Глава 1. Дополнение. Преобразование декартовых прямоугольных координат на плоскости и в пространстве. Специальные системы координат на плоскости и в пространстве.
Правила построения систем координат на плоскости и в пространстве рассмотрены в основной части Главы 1. Были отмечены удобства применения прямоугольных систем координат. При практическом использовании средств аналитической геометрии часто возникает необходимость преобразовать принятую систему координат. Обычно это диктуется соображениями удобства: упрощаются геометрические образы, нагляднее становятся аналитические модели и используемые при вычислениях алгебраические выражения.
Построение и использование специальных систем координат: полярных, цилиндрических и сферических диктуется геометрическим смыслом решаемой задачи. Моделирование при помощи специальных систем координат часто облегчают разработку и использование аналитических моделей при решении практических задач.
Результаты, полученные в Дополнении Главы 1, будут использоваться в линейной алгебре, большая часть – в математическом анализе и в физике.
Преобразование декартовых прямоугольных координат на плоскости и в пространстве.
При рассмотрении задачи построения системы координат на плоскости и в пространстве отмечалось, что систему координат образуют пересекающиеся в одной точке числовые оси: на плоскости требуются две оси, в пространстве – три. В связи с построением аналитических моделей векторов, введением операции скалярного произведения векторов и решением задач геометрического содержания было показано, что применение прямоугольных систем координат наиболее предпочтительно.
Если рассматривать задачу преобразования конкретной системы координат абстрактно, то в общем случае можно было бы допускать произвольное перемещение в заданном пространстве осей координат с правом произвольного переименования осей.
Мы будем исходить из первичного понятия системы отсчета, принятого в физике. Наблюдая движение тел, было обнаружено, что движение изолированного тела не может быть определено само по себе. Нужно иметь ещё хотя бы одно тело, относительно которого наблюдается движение, то есть изменение его относительного положения. Для получения аналитических моделей, законов, движения с этим вторым телом, как с системой отсчёта, связали систему координат, причём так, что система координат представляла собой твёрдое тело!
Так как произвольное перемещение твёрдого тела из одной точки пространства в другую может быть представлено двумя независимыми движениями: поступательное и вращательное, то варианты преобразования системы координат ограничили двумя движениями:
1). Параллельный перенос: следим только за одной точкой – точкой  .
.
2). Вращение осей системы координат относительно точки : как твёрдого тела.
Преобразование декартовых прямоугольных координат на плоскости.
 Пусть имеем на плоскости системы координат:
Пусть имеем на плоскости системы координат:  ,
,  и
и  . Система координат получается параллельным переносом системы . Система координат получается вращением системы на угол
. Система координат получается параллельным переносом системы . Система координат получается вращением системы на угол  , причём за положительное направление вращение принято вращение оси
, причём за положительное направление вращение принято вращение оси  против часовой стрелки.
против часовой стрелки.
Определим для принятых систем координат базисные векторы. Так как система получена параллельным переносом системы , то для обеих этих систем примем базисные векторы:  , причём единичные и совпадающие по направлению с осями координат ,
, причём единичные и совпадающие по направлению с осями координат ,  , соответственно. Для системы в качестве базисных векторов примем единичные векторы
, соответственно. Для системы в качестве базисных векторов примем единичные векторы  , совпадающие по направлению с осями
, совпадающие по направлению с осями  ,
,  .
.
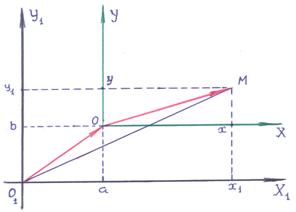 Пусть задана система координат и в ней определена точка
Пусть задана система координат и в ней определена точка  =
=  . Будем считать, что перед преобразованием имеем совпадающие системы координат и . Применим к системе координат параллельный перенос, определяемый вектором
. Будем считать, что перед преобразованием имеем совпадающие системы координат и . Применим к системе координат параллельный перенос, определяемый вектором  . Требуется определить преобразование координат точки . Воспользуемся векторным равенством:
. Требуется определить преобразование координат точки . Воспользуемся векторным равенством:  = +
= +  , или:
, или:
=  +
+  =
=  .
.
Проиллюстрируем преобразование параллельного переноса известным в элементарной алгебре примером.
☺☺
Пример Д – 1: Задано уравнение параболы:  =
=  =
=  . Привести уравнение этой параболы к простейшей форме.
. Привести уравнение этой параболы к простейшей форме.
Решение:
1). Воспользуемся приёмом выделения полного квадрата: =  , которое легко представить в виде: –3 =
, которое легко представить в виде: –3 =  .
.
2). Применим преобразование координат – параллельный перенос: =  . После этого уравнение параболы принимает вид:
. После этого уравнение параболы принимает вид:  . Это преобразование в алгебре определяют так: парабола = получена смещением простейшей параболы вправо на 2, и вверх на 3 единицы.
. Это преобразование в алгебре определяют так: парабола = получена смещением простейшей параболы вправо на 2, и вверх на 3 единицы.
Ответ: простейшая форма параболы: .
☻
 Пусть задана система координат и в ней определена точка = . Будем считать, что перед преобразованием имеем совпадающие системы координат и . Применим к системе координат преобразование вращения так, что относительно исходного своего положения, то есть относительно системы оказывается повёрнутой на угол . Требуется определить преобразование координат точки = . Запишем вектор в системах координат и :
Пусть задана система координат и в ней определена точка = . Будем считать, что перед преобразованием имеем совпадающие системы координат и . Применим к системе координат преобразование вращения так, что относительно исходного своего положения, то есть относительно системы оказывается повёрнутой на угол . Требуется определить преобразование координат точки = . Запишем вектор в системах координат и :  =
=  .
.
В то же время для любого угла имеем:  что достаточно просто наблюдаем из рисунка. Тогда: =
что достаточно просто наблюдаем из рисунка. Тогда: =  . Последнее может быть записано в виде: =
. Последнее может быть записано в виде: =  . Из векторного равенства получаем преобразование координат для точки :
. Из векторного равенства получаем преобразование координат для точки :
 (1)
(1)
Учитывая независимость движений поступательного и вращения относительно неподвижной точки, нетрудно записать результат одновременного применения преобразований координат: параллельный перенос и вращение:
 при =0 →
при =0 →  (2)
(2)
☺☺
Пример Д – 2: Задано уравнение линии:  =0 в виде:
=0 в виде:  =0. Привести уравнение этой линии к простейшей форме.
=0. Привести уравнение этой линии к простейшей форме.
Решение:
1). Для записанного уравнения линии в теории линий второго порядка достаточно просто устанавливается, что поворот системы координат на угол =  уничтожает слагаемое, содержащее произведение координат
уничтожает слагаемое, содержащее произведение координат  .
.
2). Применим преобразование вращения координат на угол :  После подстановки выражений координат
После подстановки выражений координат  через новые переменные
через новые переменные  , получим простейшее выражение для заданной линии:
, получим простейшее выражение для заданной линии:  =1. Из теории линий второго порядка следует, что получено простейшее (каноническое!) уравнение эллипса.
=1. Из теории линий второго порядка следует, что получено простейшее (каноническое!) уравнение эллипса.
Ответ: простейшая форма заданной линии: =1 – каноническое уравнение эллипса.
☻