Передаточные функции замкнутых САУ
Замкнутые САУ с и с т е м ы с о б р а т н о й с в я з ь ю и л и с и с т е м ы у п р а в л е н и я п о о т к л о н е н и ю обеспечивают принципиально неограниченную точность управления и представляют собой основной тип САУ.
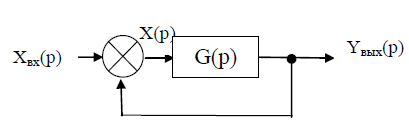
В схеме САУ, изображенной на рисунке 1 на управляющее устройство поступают три вида информации: информация о величине X, определяющей состояние объекта, информация о величине Х3, задающей цель управления, информация от F – возмущениях, нарушающих режим работы объекта.
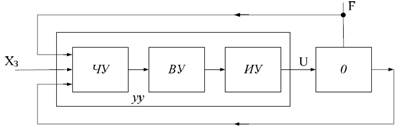
Рисунок 1
В замкнутых САУ на вход управляющего устройства подаются задающее воздействие Х3 и выходная величина объекта X. Исходя из величины Х3, управляющее устройство определяет соответствующее требуемое значение X и, имея информацию о текущем значении X, обеспечивает необходимое соответствие между X и Х3 путем воздействия на объект. Управляющее устройство стремится ликвидировать все отклонения X от его значения, определяемого заданием Х3, независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
Пример Системы управления напряжением синхронного генератора замкнутая система управления по отклонению представлена на рисунке 2
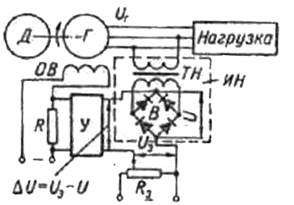
Рисунок 2. Замкнутая система управления по отклонению управления напряжением синхронного генератора
При анализе САУ в результате структурных преобразований, чаще всего стремятся получить одноконтурную САУ, так как методы анализа и синтеза подобных систем разработаны наиболее полно.
Рассмотрим простейшую одноконтурную САР (рисунок3). Она представляет собой систему с главной отрицательной обратной связью. Произведем размыкание системы в точке «А».
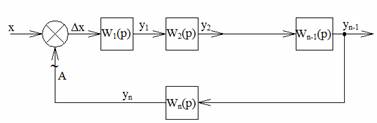
Рисунок 3
Передаточной функцией разомкнутой системыWp(p)называется отношение изображения по Лапласу сигнала обратной связи к изображению по Лапласу сигнала ошибки при нулевых начальных условиях, т.е.
 (1)
(1)
Следует иметь в виду, что для разомкнутой системы X(t)=DX(t) и все возмущающие воздействия считаются равными нулю.
Таким образом, передаточная функция разомкнутой системы равна произведению передаточных функций отдельных звеньев разомкнутого контура, включая передаточную функцию элемента обратной связи.
Рассмотрим случай, когда к САУ приложено несколько возмущающих воздействий
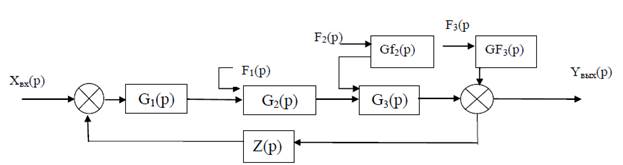
Прямая цепь системы состоит из передаточных функций G1(p)….
На входы двух последних звеньев поступает возмущающее воздействие F1(p) и F2(p) суммирующиеся с соответствующими величинами предыдущих звеньев. Возмущение F3(p) действует на выходную величину системы, что обозначено на схеме элементом суммирования. При этом принципиально важно, что место приложения F3(p) охвачено ОС, что т.е. на звено Z(p) поступает выходная величина системы, с учетом действия F3(p) таким образом управляющая величина системы, искаженная F3(p) корректируется ОС. Возмущающее воздействие F2(p) и F3(p) поступает на вход звеньев прямой цепи через дополнительные звенья с передаточными функциями Gf2(p) и Gf3(p), которые отражают характер зависимости системы от конкретного возмущающего воздействия. Определим зависимость САУ от возмущающих воздействий. В силу линейности рассматриваемых систем управления к ней применим принцип наложения, дающий возможность определить общую реакцию системы, т.е. изменение выходной величины как сумма частных реакций от каждого из внешних воздействий в отдельности.
Пусть Xвых(р)=0; F2(p)=0; F3(p)=0 определим зависимость Yвых от F1(p). На вход звена G2(p) действует сумма сигналов F1(p)+G1(p)[0-Z(p)Yвых(p)], которая, пройдя звенья G2(p) и G3(p), доставит на выходе значение:
Yвых(p)=G2(p)G3(p)[F1(p)-G1(p)Z(p)Yвых(р)] (1)
Решив уравнение относительно Yвых(р) получим:
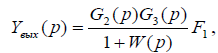
где
W(p)=G1(p)G2(p)G3(p)Z(p) полученный результат обобщим в виде следующего правила:
Операторное выражение выходной величины системы равно дроби, числитель которой есть произведение изображения внешнего воздействия на передаточные функции звеньев, включенных последовательно между точкой приложения внешнего воздействия и выхода системы, а знаменатель, это увеличенное на одну передаточную функцию разомкнутой системы.
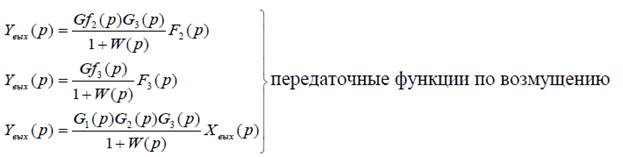
При одновременном воздействии всех возмущений выходная величина системы есть сумма полученных частных воздействий.
 Из выражения можно получить выражение передаточной функции по выходной величине и по ошибке. Особенностью является передача Yвых(р) к элементу сравнения, т.е. на вход системы с коэффициентом передачи равным единице.
Из выражения можно получить выражение передаточной функции по выходной величине и по ошибке. Особенностью является передача Yвых(р) к элементу сравнения, т.е. на вход системы с коэффициентом передачи равным единице.
При анализе САУ, особенно следящих, возникает необходимость анализа поведения ошибки управления. Для этого составляют передаточную функцию относительно ошибки управления.
Передаточной функцией замкнутой системы по ошибке регулирования называется отношение изображения по Лапласу ошибки регулирования к изображению по Лапласу управляющего воздействия. Ошибка регулирования в САР выявляется после узла сравнения. Основным видом внешних воздействий в следящей системе считается входное управляющее воздействие Xвых(р) отрабатывают систему с некоторой ошибкой рассогласования.
Определение передаточной функции по ошибке рассогласования:
X(p)=Xвх(p)-Yвых(p)
Учитывая, что Z(p)=1
W(p)=G(p), G(p)-передаточная функция прямой цепи
W(p)- передаточная функция разомкнутой системы, которая будет иметь вид:
*Wз(p)= - передаточная функция системы по выходной величине. 
В силу линейности преобразований Лапласа операторное изображение ошибки входного и выходного сигнала связаны межде собой также как и оригиналы.
X(p)=Xвх(p)-Yвых(p); Yвых(p)=Xвх(p)-X(p) **
Подставим ** в *, получим:
 выражение передаточной функции по ошибке
выражение передаточной функции по ошибке
Вопросы самоконтроля:
1. Дать порядок расчета передаточной функции системы с последовательным соединением звеньев автоматики.
2. Дать порядок расчета передаточной функции системы с параллельным соединением звеньев автоматики.
3. Дать порядок расчета передаточной функции системы с последовательно-параллельным соединением звеньев автоматики.
4. Дать порядок расчета передаточной функции системы по возмущающему воздействию.
5. Дать порядок расчета передаточной функции системы по ошибке.