1. Внимательно ознакомиться с описанием лабораторной установки.
2. Изучить правила техники безопасности при выполнении лабораторной работы.
3. Изучить работу электрической схемы электронного расходомера топлива (рис. 2).
4. Произвести пятьдесят замеров расхода топлива. Во время опыта замерить объем топлива между верхним и нижним уровнями в мерном сосуде.
5. Определить относительную ошибку измерения расхода.
6. Построить гистограмму распределения абсолютной ошибки рас
Обработка экспериментальных данных
Результаты замеров свести в таблицу.
| п/п | Ti | Qi | ΔQi | ΔQi2 | Примечание |
| …. | |||||
| …. | |||||
Относительная ошибка измерения расхода
 |

где Zp - квантиль нормального распределения (Z0,9 = 1,64; Z0.95 = 1.96; Z0.997 = 3). Средний расход, см3 /с,

Среднее квадратическое отклонение расхода, см3 /с, 
| где |

|
 |
Текущий расход, см3 /с,
где Ti- время истечения топлива, с; V - объем топлива в мерном сосуде, см3.
Шаг гистограммы определяется по формуле Стеджерса, см3/с, размах экспериментальных данных, см3 /с.
Содержание отчета
1. Цель работы.
2. Краткие теоретические сведения.
3. Принципиальная электрическая схема электронного расходомера топлива (рис. 2).
4. Экспериментальные данные.
5. Относительная ошибка измерения расхода при различных уровнях доверительной вероятности.
6. Гистограмма распределения ошибки расхода.
Вопросы для самопроверки
1. На какие характеристики автомобиля влияет расход топлива?
2. Какие диагностические признаки неисправностей системы питания двигателя автомобиля вам известны?
3. Какие типы расходомеров используются при замерах расхода топлива автомобильным двигателем?
4. На каких режимах работы автомобильного двигателя производится измерение расхода топлива?
5. Каковы основные источники погрешностей и определении расхода топлива при неавтоматизированном способе измерения?
6. Какие преимущества дает автоматизация измерения расхода топлива?
7.. Как определяется относительная ошибка измерения расхода?
Библиографический список
1. Аринин И.Н. Техническая диагностика на предприятиях автомобильного транспорта. Ярославль: Верхневолжское изд-во, 1974. 143 с.
2. Райков И.Л. Испытание двигателей внутреннего сгорания. М.: Высш.ш. 1975. 320 с.
3. З.Яковлев Л.Г. Приборы контроля работы силовых установок. М.: Машиностроение. 1969. 300с.
Лабораторная работа №6
Параметрические чувствительные элементы
Цель работы: Изучение принципов работы параметрических датчиков. Снятие экспериментальных характеристик датчиков (реостатного, индуктивного, емкостного).
Общие указания
Электрические чувствительные элементы находят широкое применение в системах автоматизация производственных процессов на автомобильном транспорте. Наиболее характерными областями их применения являются: диагностика технического состояния узлов и агрегатов автомобиля; измерение газового состава производственных помещений, стоянок автомобильного транспорта, городского воздушного бассейна; контроль за состоянием и работой отдельных систем, механизмов, агрегатов я автомобиля в целом и т.д.
Электрические чувствительные элементы подразделяются на две группы: параметрические и генераторные. Параметрические чувствительные элементы преобразуют входную физическую величину X в изменение параметра электрической цепи (сопротивление R, емкость С, индуктивность L и взаимоиидуктивность М). Для функционирования параметрических чувствительных элементов необходим источник питания.
Реостатные и потенциометрические чувствительные элементы применяются в основном для измерения перемещений и сил, под действием которых изменяется сопротивление элемента.
Омическое сопротивление проводника в Ом определяется выражением R = pl/S, где р - удельное сопротивление материала проводника, Ом.м; l - общая длина проводника, м; S - площадь поперечного сечения, м2.
Поскольку р, l, S зависят от деформаций, механических напряжений, усилий, давлений, перемещений и других параметров, то R является сложной функцией этих параметров. Для измерения какого-либо одного из них, например усилия, необходимо, чтобы сопротивление было функцией только усилия при постоянстве всех остальных.
Наибольшее распространение получили проволочные чувствительные элементы, схема и конструкция которых приведены на рис. 1, а. На неподвижный каркас 1 плотно, виток к витку, наматывают изолированный провод, который образует обмотку 2 с сопротивлением R. Обмотка включается в цепь постоянного напряжения U. На обмотке очищается от изоляции "контактная дорожка", по которой перемещается щетка 3, жестко закрепленная в щеткодержателе 4.
Каркас изготавливается из пресс-порошка, эбонита, анодированного алюминия и других изоляционных материалов. Наиболее распространенными материалами провода являются манганит, константен, а также сплавы на базе благородных металлов. Диаметр провода изменяется в пределах 0,03 - 0,1 мм для прецизионных реостатов и потенциометров, а в грубых реостатах достигает 0,3 мм.
Статистической характеристикой реостатного чувствительного элемента является зависимость Rвых=f(x) а потенциометрического -зависимость Uвых=f(x) где X - перемещение. Ступенчатый вид характеристики (рис. 1, б, в) объясняется тем, что при движении щетки вдоль обмотки в момент перехода от одного витка к другому сопротивление или напряжение изменяется скачком. Так, для линейного реостата максимальная величина витковой погрешности определяется выражением ΔR=0.5r=0.5R/w, где R - сопротивление реостата; r - сопротивление одного витка; w - число витков.
Для нелинейного потенциометра витковая погрешность вычисляется по наиболее крутому участку характеристики: ΔU=U1/2w, где
U1 - приращение выходного напряжения на наиболее крутом участке характеристики; w - число витков на этом участке.
Нелинейные характеристики обычно получают путем профилирования каркаса по определенному закону или шунтированием отдельных участков линейного потенциометра.
Емкостные чувствительные элементы нашли применение для измерения перемещений (линейных и угловых), усилий, давлений, уровня, расходов, крутящих моментов, температуры и других физических величин. Принцип действия емкостных чувствительных элементов состоит в том, что замеряемая величина может быть связана с одним из параметров, определяющих емкость конденсатора, а именно, диэлектрической постоянной среды, эффективной площадью электродов, расстоянием (зазором) между электродами, диэлектрическими потерями, а также электростатической силой напряжения электродов.
Емкость плоского конденсатора (рис. 2, а) равна C=εS/δ, где С - емкость, Ф; ε- диэлектрическая проницаемость среды между электродами конденсатора, равная ε=ε0*εr;
ε0= 8,85*10-12, Ф/м - абсолютная диэлектрическая проницаемость вакуума; εr - относительная диэлектрическая проницаемость среды между электродами (для воздуха εr = 1; δ - расстояние между электродами, м.
Емкость вращающегося конденсатора (рис. 2, б) равна
 |
где α - угол поворота электродов конденсатора, рад; Smax - максимальная площадь электродов, м2; Cmax - максимальная емкость, Ф.
Преимуществами емкостных чувствительных элементов являются высокая чувствительность, малые габаритные размеры и простота конструкции. Индуктивные чувствительные элементы нашли широкое применение для измерения перемещений, усилий, давлений, скоростей, крутящих моментов и других физических величин, а также в качестве источника ультразвуковых колебаний.
Принцип их действия основав на том, что индуктивность и полное сопротивление зависят от параметров магнитной цепи. Если связать измеряемую величину (например, усилие или угловое перемещение) с одним из параметров магнитной цепи, то по изменению индуктивности или сопротивления можно судить об этой величине.
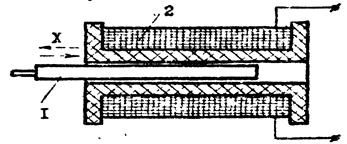
Для измерения больших перемещений (до десятков миллиметров) используется индуктивный датчик, показанный на рис. 3. На сердечник 1, расположенный в обмотке 2, воздействует измеряемая неэлектрическая величина х, вызывающая его перемещение. Вследствие этого изменяется полное сопротивление катушки, в следовательно, сигнал на входе элемента.
Полное сопротивление обмотки индуктивного датчика равно

где R - активная составляющая сопротивления, Ом; v - угловая электрического поля, рад/с; L - индуктивность, Гн.
| |||
| Рис.1. Реостатный потенциометрический чувствительный элемент: а – конструкция; б – линейная характеристика; в – нелинейная характеристика. |


|
| Рис.2. Ёмкостный чувствительный элемент: а – для линейных перемещений; б – для угловых перемещений. |
| |||
| Рис.3. Индуктивный чувствительный элемент |
Индуктивность обмотки датчика определяется выражением

Где ω - число витков обмотки датчика; Ф - магнитный поток, Вб;
(I - ток, протекающий по обмотке датчика, А; Rст - магнитное сопротивление сердечника, Гн; Rв - магнитное сопротивление воздушного зазора, Гн-1.
Поскольку при перемещении сердечника внутри обмотки индуктиввого датчика происходит изменение соотношения между Rст и Rв, до которым замыкается магнитный поток, происходит изменение индуктивности L, а следовательно, и полное сопротивление датчика Z.