Рисунок 1
Устройство сервопривода показано на рисунке 2. В его состав входит электродвигатель, редуктор с набором шестеренок, потенциометр (выполняет функцию датчика положения для обратной связи), электронная плата управления электродвигателем и корпус, в который заключено все содержимое. На этом же рисунке показан провод, посредством которого сервопривод питается и управляется. Он состоит из 3-х жил: питание «плюс», питание «минус» и провод, на который подается управляющий сигнал. На разных моделях сервоприводов провода могут иметь разный цвет. Но практически всегда провод питания «плюс» окрашен в красный цвет, а провод питания «минус» - в черный. В отношении же сигнального провода (для передачи управляющего сигнала) четких цветовых стандартов нет. У разных производителей сервоприводов сигнальный провод может быть белым, оранжевым или желтым.

Рисунок 2
Для управления такими двигателями принят стандарт управляющего сигнала. Он представляет собой постоянно повторяющиеся импульсы или, как мы говорим, череду импульсов (Рис. 3). Частота этих импульсов все время остается постоянной и составляет 50 Гц. Получается, что временной период импульсов (время между передними фронтами соседних импульсов) составляет 1с/50 = 0,02 секунды, т. е. 20 миллисекунд.
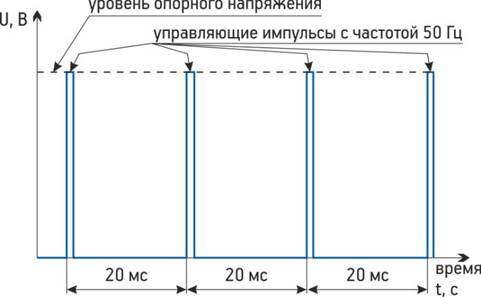
Рисунок 3
Угловое положение выходного вала сервопривода задается продолжительностью подаваемого импульса. Для пояснения на рисунке 4 показано приблизительное соотношение ширины импульса во временных координатах и угла поворота вала сервопривода. Управление поворотом вала сервопривода выполняется с помощью импульсов продолжительностью от 1 до 2 мс (миллисекунд).
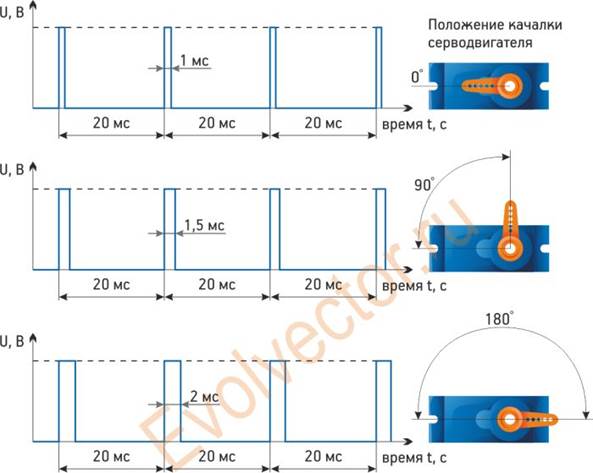
Рисунок 4
Как видно из графика, для управления сервоприводом используется сигнал с широтно импульсной модуляцией - ШИМ. Что такое ШИМ можно узнать изучив урок «Широтно импульсная модуляция».
Как ширина импульса превращается в угол вала на выходе?
Как указано на рисунке 2, в корпусе сервопривода присутствует еще и электронный модуль управления мотором. Подаваемый на сервопривод сигнал попадает на эту плату. А вот то, что происходит с этим сигналом дальше, показано на блок-схеме рисунок 5, которую мы проанализируем поэтапно. Каждый этап изображен прямоугольником или кружочком и пронумерован. Внутри этих прямоугольников изображены устройства, на которых происходит преобразование или обработка сигнала.

Рисунок 5
Итак, входной управляющие сигнал Sупр с ШИМ модуляцией приходит на специальную микросхему с логическими элементами, с помощью которой преобразуется в напряжение Uупр (этап №1). После этого сигнал Uупр (управляющее напряжение) поступает на элемент сравнения напряжений. Данный элемент называется сумматором, но на самом деле он из входного сигнала Uупр вычитает напряжение Uобр (напряжение обратной связи), приходящее через обратную связь с переменного резистора (этап №2).
Получившаяся разница Uкорр (корректирующее напряжение) усиливается встроенным усилителем (этап №3) и подается на электродвигатель. Мотор вращается (этап №4) и приводит в движение выходной вал сервопривода, а вместе с ним и датчик обратной связи в виде потенциометра. При вращении ручки потенциометра изменяется напряжение и получается, что поворот вала преобразуется в напряжение Uобр (этап №5). Это напряжение Uобр сравнивается (снова этап №2) с напряжением Uупр, и разница в виде Uкорр снова идет на усилитель (этап №3) и так далее. Сигнал «ходит» по цепи с обратной связью до тех пор, пока не выполнится соотношение Uупр = Uобр. Тогда Uкорр станет равно 0, и двигатель остановится. Произойдет это тогда, когда вал сервопривода займет положение, соответствующее входному управляющему сигналу Sупр.
Обобщим все сказанное. Вал сервопривода механически соединен с ручкой потенциометра. Из-за этого вместе с поворотом вала сервопривода поворачивается потенциометр, в результате чего изменяется его сопротивление и выходное напряжение Uобр. Соответственно, выходное напряжение с потенциометра Uобр прямо зависит от угла поворота сервопривода. Одновременно входной в сервопривод сигнал Sупр с продолжительностью импульсов от 0,001 до 0,002 секунды задает уровень напряжения Uупр, которое определяет угол на который должен повернуться вал сервопривода. Остановка электродвигателя в момент, когда вал сервопривода именно в нужном положении, достигается за счет вычитания из сигнала Uупр сигнала обратной связи Uобр. А усилитель этапа №3 необходим для того, чтобы на электродвигатель подавалось усиленное напряжение и двигатель переводил вал сервопривода в заданное положение максимально быстро.