Чувствительным элементом, измеряющим отклонение стабилизированной платформы от заданного положения является датчик угловой скорости (ДУС), роль которого выполняет волоконно-оптический гироскоп (ВОГ), сигнал на выходе которого пропорционален угловой скорости вращения платформы. Поэтому для устранения статической ошибки стабилизации сигнал с выхода ВОГ поступает на интегратор, на выходе которого формируется напряжение пропорциональное уже не скорости, а углу отклонения платформы.
Далее это напряжение поступает на вход корректирующего звена, которое формирует необходимый вид ЛАХ для обеспечения устойчивости работы ГС. После предварительного усиления напряжение пропорциональ-ное углу отклонения платформы поступает на схему гальванической развязки, которая обеспечивает развязку по цепям питания между схемой управления и усилителем мощности (УМ), между сильноточными и слаботочными цепями схемы. Это необходимо для увеличения помехозащищенности канала обратной связи, кроме того это позволяет запитывать УМ непосредственно от первичного источника питания (аккумулятора или внешнего блока питания) без использования мощных преобразователей напряжения для питания УМ.
Далее сигнал подается на вход усилителя мощности, который обеспечивает подачу управляющего напряжения на двигатели стабилизации. УМ выполнен импульсным с использованием широтно-импульсной модуляции управляющего напряжения. Это позволяет повысить КПД УМ, что является актуальным с учетом требований к необходимости получения больших скоростей и ускорений управления положением телекамеры, что требует применения мощных двигателей стабилизации.
Одной из особенностей использования ВОГ является его высокая чувствительность к воздействию внешних электрических возмущений, что приводит к нарушению работы ВОГ вплоть до выхода его из строя. Поэтому в состав канала стабилизации необходимо обязательное включение специальной схемы защиты ВОГ.
Рассмотрим некоторые возможные варианты конструкции ДУ.
1) Простейшая конструкция ДУ представлена на рис.1.
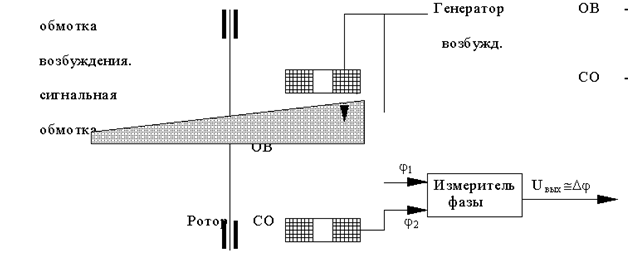
Рис.1.
С генератора на ОВ подаётся питающее напряжение. Напряжение на СО отстаёт по фазе от возбуждающего на величину пропорциональную косинусу угла поворота ротора, который выполнен в виде диска переменной толщины.
Недостатком данной конструкции является присутствие постоянного сдвига по фазе между сигналами на ОВ и СО, который в данной конструкции зависит не только от свойств материала ротора, но и от радиальных перемещений ротора и частоты напряжения возбуждения. Эту постоянную составляющую необходимо знать заранее и вычитать из полезного сигнала, что вносит дополнительную погрешность в точность установки нуля ДУ.
2) Для устранения влияния свойств материала ротора на уровень нулевого сигнала и устранение постоянного фазового сдвига применяется дополнительная “опорная” обмотка по конструкции аналогичная измерительной. Конструкция такого ДУ приведена на рис.2.

Рис.2.
На фазоизмеритель подаётся напряжение с двух сигнальных обмоток, сигнал в одной из которых является опорным, а в другой - измеряемым.
В данной конструкции изменение свойств материала ротора от воздействия внешних факторов (например температуры), изменение частоты питания обмотки возбуждения приводит только к изменению крутизны выходной характеристики ДУ. Кроме того уменьшается влияние радиальных смещений ротора.
Если необходимо стабилизировать крутизну ДУ, то это возможно выполнить введением в его конструкцию схемы стабилизации крутизны, представляющую собой дополнительный контур измерения фазы (аналогичный рис.1), который измеряет фазовое запаздывание на дополнительном участке ротора имеющего постоянную толщину при любом повороте ротора и схему управления частотой генератора возбуждения. Фазовое запаздывание измеряемое этим контуром сравнивается с “эталонным” и в случае их несовпадения вырабатывается сигнал управления частотой возбуждающего генератора. Хотя следует заметить, что чувствительность крутизны ДУ (DКр) зависящая от свойств материала ротора определяется в основном его температурным коэффициентом сопротивления (величина которого для металлов (1¸7)×10-3 [К-1]) в квадрате. Таким образом в ДУ без стабилизации крутизны DКр»1×10-6¸5×10-5, что для большинства приложений оказывается достаточным
Приведённые на рис.1 и рис.2 конструкции ДУ позволяют измерять углы поворота ротора не более 180°. Для измерения углов поворота ротора до 360°, в конструкцию необходимо добавить ещё один “комплект” возбуждающих и измерительных обмоток, расположенных под углом 90° к основным. Таким образом на выходе ДУ мы будем иметь два сигнала, один из которых пропорционален синусу, а второй - косинусу угла поворота ротора.
Описание вариантов исполнения электроники ДУ рассмотрим для конструкции ДУ приведённой на рис.2 в случаях аналогового и цифрового выходных сигналов. Следует заметить, что хотя фазу сигнала в выходных обмотках ДУ возможно “вращать” на большие углы, на практике желательно ограничиться углами в несколько десятков градусов для упрощения построения электронной части ДУ.
1) Электронная часть ДУ для случая цифрового выходного сигнала представлена на рис.3.
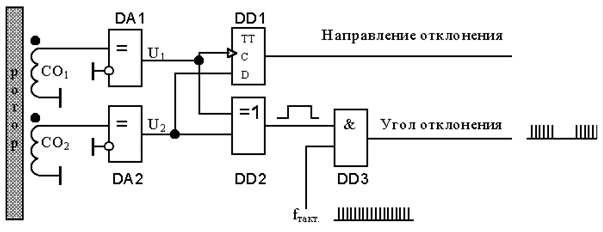
Рис.3
Схема обрабатывает сигнал поступающий с ДУ, конструкция которого представлена на рис.2. Компараторы DA1 и DA2 преобразуют синусоидальное напряжение поступающее с обмоток ДУ в прямоугольные импульсы не изменяя при этом фазу сигнала. Сигнал с обмотки СО1 является опорным. Передний фронт импульса напряжения U1 разрешает переключение триггера DD1 в состояние, определяемое логическим уровнем сигнала U2, знак которого в момент прихода фронта U1 определяется знаком разности фаз напряжений U1, U2. Одновременно импульсные последовательности U1 и U2 поступают на логический элемент DD2 (“исключающее ИЛИ”), на выходе которого дважды за период напряжения питания ДУ появляется сигнал логической единицы, длительность которого пропорциональна разности фаз напряжений U1, U2. Этот сигнал управляет прохождением тактовых импульсов fтакт,число которых в пачке на выходе DD3 будет пропорционально разности фаз U1, U2 и следовательно пропорционально углу поворота ротора.
Данная схема позволяет обрабатывать напряжения U1 и U2, разность фаз которых может изменяться в диапазоне от 0° до 180°.
2) Если выходной сигнал ДУ требуется получить в аналоговой форме, то электронная часть ДУ может быть выполнена, например, по следующей схеме (Рис.4.) [Л15,стр94].
В данной схеме выделение разности фаз напряжений U1 и U2 осуществляется с помощью логических элементов DD1...DD5 совместно с фильтром нижних частот выполненном на R1,R2,C1. Питание на DD1...5 подаётся стабилизированное двуполярное, чтобы обеспечить смену знака выходного напряжения Uвых при смене знака разности фаз. Операционный усилитель DA3 - буферный. Схема позволяет измерять разность фаз U1, U2 в диапазоне ±180°.
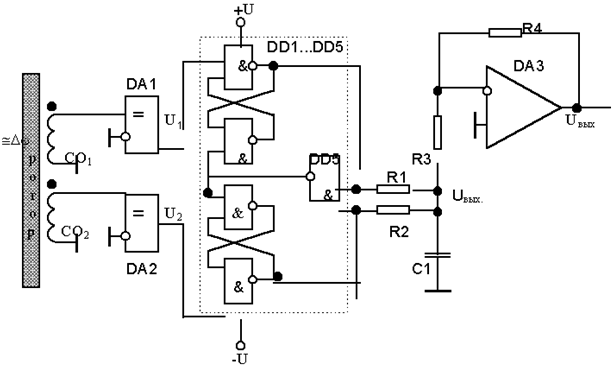
Рис.4.
Кроме данного варианта исполнения аналогового выхода ДУ, возможно построение фазового детектора на схемах аналоговых перемножителей [Л15]. При этом диапазон измерения разности фаз не превышает ±60°.