерна (белый шум), то корреляционный интеграл принимает такой вид:
 (5)
(5)
Значение подобного корреляционного интеграла находится с помощью коррелятора или же согласованного фильтра. Рассмотрим структурную схему коррелятора и согласованного фильтра на рисунках 7 и 8 соответственно.

Рисунок 7 – Структурная схема коррелятора.
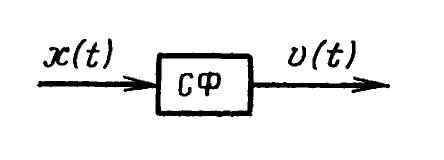
Рисунок 8 – Структурная схема согласованного фильтра.
Основными элементами коррелятора, как можно видеть на рисунке 7, являются перемножитель, генератор сигнала и интегратор. На перемножитель поступают входной сигнал и сигнал от генератора сигнала. Произведение сигналов интегрируется с момента прихода и до момента окончания обнаруживаемого сигнала. Отметим, что коррелятор является устройством с переменными параметрами, так как режим его зависит от изменения сигнала во времени.
Поскольку операции умножения и интегрирования линейны, то коррелятор является линейным устройством. Имея в виду, что он отфильтровывает сигнал от помех и является линейным устройством с переменными параметрами, его иногда называют активным фильтром в отличие от пассивных фильтров, параметры которых постоянны во времени. Согласованный фильтр является пассивным фильтром. Напряжение на выходе согласованного фильтра в момент окончания сигнала с точностью до постоянного множителя, а равно напряжению на выходе коррелятора.[ВАН1]
Общим между коррелятором и согласованным фильтром является равенство (с точностью до постоянной) выходных напряжений в момент времени. Это и определяет их взаимную эквивалентность с точки зрения обнаружения сигнала.
Различие заключается в следующем. Коррелятор является устройством с переменными во времени параметрами, а согласованный фильтр — устройством с постоянными параметрами. Следствием этого является то, что согласованный фильтр инвариантен относительно задержки сигнала и его начальной фазы (насколько эти величины изменятся в сигнале на входе фильтра, настолько они изменятся и в сигнале на выходе), а коррелятор не инвариантен. Если сигнал имеет несколько неизмеряемых или измеряемых случайных параметров, то структура оптимального приемника изменяется, но его основная часть остается прежней, так как всегда должен быть согласованный фильтр или коррелятор.
Таким образом, несмотря на то, что во множестве книг можно найти указание на эквивалентность одного с другим, необходимо заметить, что процессы, которые имею место в схемах согласованного фильтра и коррелятора, являются разными.
Для лучшего понимания этого утверждения, рассмотрим это на примере обработки радиоимпульса s(t) и отобразим происходящие процессы на рисунке 9.

Рисунок 9 – Иллюстрация происходящих в корреляторе и согласованном фильтре процессов.
Иная ситуация имеет место при обработке импульсов с существенно ограниченным спектром с помощью коррелятора, как рассмотрено на рисунке 10. При демодуляции сигналов цифровой модуляции время обработки коррелятором не может быть больше Т. В таком случае отношение сигнал / шум на выходе коррелятора меньше, чем при обработке согласованным фильтром. Время обработки согласованным фильтром равняется длительности его импульсной реакции, а она равна длительности сигнала, и все значения сигнала используются при обработке.
По этой причине коррелятор применялся в демодуляторах сигналов цифровой модуляции, которые использовали слабо фильтрованные П-импульсы, когда длительность сигнала практически равнялась длительности тактового интервала. При использовании импульсов с существенно ограниченным спектром применяются согласованные фильтры.

Рисунок 10 – Обработка импульса коррелятором.
Наибольшее распространение в системах связи нашли корреляторы, в которых вычисляют корреляционные функции с использованием перемножения входных сигналов (задержанного и незадержанного), в связи, с чем подобные корреляторы получили название мультипликационных или корреляторов с умножением входных сигналов. Блок-схемы реализации подобных корреляторов представлены на рисунке 11.

Рисунок 11 – Блок схемы реализации мультипликационных корреляторов.
Мультипликационный коррелятор для вычисления взаимной корреляционной функции осуществляет:
· преобразование входных сигналов в соответствующие физические величины (напряжение, ток, световой поток) с предварительной обработкой (центрирование, квантование по уровню или по времени и т. д.);
· относительный сдвиг (задержку) одного из сигналов на время τ в блоке регулируемого запаздывания БРЗ, перемножение двух сигналов в множительном устройстве МУ;
· усреднение полученного в течение интервала времени Т произведения в усредняющем (или интегрирующем) звене, показ или регистрацию вычисленных значений корреляционной функции, соответствующих заданным значениям аргумента с помощью индикаторного, или регистрирующего, устройства ИУ.
Процесс вычисления корреляционных функций может осуществляться как последовательным, так и параллельным способом. В первом случае вычисление производится последовательно, точка за точкой, для каждого заданного значения τ. Для получения всей кривой корреляционной функции операции вычисления повторяются при различных значениях τ, при этом может изменяться как непрерывно, так и дискретно. Полное время вычисления:
Тп = Т (N+1), (6)
где Т — время усреднения при вычислении одной точки корреляционной функции, N - количество вычисленных точек.
Для параллельного способа вычисления коррелятор выполняется в виде многоканального устройства с числом каналов, равным числу одновременно вычисляемых точек корреляционных функций. Каждый канал содержит свое множительное устройство (МУ) и усредняющее (интегрирующее) звено И, а также устройство задержки, обеспечивающее запаздывание, соответствующее данной точке корреляционной функции. Упрощенная блок-схема мультипликационного коррелятора параллельного действия изображена на рисунке 11.2. Использование схем параллельного действия ускоряет время анализа, однако существенно усложняет схему коррелятора.
В зависимости от формы представления сигналов при вычислении корреляционных функций различают аналоговые корреляторы (непрерывного действия) и цифровые (дискретного действия). Известен также ряд гибридных корреляторов, в которых используется как аналоговая, так и цифровая формы представления сигналов. Наиболее распространены аналоговые корреляторы, обеспечивающие при сравнительной простоте устройства удовлетворительную точность вычисления функций (погрешность порядка нескольких процентов). Цифровые корреляторы позволяют получать точность значительно выше по сравнению с аналоговыми, но они более сложны.