МОДЕЛИРОВАНИЕ РАБОТЫМИКРОАКСЕЛЕРОМЕТРА
В СИМУЛИНК
по курсу«Сенсорные устройства, системы и робототехнические системы
для экстремальных сред»
Выполнил:
студент гр. РТмо1-3
Проверил: Матвеев А.И.
Цель работы – моделирование работы акселерометра компенсационного типа в системе Simulink, приобретение практических навыков использования функций системы.
bdclose all
set_param(0, 'CharacterEncoding', 'windows-1252')
Передаточная функция акселерометра компенсационного типа
Рассмотрим схему для микроакселерометра компенсационного преобразования.
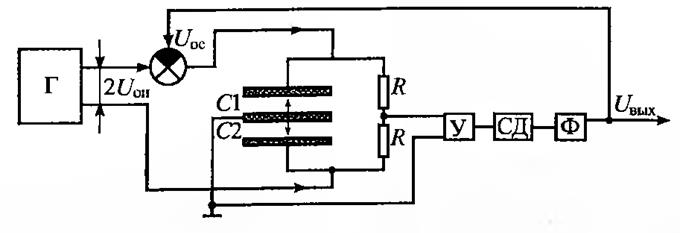 Рис. 1– Блок-схема измерительной цепи осевого акселерометра компенсационного типа (с обратной связью)
Рис. 1– Блок-схема измерительной цепи осевого акселерометра компенсационного типа (с обратной связью)
Последовательность преобразований физических величин в процессе измерения ускорения осевым акселерометром без обратной связи представлен в виде блок-схемы измерительной цепи (рис. 1), на которой каждый элемент преобразования представлен в виде звена с соответствующей передаточной функцией.

|
Рис. 2 Блок-схема измерительной цепи осевого акселерометра без обратной связи
Передаточная функция измерительной цепи равна
 . (1)
. (1)
Величина m инерционной массы ЧЭ является коэффициентом передачи первого звена, на вход которого поступает измеряемое ускорение ах, а выходом является инерционная сила F. На вход второго звена Wy (s), передаточная функция которого определяется зависимостью
 , (2)
, (2)
 поступает инерционная сила F, а выходом является перемещение y инерционной массы. Выходом преобразователя перемещений с передаточной функцией W п (s) является напряжение
поступает инерционная сила F, а выходом является перемещение y инерционной массы. Выходом преобразователя перемещений с передаточной функцией W п (s) является напряжение  , которое затем посредством активного фильтра с передаточной функцией W ф(s) преобразуется в выходное напряжение U вых. Рассчитаем напряжение на выходе измерительного моста с двумя конденсаторами C1, C2.
, которое затем посредством активного фильтра с передаточной функцией W ф(s) преобразуется в выходное напряжение U вых. Рассчитаем напряжение на выходе измерительного моста с двумя конденсаторами C1, C2.
Емкости моста определяются по формулам
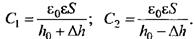 . (3)
. (3)
Полагая  ,
,  , найдем напряжение на выходе моста
, найдем напряжение на выходе моста
 .
.
Откуда передаточная функция преобразователя перемещений равна
 .
.
Передаточная функция фильтра может быть различной в зависимости от требований. Для простоты будем полагать  .
.
В акселерометрах компенсационного преобразования (компенсационные акселерометры) сила F, инициируемая ускорением, воспринимаемым инерционным элементом (ИМ), уравновешивается силой  поступающей от цепи обратной связи, имеющей, как правило, электростатическую, магнитоэлектрическую или электромагнитную природу. Поэтому компенсационные акселерометры называют также акселерометрами уравновешивающего преобразования. На рис. приведены блок-схемы измерительных цепей акселерометров с магнитоэлектрической обратной связью.
поступающей от цепи обратной связи, имеющей, как правило, электростатическую, магнитоэлектрическую или электромагнитную природу. Поэтому компенсационные акселерометры называют также акселерометрами уравновешивающего преобразования. На рис. приведены блок-схемы измерительных цепей акселерометров с магнитоэлектрической обратной связью.
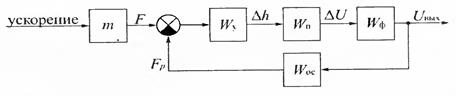
Рис.3. Схема микроакселерометра компенсационного типа с магнитоэлектрической обратной связью.
Используя (1) и полагая Wф =1, запишем передаточную функцию акселерометра с обратной связью:
 , (4)
, (4)
где  – передаточная функция цепи обратной связи, Wy , W п – передаточные функции второго звена, преобразователя перемещений, цепи обратной связи. Пусть передаточные функции в (2) имеют вид
– передаточная функция цепи обратной связи, Wy , W п – передаточные функции второго звена, преобразователя перемещений, цепи обратной связи. Пусть передаточные функции в (2) имеют вид
 ,
,  , . (5)
, . (5)
В акселерометрах с обратной связью второе слагаемое в знаменателях передаточных функций обычно значительно больше единицы:
 .
.
Заметим, что это правило затруднительно выполнить для акселерометров с электростатической обратной связью. Для передаточной функции акселерометра после подстановки (3) в (2) получим
 . (6)
. (6)
В статическом режиме
 .
.
Сравнивая с коэффициентом передачи без обратной связи
 .
.
отметим, что максимальное измеряемое ускорение увеличивается в  раз.
раз.