Кинематика изучает движение материальных тел без учета их масс и действующих на них сил.
Движение тела - это изменение с течением времени его положения в пространстве по отношению к другим телам.
Траектория точки - множество положений движущейся точки в рассматриваемой системе отсчета.
Скорость точки характеризует быстроту изменения ее положения в пространстве.
Вектор скорости в каждый момент времени направлен по касательной к траектории движения, в сторону движения.
Ускорение точки характеризует изменение вектора скорости точки.
Нормальное ускорение - проекция полного ускорения на нормаль к траектории.
Касательное ускорение - проекция полного ускорения на касательную к траектории.
Касательное ускорение характеризует изменение скорости по модулю, нормальное - изменение скорости по направлению.
Нормальное ускорение всегда направлено к центру вращения. Касательное ускорение направлено по касательной к траектории по движению, если движение ускоренное, и против, если движение замедленное.
Поступательное движение - движение тела, при котором любая прямая, проведенная в теле, остается параллельной своему первоначальному положению.
При поступательном движении все точки твердого тела имеют одинаковые траектории, скорости и ускорения. Следовательно, поступательное движение твердого тела вполне определяется движением одной из его точек и к телу применимы все формулы кинематики точки.
Вращательное движение - движение, при котором, по крайней мере, две точки твердого тела остаются неподвижными; прямая линия, соединяющая эти две точки, называется осью вращения.
При вращательном движении тела его точки, находящиеся на разном расстоянии от оси вращения, имеют неодинаковые траектории, скорости и ускорения.
Вращательное движение тела характеризуется угловым перемещением.
Угловое перемещение тела  как функция от времени задает закон вращательного движения тела.
как функция от времени задает закон вращательного движения тела.
Угловая скорость тела равна первой производной углового
перемещения по времени 
Скорость точки тела прямо пропорциональна расстоянию точки от оси вращения. Вектор скорости направлен перпендикулярно радиусу в сторону  .
.
Таблица 3.1 - Сводная таблица формул поступательного и вращательного движения тела
| Кинематическая мера движения | Вид движения | ||
| Характер движения | поступательное | вращательное | |
| Перемещение | Неравномерное Равномерное Равнопеременное | S=f(t)
S = S0 + V • t

| 
|
| Скорость | Неравномерное Равномерное Равнопеременное | V = dS / dt V = const V = V0 + a • t | 
|
| Ускорение касательное | Неравномерное Равномерное | 
| 
|
| Ускорение касательное | Равнопеременное | 
| 
|
| Ускорение нормальное | Неравномерное Равномерное Равнопеременное | 
| 
|
| Полное ускорение | Неравномерное | 
| |
| Равномерное | a = an | ||
| Равнопеременное |
|
Угловое ускорение определяется первой производной от угловой скорости по времени или второй производной от углового перемещения

Для точки, совершающей сложное движение, различают:
- абсолютное движение точки - движение относительно неподвижной системы координат;
- относительное движение точки - движение относительно подвижной системы координат;
- переносное движение - движение подвижной системы координат относительно неподвижной.
Теорема: абсолютная скорость (ускорение) точки равна векторной сумме относительной и переносной скоростей (ускорений).

3.2 Расчетно-графическая работа №2 «Исследование кривошипно-ползунного механизма. Кинематический расчет»
Определить угловые и линейные скорости и ускорения точек звеньев механизма (табл. 3.2) в заданный преподавателем момент времени (t = 0,5 с; 1 с; 2 с) аналитическим и графическим методами. Варианты заданий выдаются преподавателем по таблице 3.2 и таблице 3.3.
Пример
Аналитическое решение
Для механизма, изображенного на рисунке 3.1, в заданный момент времени / = 10 с, по заданному уравнению движения первого звена (кривошипа)  , рад, определить линейные и угловые скорости и ускорения точек и звеньев механизма. Размеры звеньев r = 0,1 м, l = 0,3 м.
, рад, определить линейные и угловые скорости и ускорения точек и звеньев механизма. Размеры звеньев r = 0,1 м, l = 0,3 м.
Таблица 3.2 - Варианты кинематических схем механизмов к расчет-но-графической работе №2

| 
| ||

| 
| ||

| 
| ||

| 
| ||

| 
|
Таблица 3.3 - Значения параметров для расчетно-графической работы №2
| Номер вар. | Закон движения 
| r, mm | l,mm | Qnc | G3,H | А, мм 2 |
| t - 5 | ||||||
| t2- t + l | ||||||
| et | ||||||
| ln(t) | ||||||
| sin(t) | ||||||
| cos(t) | ||||||
| 1/t | ||||||
| 2 - 3t | ||||||
| 6 - t2 | ||||||
| - t3 |
Решение
1. Движение звена 1 определяется законом . Для расчетного времени t = 10 с положение звена определяется углом

или в градусах

что соответствует числу оборотов кривошипа 
Вычитая целое число оборотов из  , определяем угол положения
, определяем угол положения
кривошипа 
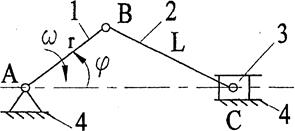
Рисунок 3.1 - Кривошипно-ползунный механизм
2. Вычерчиваем с соблюдением масштаба механизм в положении = 330°для момента времени t = 10 с (рис. 3.2).

Рисунок 3.2 - Положение механизма при  = 330°
= 330°
3. Угловая скорость первого звена

для t = 10 c 

Угловое ускорение первого звена

4. Определим кинематические параметры точки В. Скорость точки В рассчитывается по формуле

Ускорение точки В рассчитывается по формуле
Нормальное ускорение точки В рассчитывается по формуле


Касательное ускорение точки В рассчитывается по формуле


Полное ускорение точки В равно

5. Определим закон движения точки С.
Точка С движется возвратно-поступательно вдоль направляющих  . Определим закон движения точки С - перемещение S = f(t) как функцию от времени.
. Определим закон движения точки С - перемещение S = f(t) как функцию от времени.
Проецируя контур механизма АВСА на линию АС, получим

Подставляя в полученную формулу функцию , угла поворота кривошипа, получим функцию S = f (t) перемещения точки С от времени

6. Определим скорость точки С по формуле 


для момента времени t = 10 с

7. Определим ускорение точки С по формуле 
Получим зависимость
После приведения получаем зависимость
Для момента времени t = 10 с

Знак «-» означает, что ускорение и скорость точки С направлены в разные стороны.
Графическое решение
Определяем скорости точек механизма.
1. Вычерчиваем в масштабе кинематическую схему механизма для момента времени t = 10 с (рис. 3.3).

Рисунок 3.3 - Положение механизма при 
2. Угловая скорость кривошипа определяется по формуле
 ;
;
для момента времени t = 10 с
 .
.
3. Определим скорость точки В (рис. 3.3) по формуле
 ;
;
 м/с.
м/с.
4. Скорость точки С определяем с помощью векторного уравнения
 ,
,
где  - абсолютная скорость точки С;
- абсолютная скорость точки С;
 - скорость точки В (переносная скорость точки С);
- скорость точки В (переносная скорость точки С);
 - относительная скорость точки С относительно В.
- относительная скорость точки С относительно В.
Отмечаем подчеркиванием известные величины в этом уравнении. Вектор известен по величине и направлен по касательной к траектории движения точки В, т.е. перпендикулярно кривошипу АВ. Вектор по величине неизвестен, направлен вдоль направляющих  . Вектор по величине неизвестен, направлен перпендикулярно звену ВС по касательной к траектории относительного движения. В уравнении имеем два неизвестных, поэтому можем решить его графически.
. Вектор по величине неизвестен, направлен перпендикулярно звену ВС по касательной к траектории относительного движения. В уравнении имеем два неизвестных, поэтому можем решить его графически.
5. Решаем векторное уравнение графически. Для этого строим план скоростей (рис. 3.4). Масштаб плана скоростей
 ,
,
где  - отрезок на плане скоростей, изображающий вектор (выбирается произвольно).
- отрезок на плане скоростей, изображающий вектор (выбирается произвольно).

Рисунок 3.4- План скоростей
Построение плана скоростей ведем в следующем порядке:
- на свободном месте чертежа ставим точку полюса плана скоростей  ;
;
- из полюса откладываем известную скорость (длина вектора равна );
- в соответствии с векторным уравнением проводим линии действия векторов и . Вектор из конца вектора , а вектор из полюса .
Точка С пересечения линий действия векторов Vc и VCB определяет длину неизвестных векторов. Измерив длину отрезков Рус и cd, определяем модули скоростей:
 м/с;
м/с;
 м/с.
м/с.
Определение ускорений точек звеньев механизма (рис. 3.5).
6. Ускорение точки В кривошипа

7. Ускорение точки С

(3.4)

Рисунок 3.5 - Определение ускорений точек
8. Ускорение

9. Решаем векторное уравнение (3.4) графически (рис. 3.6).
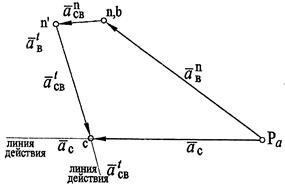
Рисунок 3.6- План ускорений
Масштаб плана ускорений определяем по ускорению 

10. Отрезки известных векторов ускорений

1 1. Строим план ускорений, откладывая отрезки известных векторов
и проведя линии действия векторов  и
и  . Точка С пересечения линий действия определяет величины неизвестных векторов. Измерив полученные отрезки, находим
. Точка С пересечения линий действия определяет величины неизвестных векторов. Измерив полученные отрезки, находим

Результаты аналитических и графических расчетов заносим в таблицу 3.4 и определяем погрешности в процентах
Таблица 3.4 - Расчет погрешностей вычислений
| Величина | Значение, определенное аналитически | Значение, определенное графически | Погрешность % |
| VC | 1,31м/с | 1,24м/с | 5,3 % |
| aC | 44,3 м/с2 | 42м/с2 | 5,2 % |
3.3 Контрольные вопросы
1. Дать определение траектории точки.
2. Какое направление имеет вектор скорости точки?
3. На какие составляющие раскладывают полное ускорение точки и куда они направлены?
4. Как определяется направление полного ускорения точки?
5. Какую размерность имеет ускорение?
6. Как определить, какое движение совершает тело - поступательное или вращательное?
7. Назовите параметры вращательного движения и их размерности.
8. Сформулируйте теорему о сложении скоростей.
9. Укажите дифференциальные зависимости параметров поступательного движения.
10. Укажите дифференциальные зависимости параметров вращательного движения.