Задание:
Динамические свойства объекта регулирования по каналу регулирующего воздействия определены импульсной характеристикой.

| |||||||||||||||||

|
Регулируемая величина — температура перегретого пара котельного агрегата. Импульсная характеристика получена в результате нанесения возмущения, созданного скачкообразным уменьшением и последующим скачкообразным увеличением через  подачи конденсата на впрыск в пароохладитель на величину
подачи конденсата на впрыск в пароохладитель на величину  , измеренную в процентах хода регулирующего органа (%
, измеренную в процентах хода регулирующего органа (%  ). Максимальный расход конденсата на впрыск, соответствующий 100%
). Максимальный расход конденсата на впрыск, соответствующий 100%  , составляет 6 т/час. Номинальная температура перегретого пара 4000 С. Изменение регулируемой величины (в отклонениях от номинального значения) в результате импульсного возмущающего воздействия, задано в безразмерном виде таблицей 1.
, составляет 6 т/час. Номинальная температура перегретого пара 4000 С. Изменение регулируемой величины (в отклонениях от номинального значения) в результате импульсного возмущающего воздействия, задано в безразмерном виде таблицей 1.
Таблица 1
1. Получение импульсной кривой
Исходные данные:
Тип задания №1
ПИД-регулятор
tимп= 60 секунд;
xвх. имп = 10% х.р.о.
at = 10 секунд
aθ = 2 градусов
М = 1,55
xвх 100% х.р.о. = 6 тонн/час
tпара= 400 
Так как изменение регулируемой величины задано в безразмерном виде, нужно получить импульсную характеристику в размерном виде:
t =  · at; θ=
· at; θ=  ·аθ, получим:
·аθ, получим:

 Импульсная характеристика:
Импульсная характеристика:
| t, сек | |||||||||||||||||
| θ, град |
Построим график импульсной характеристики:

Определим динамические параметрыобъекта (k, T, τ) по импульсной характеристике:


σмакс=30
τ=35 с
Импульсный входной сигнал:

 =60 ∙ 10=600
=60 ∙ 10=600
Постоянная времени:

Коэффициент усиления:

 – максимальное отклонение регулируемой величины;
– максимальное отклонение регулируемой величины;
– площадь, описываемая кривой изменения возмущения;
 – площадь, описываемая кривой изменения регулируемой величины.
– площадь, описываемая кривой изменения регулируемой величины.

Смоделируем процесс в Matlab:


2. Перестроение импульсной кривой в кривую разгона и определение параметров объекта
Для перестройки импульсной характеристики  в кривую разгона h(t) разбиваем наблюдаемое время на интервалы и складывая ординаты графиков
в кривую разгона h(t) разбиваем наблюдаемое время на интервалы и складывая ординаты графиков  и h(t) по формуле h(t) = h(t)i-1 +
и h(t) по формуле h(t) = h(t)i-1 +  (t)i, предварительно интерполируя импульсную характеристику i.
(t)i, предварительно интерполируя импульсную характеристику i.
Перестроим импульсную кривую в кривую разгона и определим параметры объекта при tимп=60 с, по правилу:
 ;
;
T ≤ t ≤ 2T
| t, сек | |||||||||
| h, град |
Отыщем точку перегиба методом Ольденбурга-Сарториуса
Для упрощения задачи идентификации модели определим предварительно время запаздывания путем графического решения уравнения
y(τ)=Δ=0.05y(Тп)
Время запаздывания τ= 42с
Рассчитаем параметры k, τ, Tc,Ta, T1,T 2
Коэффициент усиления регулируемого объекта находим как отношение установившегося значения выхода к значению входа:
К =106/10 = 10,6
Находим точку перегиба графика переходной функции и определяем величины
Ta=72, Tc=38, Tc/Ta=0,53.
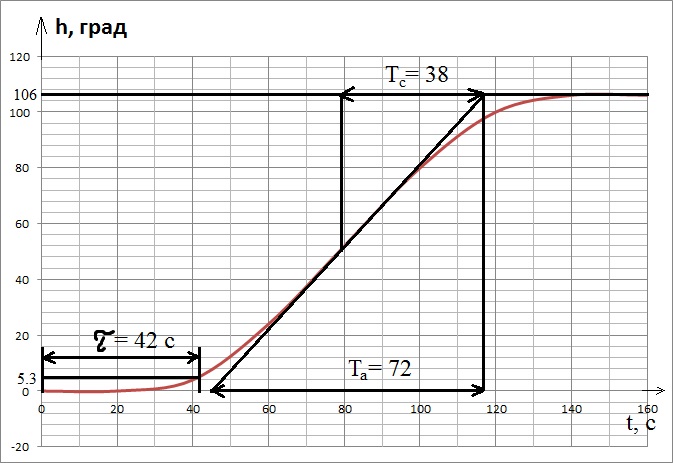
С помощью диаграммы Ольденбурга–Сарториусапо известной величине Tc/Ta находим постоянные времени:

T1/Ta =0,37
T2/Ta =0,37
Т1 = 0,37 ∙ Ta=26,64
Т2 =0,37 ∙ Ta=26,64
а1* = Т1+Т2=53,28
а2* =Т1∙ Т2 =709,69
Идентифицированная модель динамики:
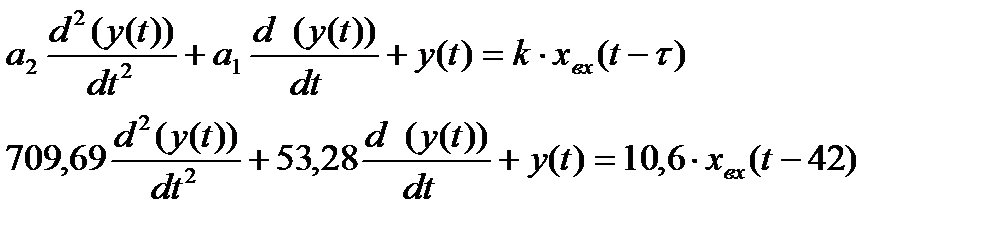
Получили передаточную функцию в дифференциальном виде.
Получим передаточную функцию:


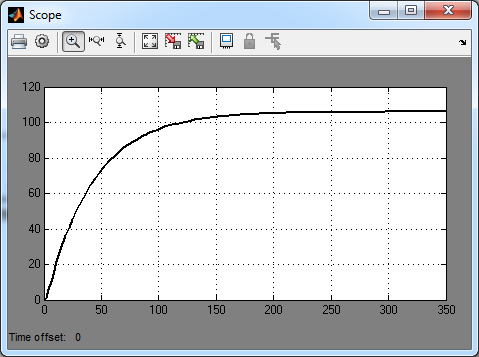
Смоделируем процесс в Matlab:

Получили кривую разгона:

3. Определение по кривой разгона «методом площадей» передаточной функции регулируемого объекта  , при помощи программы simou.exe
, при помощи программы simou.exe


Модель №1

W(s) = 
Исходные данные для расчета:
Параметры передаточной функции:
Коэффициент усиления K = 10.6
Запаздывание tau = 0
Коэффициенты числителя (степень m = 0):
b[0] = 1
Коэффициенты знаменателя (степень n = 1):
a[0] = 1 a[1] = 41.13208
Величина входного сигнала х = 10
Модель №2

W(s)= 
Исходные данные для расчета:
Параметры передаточной функции:
Коэффициент усиления K = 10.6
Запаздывание tau = 0
Коэффициенты числителя (степень m = 0):
b[0] = 1
Коэффициенты знаменателя (степень n = 2):
a[0] = 1.00000 a[1] = 41.13208 a[2] = 554.74071
Величина входного сигнала х = 10
Модель №3

W(s)= 
Исходные данные для расчета:
Пареметры передаточной функции:
Коэффициент усиления K = 10.6
Запаздывание tau = 0
Коэффициенты числителя (степень m = 0):
b[0] = 1
Коэффициенты знаменателя (степень n = 2):
a[0] = 1.00000 a[1] = 41.13208 a[2] = 554.74071 a[3] = -205.50298
Величина входного сигнала х = 10
4. Построим и сравним полученные переходные характеристики передаточных функций с помощью пакета Simulink.

Сравниваем полученные переходные характеристики передаточных функций:

5. Представление динамической модели объекта соединением типовых динамических звеньев, смоделировать объект на базе имитационного моделирования (Simulink), получить кривые разгона и сравнить их с рассчитанной.
Кривая, полученная методом Ольденбурга-Сарториуса:
W(p)1 = 


Кривая, полученная методом интегральных площадей (Симою):
W(p)2 = 

Кривая, полученная методом интегральных площадей (Симою):
W(p)3 = 


Кривая, полученная методом интегральных площадей(Симою):
W(p)4 =  =
= 


6. Частотные характеристики объекта регулирования (АФХ, АЧХ и ФЧХ):
W(p)= 
Расчет частотныххарактеристик.
Исходные данные для расчета
Параметры передаточной функции:
| Коэффициент усиления | K = 10,6 |
| Запаздывание | tau = 40 |
| Коэффициенты числителя | b[0] = 1 |
| Коэффициенты знаменателя | a[0] = 1 a[1] = 41,13 a[2] =554,74 |
Вид передаточной функции:
W(p)=
Параметры расчета:
Расчет нормальных частотных характеристик.
| Количество точек | N = 11 |
| Начальная частота | w0 = 0 |
| Шаг по частоте | dw = 0,02 |
Результаты расчета:
Частотные характеристики.
АФХ – амплитудно-фазовая характеристика

АЧХ - амплитудно-частотная характеристика

ФЧХ – фазо-частотная характеристика

Частота ReImA(w) fi(w)
0.02000 -0.39674 -9.35302 9.36143 267.57109
0.03000 -5.79003 -5.46256 7.96016 223.33307
0.04000 -6.42310 -0.25076 6.42800 182.23568
0.05000 -4.13699 2.92319 5.06554 144.75498
0.06000 -1.39407 3.73059 3.98255 110.48997
0.07000 0.61714 3.10068 3.16150 78.74337
0.08000 1.67466 1.91800 2.54621 48.87482
0.09000 1.95205 0.72571 2.08258 20.39351
0.10000 1.71568 -0.21232 1.72877 -7.05463
0.11000 1.20990 -0.80756 1.45465 -33.72149
0.12000 0.62347 -1.07068 1.23898 -59.78730
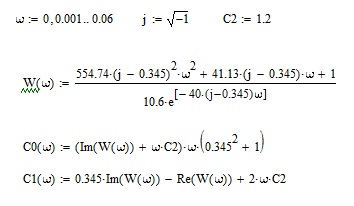
7. Для заданного регулятора заданным методом рассчитаем оптимальные значения параметров настройки, обеспечивающих заданный запас устойчивости системы. Расчет параметров ведется по расширенным частотным характеристикам.
Передаточная функция объекта управления имеет вид:
Wо(p)=
Передаточная функция регулятора:

Необходимо подобрать оптимальные значения параметров настройки (С1, С0), чтобы они обеспечивали заданный запас устойчивости системы.
Необходимо произвести подстановку  в характеристическое уравнение замкнутой системы и выделить действительную и мнимую части полинома.
в характеристическое уравнение замкнутой системы и выделить действительную и мнимую части полинома.
Найдемm:








Из двух корней m1 и m2 выбираем меньший. То есть принимаем m=0,345.
Wо(m,jω)= 
ПИД-регулятор:
С0=ω(m2+1)·(Im· (ω) + ω·C2);
C1=m·Im·(ω) –Re·(ω) + 2m·ω·C2.
Примем С2=0,1.
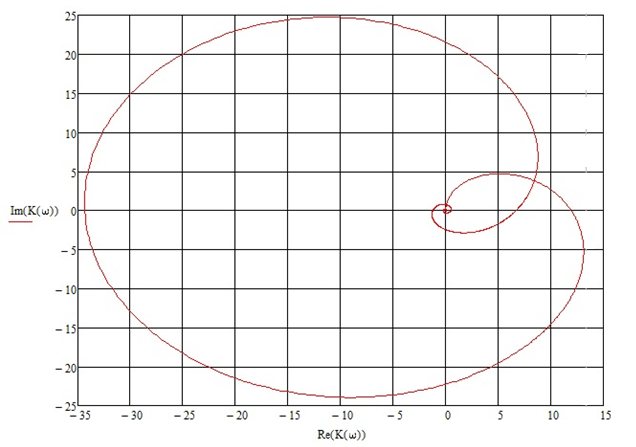
Строим график, отображающий зависимость C0(С1):

Строим зависимость  и определяем
и определяем  и
и  следующим образом: находим на кривой
следующим образом: находим на кривой  точку максимума, выбираем точку правее нее.
точку максимума, выбираем точку правее нее.

Схема полученной системы регулирования:

| Значение настройки регулятораС1 | Значение настройки регулятора С0 | Интегральный критерий качества I |
| 0,045 | 0,00144 | |
| 0,050 | 0,001428 | |
| 0,055 | 0,001378 | |
| 0,060 | 0,001268 | |
| 0,065 | 0,000919 |
Примем С2=0,5.
Строим график, отображающий зависимость C0(С1):

Построим зависимость и определим и следующим образом: находим на кривой точку максимума, выбираем точку правее нее.

Схема полученной системы регулирования:

| Значение настройки регулятораС1 | Значение настройки регулятора С0 | Интегральный критерий качества I |
| 0,07 | 0,001686 | |
| 0,075 | 0,001675 | |
| 0,08 | 0,001637 | |
| 0,085 | 0,001557 | |
| 0,09 | 0,001349 | |
| 0,092 | 0,001124 |
Примем С2=1,2.
Строим график, отображающий зависимость C0(С1):
Строим зависимость и определяем и следующим образом: находим на кривой точку максимума, выбираем точку правеенее.

Схема полученной системы регулирования:

| Значение настройки регулятораС1 | Значение настройки регулятора С0 | Интегральный критерий качества I |
| 0,12 | 0,002199 | |
| 0,125 | 0,002187 | |
| 0,13 | 0,002153 | |
| 0,135 | 0,002069 | |
| 0,14 | 0,001931 |
| С0 | С1 | С2 | I |
| 0,06 | 0,001268 | 0,1 | |
| 0,09 | 0,001349 | 0,5 | |
| 0,125 | 0,002187 | 1,2 |
Из таблицы видно, что наилучшими свойствами будет обладать ПИД-регулятор с настройками: С0=0,09, С1=0,001349 и С2=0,5 при рабочей частоте ω=0,031 рад/с.
График переходного процесса полученной системы регулирования:

8. Составим структурную схему системы регулирования (при найденных оптимальных настройках регулятора). Получим передаточную функцию замкнутой системы относительно внешнего возмущающего воздействия.
В качестве передаточной функции объекта относительно возмущающего воздействия возьмем передаточную функцию  , определенную в п.1.
, определенную в п.1.




Передаточная функция замкнутой системы по возмущающему воздействию:

9. Расчет и построение КЧХ замкнутой системы относительно возмущающего воздействия.

Делаем подстановку p =  , выделяем действительную и мнимую часть:
, выделяем действительную и мнимую часть:

КЧХ замкнутой системы относительно возмущающего воздействия:
10.Смоделируем систему на базе имитационного моделирования в программе Simulink, получим переходный процесс при заданном возмущающем воздействии:

График переходного процесса:

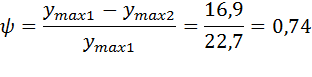
11. Оценка качества переходного процесса по возмущению.
1) Время регулирования: tр= 385 с;
2) Перерегулирование:
σ = |ymax1 – yуст| = 22,7;
3) Время достижения первого максимума: tmax=78,5;
4) Квадратичный интегральный критерий качества:

5) Частота переходного процесса:

6) Время затухания за 1 период:

7) Степень затухания:
8) Степень колебательности:

ВЫВОД
В данном курсовом проекте я:
- определил по кривой разгона «методом площадей» передаточную функцию регулируемого объекта;
 - рассчитал и построил частотные характеристики объекта регулирования (КЧХ, АЧХ и ФЧХ). Для ПИД-регулятора методом расширенных частотных характеристик рассчитал оптимальные значения параметров настройки, обеспечивающие заданный запас устойчивости системы, и минимальное значение квадратичного интегрального критерия качества;
- рассчитал и построил частотные характеристики объекта регулирования (КЧХ, АЧХ и ФЧХ). Для ПИД-регулятора методом расширенных частотных характеристик рассчитал оптимальные значения параметров настройки, обеспечивающие заданный запас устойчивости системы, и минимальное значение квадратичного интегрального критерия качества;
- получил переходный процесс, являющийся оптимальным, оценил качество полученного переходного процесса: время регулирования = 385 с.; перерегулирование = 22,7; коэффициенты затухания = 0,26 и колебательности = 0,21;
- рассчитал и построил КЧХ замкнутой системы относительно возмущающего воздействия;
- построил переходный процесс в системе регулирования при единичном скачкообразном возмущающем воздействии;
Построенная мной система АСР объектом управления, взятая на основе реального объекта управления является устойчивой, т.к. в системе возможен установившийся режим. Параметры удовлетворяют необходимым условиям регулируемого объекта и вполне приемлемы для его нормального функционирования, вследствие чего регулируемый параметр, т.е. температура перегретого пара в котле будет поддерживаться на необходимом уровне.
СПИСОК ЛИТЕРАТУРЫ
1. Востриков, А.С. Теория автоматического регулирования: Учеб.пособие/ Востриков А.С., Французова Г.А.– Новосибирск: Изд-во НГТУ, 2003.– 364 с.
2. Ротач,В.Я.Теория автоматического управления теплоэнергетическими процессами:
Учебник для вузов / Ротач В.Я.–М: Энергоатомиздат, 1985.– 296 с.
3. Клюев, А.С.Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / КлюевА.С.,
ЛебедевА.Т. – М.: Энергоатомиздат,1989.
4. Прохватилов В.В.Методические указания к выполнению курсового проекта по теории автоматического управления: Методические указания / Прохватилов В.В.,
Кантемиров В.И.– Астрахань: Изд-во АГТУ, 2007.– 35 с.
5. Стефани Е.П. Основы расчета настройки регуляторов теплоэнергетических процессов / Стефани Е.П..– М: Энергия, 1972.– 376 с.